Robertson AP45 Autopilot | Page |
Design and theory of operation |
|
3. DESIGN AND THEORY OF OPERATION
Automatic Steering An autopilot is an apparatus that controls the rudder of a vessel in order to maintain a selected heading.
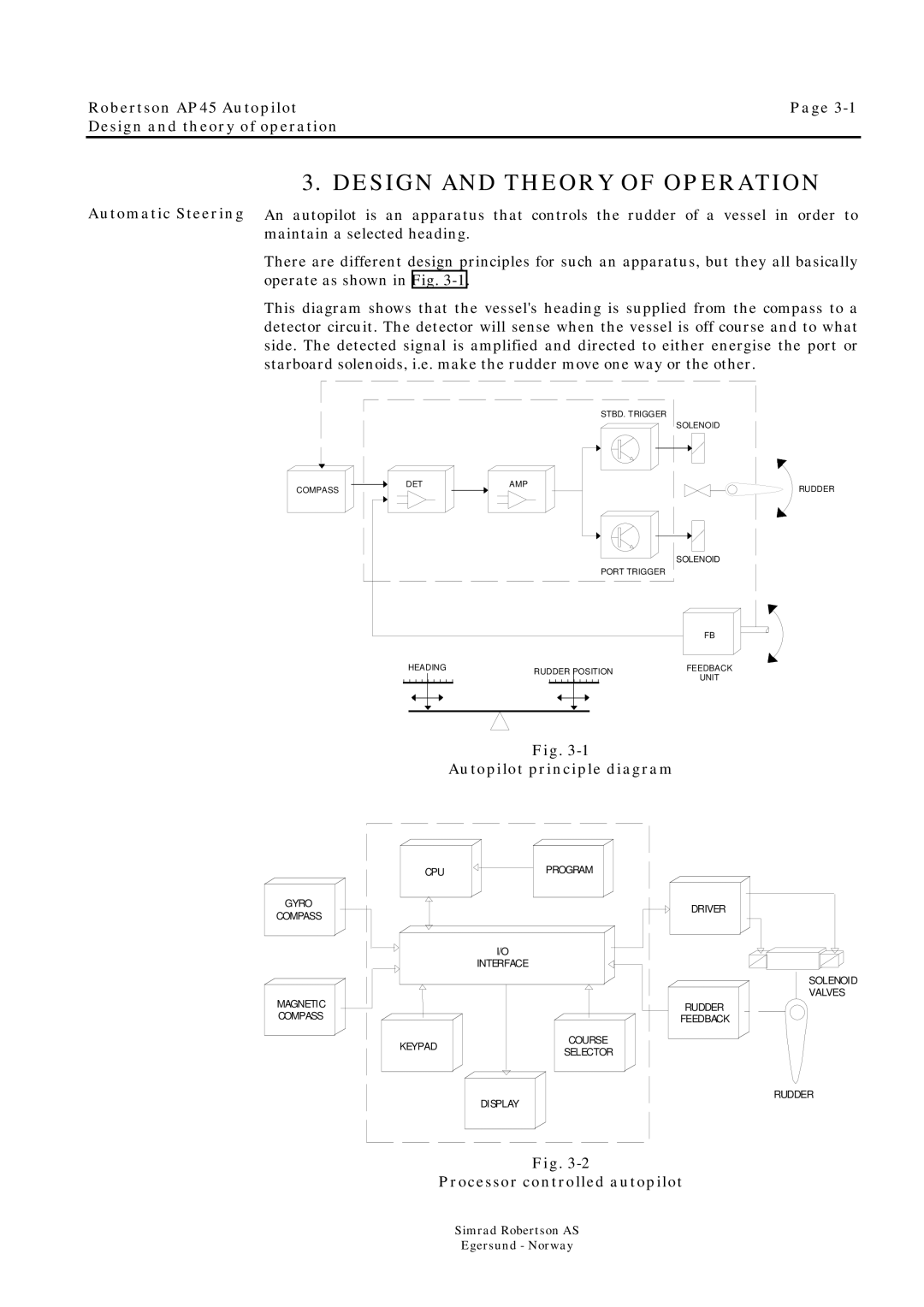
There are different design principles for such an apparatus, but they all basically operate as shown in Fig.
This diagram shows that the vessel's heading is supplied from the compass to a detector circuit. The detector will sense when the vessel is off course and to what side. The detected signal is amplified and directed to either energise the port or starboard solenoids, i.e. make the rudder move one way or the other.
|
|
| STBD. TRIGGER |
|
|
| SOLENOID |
COMPASS | DET | AMP | RUDDER |
|
|
|
|
|
|
|
|
|
|
|
|
|
| SOLENOID |
|
|
|
|
|
|
|
|
|
|
| PORT TRIGGER |
|
|
|
|
|
|
|
|
|
|
|
|
| FB |
HEADING | RUDDER | POSITION | FEEDBACK | |||||||||
|
|
|
|
|
|
|
|
|
|
|
| UNIT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fig.
Autopilot principle diagram
CPU
GYRO
COMPASS
I/O
INTERFACE
MAGNETIC
COMPASS
KEYPAD
DISPLAY
PROGRAM
DRIVER
SOLENOID
VALVES
RUDDER
FEEDBACK
COURSE
SELECTOR
RUDDER
Fig.
Processor controlled autopilot
Simrad Robertson AS
Egersund - Norway