Page
Page
Page
Preface
Page
Table of Contents
Parameters
Troubleshooting
Digital Keypad Operation and Start Up
Fault Code Information and Maintenance
Appendix a Specifications Appendix B Accessories
Appendix C How to Select the Right AC Motor Drive
Introduction
Nameplate Information
Example for 5HP/3.7kW 3-phase 230V AC motor drive
Receiving and Inspection
Model Explanation
5HP/0.75-3.7kW Frame B 15HP/5.5-11kW Frame C
Series Number Explanation
Drive Frames and Appearances
Preparation for Installation and Wiring Ambient Conditions
15-30HP/11-22kW Frame D 40-100HP/30-75kW Frame E
Transportation
Operation
Storage
Remove Keypad
Remove Front Cover
Lifting
Step
Dimensions
Introduction
Introduction
Introduction
Frame E
This page intentionally left blank
Installation and Wiring
Wiring
RL1 UT1 SL2 VT2 TL3 WT3
For models of VFD-VE Series 20HP/15kW and above
External Wiring
FWD REV MI1 MI2 MI3 MI4 MI5 MI6 DCM
Main Circuit Main Circuit Connection
Brak e res istor
NFB
+2/B1
Motor
Output terminals for main circuit U, V, W
Mains power terminals R/L1, S/L2, T/L3
Terminals +1, +2 for connecting DC reactor
Forward running
Spec ial braking resis tor/unit
+2/B1 Brake resistoroptional Brake unitoptional
Refer to Appendix B for the use
Grounding terminals
Models Wire Torque Wire Type
Main Circuit Terminals
Control Terminals
Position of the Control Terminals
DFM
FWD
OFF
MRA
MO1
Terminal Terminal Function Factory Settings Sink
MCM
MO2
Analog input terminals AVI, ACI, AUI, ACM
AFM
ACM
AVI/ACI/AUI ACM
AWG 0.3-2.1mm
Frame Torque Wire
General
Page
Display Message
Descriptions
Displays the selected parameter
External Fault
Display Message Descriptions
Displays the actual stored value of the selected parameter
How to Operate the Digital Keypad KPV-CE01
Start
To copy parameters
LCD
Dimension of the Digital Keypad
Reference Table for the LCD Display of the Digital Keypad
Start-up Preparations before Start-up
External signal
Operation Method
Communication Communication address definition
JOG
Trial Run
Check following items
Digital Keypad Operation and Start Up
This page intentionally left blank
Parameters
Group 0 System Parameters
Summary of Parameter Settings
Parameter can be set during operation
Time Unit for Unit 0.01 second 00-14
Group 1 Basic Parameters
01-36 1st Output Voltage 230V 0.1V~255.0V
Group 2 Digital Input/Output Parameters
RUN/STOP, REV/FWD
MOA
Width of the Desired
Group 3 Analog Input/Output Parameters
AUI
~200.0% 100.0
Group 4 Multi-Step Speed Parameters
Group 5 Motor Parameters
Group 6 Protection Parameters
Parameters
06-28 Electronic Thermal 30.0~600.0 sec
Group 7 Special Parameters
Speed Search 07-10 Base-block Speed Stop operation
07-29 High Torque Offset
Group 8 High-function PID Parameters
08-32 Tension PID P2
100.0 Feedback
Group 9 Communication Parameters
09-20 Block Transfer
Group 10 Speed Feedback Control Parameters
Explanation Settings
Group 11 Advanced Parameters
Version Differences
Version
Crane function
Low-voltage during constant speed
Version 2.02, the parameters are from Pr.08-00 to Pr.08-15
Version Group 0 System Parameters
New settings 44~50 for Pr.02-00~Pr.02-06 and new parameter
02-35 Multi-function Output
Setting Reserved 02-43 Zero-speed Level ~65535 rpm Motor
05-03 Rated speed of Motor
Setting 08-00 Input Terminal for PID No function Feedback
PID
Switch Level for Smart ~100.0% according to Pr.08-26
Setting 10-04 ASR Auto Speed
00-01
Description of Parameter Settings
00-00
Start-up Display Selection
Factory setting
00-03
00-04
00-04Content of Multi-Function function Display Settings
MI9 MI8 MI7 MI6 MI5 MI4 MI3 MI2 MI1 REV FWD
MO2 MO1 MRA
00-08
00-06
00-07
No password set or successful input in Pr
00-08 00-07
Energy Saving Gain Unit
Factory setting 100%
00-09
00-10
00-12
Settings Constant Torque 100% Variable Torque 125%
Optimal Acceleration/Deceleration Setting
Constant/Variable Torque Selection
00-17
00-14
00-15 00-16
230V/460V Series
00-19
00-18
Auto Voltage Regulation AVR Function
Auto Energy-saving Operation
Settings Ramp to stop Coast to stop
Source of the Master Frequency Command Factory setting
Stop Method Factory setting
00-20
00-23
Reverse Operation
01-35
01-00
01-01
01-02
01-38
01-04
01-37
01-05
01-42
Settings 00~600.00Hz
01-41
01-09
60Hz =Fl ow
FcmdFmi n Pr.01
Pr.01 =Fl ow =Fc md
Flow
01-11
01-10
Output Frequency Upper Limit Unit
