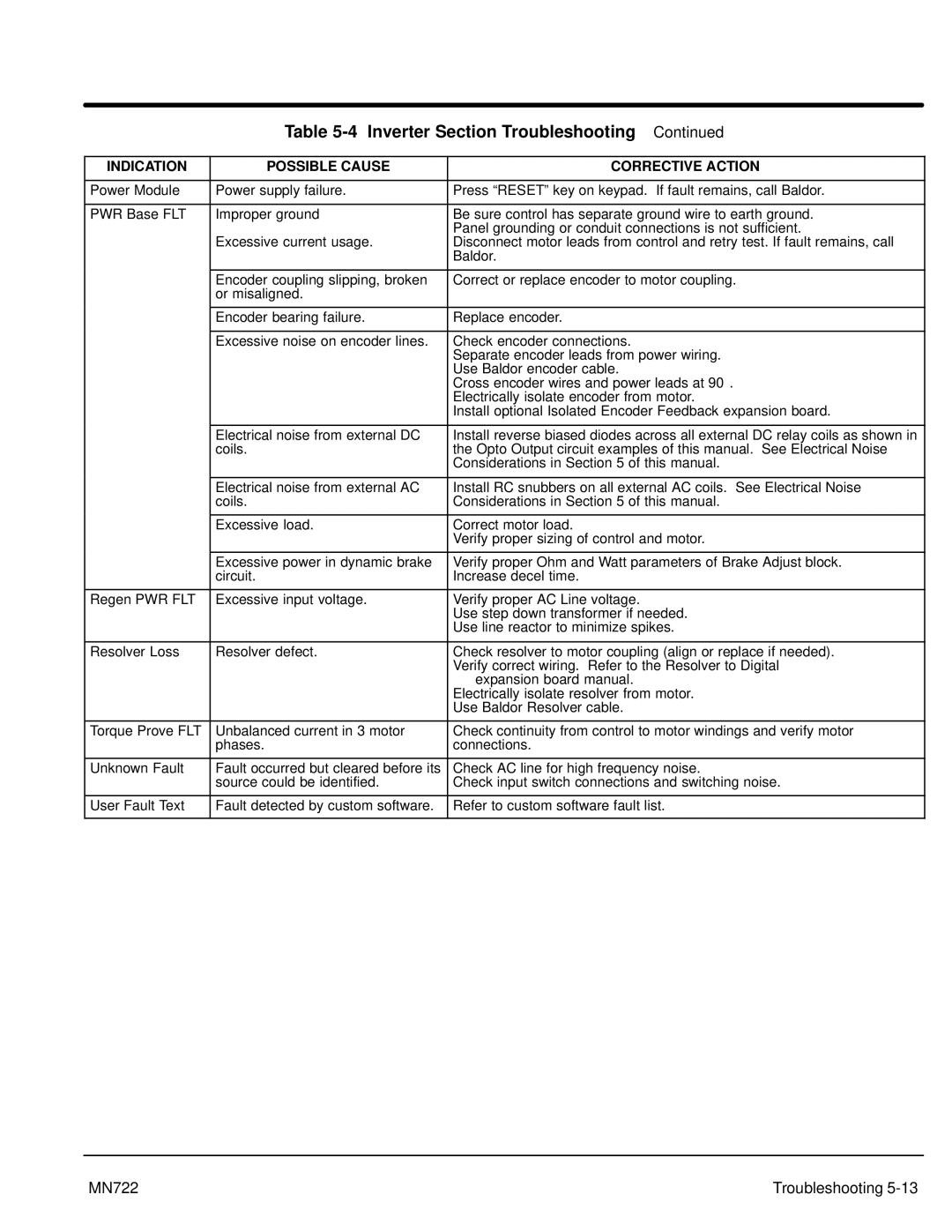
Table 5-4 Inverter Section Troubleshooting Continued
INDICATION | POSSIBLE CAUSE | CORRECTIVE ACTION |
|
|
|
Power Module | Power supply failure. | Press “RESET” key on keypad. If fault remains, call Baldor. |
|
|
|
PWR Base FLT | Improper ground | Be sure control has separate ground wire to earth ground. |
|
| Panel grounding or conduit connections is not sufficient. |
| Excessive current usage. | Disconnect motor leads from control and retry test. If fault remains, call |
|
| Baldor. |
|
|
|
| Encoder coupling slipping, broken | Correct or replace encoder to motor coupling. |
| or misaligned. |
|
|
|
|
| Encoder bearing failure. | Replace encoder. |
|
|
|
| Excessive noise on encoder lines. | Check encoder connections. |
|
| Separate encoder leads from power wiring. |
|
| Use Baldor encoder cable. |
|
| Cross encoder wires and power leads at 90° . |
|
| Electrically isolate encoder from motor. |
|
| Install optional Isolated Encoder Feedback expansion board. |
|
|
|
| Electrical noise from external DC | Install reverse biased diodes across all external DC relay coils as shown in |
| coils. | the Opto Output circuit examples of this manual. See Electrical Noise |
|
| Considerations in Section 5 of this manual. |
|
|
|
| Electrical noise from external AC | Install RC snubbers on all external AC coils. See Electrical Noise |
| coils. | Considerations in Section 5 of this manual. |
|
|
|
| Excessive load. | Correct motor load. |
|
| Verify proper sizing of control and motor. |
|
|
|
| Excessive power in dynamic brake | Verify proper Ohm and Watt parameters of Brake Adjust block. |
| circuit. | Increase decel time. |
|
|
|
Regen PWR FLT | Excessive input voltage. | Verify proper AC Line voltage. |
|
| Use step down transformer if needed. |
|
| Use line reactor to minimize spikes. |
|
|
|
Resolver Loss | Resolver defect. | Check resolver to motor coupling (align or replace if needed). |
|
| Verify correct wiring. Refer to the Resolver to Digital |
|
| expansion board manual. |
|
| Electrically isolate resolver from motor. |
|
| Use Baldor Resolver cable. |
|
|
|
Torque Prove FLT | Unbalanced current in 3 motor | Check continuity from control to motor windings and verify motor |
| phases. | connections. |
|
|
|
Unknown Fault | Fault occurred but cleared before its | Check AC line for high frequency noise. |
| source could be identified. | Check input switch connections and switching noise. |
|
|
|
User Fault Text | Fault detected by custom software. | Refer to custom software fault list. |
|
|
|
MN722 | Troubleshooting |