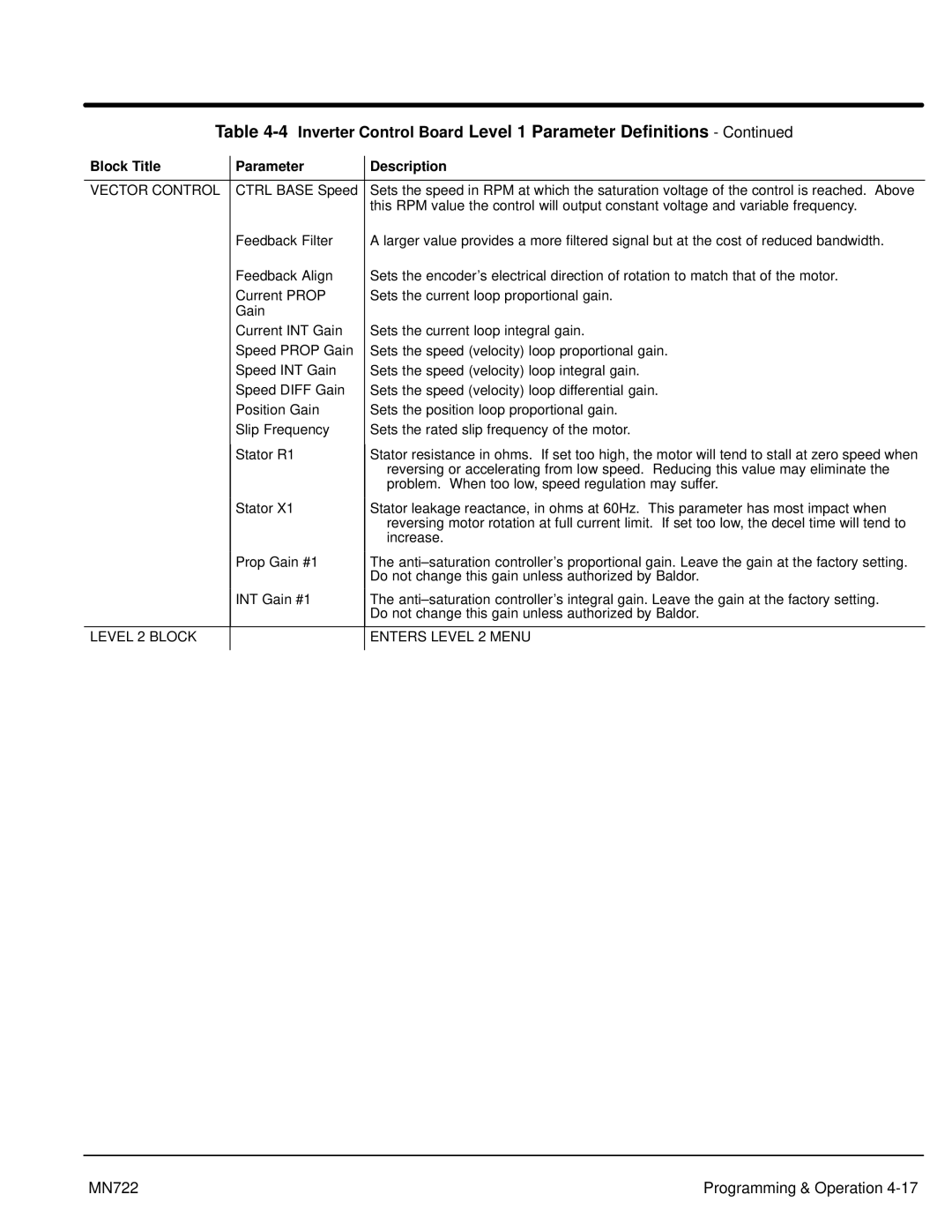
Table 4-4 Inverter Control Board Level 1 Parameter Definitions - Continued
Block Title | Parameter | Description |
|
|
|
VECTOR CONTROL | CTRL BASE Speed | Sets the speed in RPM at which the saturation voltage of the control is reached. Above |
|
| this RPM value the control will output constant voltage and variable frequency. |
| Feedback Filter | A larger value provides a more filtered signal but at the cost of reduced bandwidth. |
| Feedback Align | Sets the encoder’s electrical direction of rotation to match that of the motor. |
| Current PROP | Sets the current loop proportional gain. |
| Gain |
|
| Current INT Gain | Sets the current loop integral gain. |
| Speed PROP Gain | Sets the speed (velocity) loop proportional gain. |
| Speed INT Gain | Sets the speed (velocity) loop integral gain. |
| Speed DIFF Gain | Sets the speed (velocity) loop differential gain. |
| Position Gain | Sets the position loop proportional gain. |
| Slip Frequency | Sets the rated slip frequency of the motor. |
| Stator R1 | Stator resistance in ohms. If set too high, the motor will tend to stall at zero speed when |
| ||
|
| reversing or accelerating from low speed. Reducing this value may eliminate the |
|
| problem. When too low, speed regulation may suffer. |
| Stator X1 | Stator leakage reactance, in ohms at 60Hz. This parameter has most impact when |
|
| reversing motor rotation at full current limit. If set too low, the decel time will tend to |
|
| increase. |
| Prop Gain #1 | The |
|
| Do not change this gain unless authorized by Baldor. |
| INT Gain #1 | The |
|
| Do not change this gain unless authorized by Baldor. |
|
|
|
LEVEL 2 BLOCK
ENTERS LEVEL 2 MENU
MN722 | Programming & Operation |