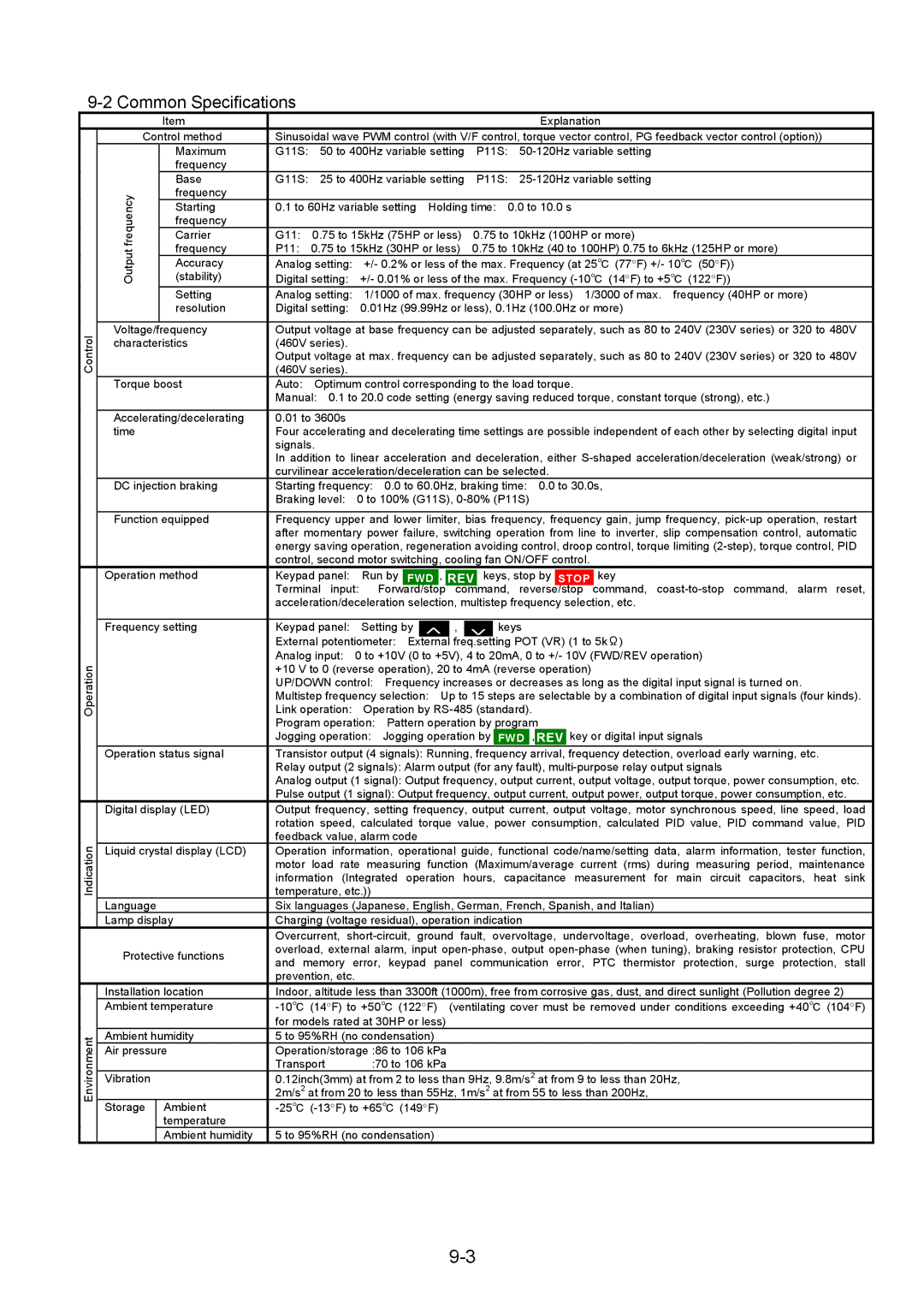
9-2 Common Specifications
Item
| Control method | |||
|
|
| Maximum | |
|
|
| frequency | |
|
|
| Base | |
| frequency | frequency | ||
| Starting | |||
|
|
| frequency | |
|
|
| Carrier | |
| Output | frequency | ||
| (stability) | |||
|
|
| Accuracy | |
|
|
| Setting | |
|
|
| resolution | |
|
|
|
| |
Control | Voltage/frequency | |||
characteristics | ||||
| ||||
|
|
| ||
| Torque boost | |||
|
|
| ||
| Accelerating/decelerating | |||
| time |
| ||
|
|
| ||
| DC injection braking | |||
|
|
| ||
| Function equipped | |||
|
|
| ||
| Operation method | |||
|
|
| ||
| Frequency setting | |||
Operation |
|
|
| |
|
|
| ||
| Operation status signal | |||
|
|
| ||
| Digital display (LED) | |||
Indication |
|
| ||
Liquid crystal display (LCD) | ||||
|
|
| ||
| Language |
| ||
| Lamp display | |||
| Protective functions | |||
|
|
| ||
| Installation location | |||
| Ambient temperature | |||
|
|
| ||
Environment | Ambient humidity | |||
Air pressure | ||||
| ||||
|
|
|
| |
| Vibration |
| ||
|
|
|
| |
| Storage |
| Ambient | |
|
|
| temperature | |
|
|
| Ambient humidity | |
Explanation
Sinusoidal wave PWM control (with V/F control, torque vector control, PG feedback vector control (option))
G11S: | 50 to 400Hz variable setting | P11S: | ||
G11S: | 25 to 400Hz variable setting | P11S: | ||
0.1 to 60Hz variable setting Holding time: | 0.0 to 10.0 s | |||
G11: | 0.75 to 15kHz (75HP or less) | 0.75 to 10kHz (100HP or more) | ||
P11: | 0.75 to 15kHz (30HP or less) | 0.75 to 10kHz (40 to 100HP) 0.75 to 6kHz (125HP or more) | ||
Analog setting: | +/- 0.2% or less of the max. Frequency (at 25℃ (77°F) +/- 10℃ (50°F)) | |||
Digital setting: | +/- 0.01% or less of the max. Frequency | |||
Analog setting: | 1/1000 of max. frequency (30HP or less) 1/3000 of max. frequency (40HP or more) | |||
Digital setting: | 0.01Hz (99.99Hz or less), 0.1Hz (100.0Hz or more) | |||
Output voltage at base frequency can be adjusted separately, such as 80 to 240V (230V series) or 320 to 480V (460V series).
Output voltage at max. frequency can be adjusted separately, such as 80 to 240V (230V series) or 320 to 480V (460V series).
Auto: Optimum control corresponding to the load torque.
Manual: 0.1 to 20.0 code setting (energy saving reduced torque, constant torque (strong), etc.)
0.01 to 3600s
Four accelerating and decelerating time settings are possible independent of each other by selecting digital input signals.
In addition to linear acceleration and deceleration, either
Starting frequency: 0.0 to 60.0Hz, braking time: 0.0 to 30.0s,
Braking level: 0 to 100% (G11S),
Frequency upper and lower limiter, bias frequency, frequency gain, jump frequency,
Keypad panel: Run by FWD , REV keys, stop by STOP key
Terminal input: Forward/stop command, reverse/stop command,
Keypad panel: Setting by ∧ , ∨ keys
External potentiometer: External freq.setting POT (VR) (1 to 5kΩ)
Analog input: 0 to +10V (0 to +5V), 4 to 20mA, 0 to +/- 10V (FWD/REV operation)
+10 V to 0 (reverse operation), 20 to 4mA (reverse operation)
UP/DOWN control: Frequency increases or decreases as long as the digital input signal is turned on.
Multistep frequency selection: Up to 15 steps are selectable by a combination of digital input signals (four kinds).
Link operation: Operation by
Program operation: Pattern operation by program
Jogging operation: Jogging operation by FWD , REV key or digital input signals
Transistor output (4 signals): Running, frequency arrival, frequency detection, overload early warning, etc.
Relay output (2 signals): Alarm output (for any fault),
Analog output (1 signal): Output frequency, output current, output voltage, output torque, power consumption, etc.
Pulse output (1 signal): Output frequency, output current, output power, output torque, power consumption, etc.
Output frequency, setting frequency, output current, output voltage, motor synchronous speed, line speed, load rotation speed, calculated torque value, power consumption, calculated PID value, PID command value, PID feedback value, alarm code
Operation information, operational guide, functional code/name/setting data, alarm information, tester function, motor load rate measuring function (Maximum/average current (rms) during measuring period, maintenance information (Integrated operation hours, capacitance measurement for main circuit capacitors, heat sink temperature, etc.))
Six languages (Japanese, English, German, French, Spanish, and Italian) Charging (voltage residual), operation indication
Overcurrent,
Indoor, altitude less than 3300ft (1000m), free from corrosive gas, dust, and direct sunlight (Pollution degree 2)
5 to 95%RH (no condensation) Operation/storage :86 to 106 kPa
Transport :70 to 106 kPa
0.12inch(3mm) at from 2 to less than 9Hz, 9.8m/s2 at from 9 to less than 20Hz, 2m/s2 at from 20 to less than 55Hz, 1m/s2 at from 55 to less than 200Hz,
5 to 95%RH (no condensation)