Output Frequency Lower Limit Unit
01-14
01-12
01-13
01-15
01-24 01-25 01-26
01-22
01-23
01-29
01-27
01-28
01-30
Fout 01-34=0 01-34=1 01-34=2 Fmin 01-07 Frequency command
FWD/STOP
RUN/STOP, REV/FWD
02-00 Control Circuits of the External Terminal
REV/STOP
Multi-Function Input Command
02-30
Parameters
JOG are included. Refer to Pr -00~04-29
Settings Functions Descriptions
As long as the ON/OFF status is restored, the speed-tracing
Function could still be operated
OFF FOC+PG speed control mode
Command form AVI Force to be AVI Operation speed
Command form ACI Force to be ACI Operation speed
When it is ON, the drive will operate by 1st V/f
Enable multi-step
Motor Frequency 10-19 Feedbac k 10-00 10-01
Enable position control
Execute position control
RUN
When this function is enabled, the pulse of PG card will
Change from speed command to position command. It is
02-07
UP/DOWN Key Mode
Serial position input
MI9 MI8 MI7 MI6
02-09
02-10
MI4 MI3 MI2 MI1 REV
02-35
02-13
02-14
02-36
Settings Functions Descriptions
Indication Baseblock Active when the warning is detected
Settings Functions Descriptions
For error treatment of tension PID feedback
It will be OFF when brake delay time exceeds Pr.02-31
When the error between PID target value and PID feedback
Speed Attained
Multi-output Direction Unit1
Reserved Example of crane function
02-15
02-16
02-17
02-20
02-18
02-19
02-21
Output Current Level Setting for External Terminals Unit1
Brake Delay Time Unit0.001
Settings 000~65.000 Sec
02-31
02-43
02-33
02-34
03-02
03-00
03-01
03-05
03-03
03-04
03-11
03-09
03-10
03-12
03-16
03-14
03-15
03-17
10~10V=0~100%
~10V=0~100%
~20mA=0~100%
03-25
03-19
03-22
03-20
04-02
04-00
04-01
04-03
MI4 MI3 MI2 MI1
05-00
05-03
05-01
05-02
05-04
05-10
05-06
05-07
05-12
Connection is finished Connection control
05-14
05-13
Full-load Current of Motor Unit 1%
05-15
05-19
05-17
05-18
05-22
05-26
05-24
05-25
05-27
05-32
05-29
05-31
06-01
06-00
Low Voltage Level Unit
Over-Voltage Stall Prevention Unit
06-04
06-02
06-03
Over-torque Detection Selection OT1
06-05
06-06
06-07
06-10
06-11
06-14
06-12
06-13
06-28
06-16
Load
06-15
Parameters
06-24
Fault code Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Current Volt
06-23
06-25
Revision August 2008, 03VE, SW 103
ACE
Fault code Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6
External fault input EF
06-29
PTC Positive Temperature Coefficient Detection Selection
Connection
06-30
06-33
06-31
06-32
06-34
07-02
07-00
07-01
07-03
07-06
Momentary Power Loss Operation Selection
Maximum Allowable Power Loss Time Unit
07-07
07-08
Baseblock Time for Speed Search BB Unit
07-09
Current Limit for Speed Search Unit
07-11
Auto Restart After Fault Unit
07-10
07-12
07-14
Decel. Time Selection for Momentary Power Loss DEB function
07-13
DEB Return Time Unit
Status 2 unexpected power off, such as momentary power loss
07-17
07-15
07-16
07-18
07-22
07-20
07-21
07-23
07-27
07-25
07-26
07-30
07-28
07-29
07-31
07-36
Emergency Stop EF & Forced Stop Selection
08-01
08-02
08-05
08-03
08-04
08-06
Feedback Signal Detection Time Unit
08-08
08-10
To 3600.0 sec
08-09
08-11
08-15
08-13
08-14
08-16
Line speed, speed mode
Open-loop, torque mode
08-24
08-22
08-23
08-26
08-29
Auto-tuning Tension PID
08-28
Tension PID P1 Unit
08-32
08-30
08-31
08-33
08-38
DFM DCM
DCM AB2
08-39
Pulse Number for Each Meter Unit
Settings To 3000.0 m/min
08-40
08-41
08-46
08-43
08-44
08-47
08-52
08-50
08-51
08-54
08-62
08-57
08-58
08-68
08-64
08-67
08-69
08-77
08-71
08-75
08-78
08-85
08-83
08-84
08-86
09-01
09-00
Communication Address
09-02
09-03
Settings Modbus Ascii mode, protocol 7,N,1
Ascii mode
09-04
RTU mode
STX
END
Data
Start
6FH
F7H
0FH
Address ‘0’ ‘1’ Function ‘3’ Starting data address ‘4’
Content
A0H
Jog + Run
00B No function
Command F
Ascii mode RTU mode
Code
C3H
A1H
09-07
09-05
09-06
09-08
09-11
09-09
09-10
09-12
09-16
09-14
09-15
09-17
Encoder Pulse
Group 10 PID Control
10-00
Fwdrev
10-04
10-02
10-03
10-05
10-12
10-09
10-10
10-15
10-13
10-14
FWD REV
10-18
10-16
10-17
10-19
10-22
10-20
10-21
10-23
10-28
10-26
10-27
10-29
Control Diagram fo r the Torque + Encoder
Speed
YES
11-00
System Control
11-03
11-01
11-02
11-11
11-05
Gain Value of Flux Weakening Curve for Motor Unit
11-08
11-06
11-07
11-09
11-14
11-12
11-13
11-15
11-19
11-17
11-18 APR Gain
11-20
Revision August 2008, 03VE, SW 165
Page
Troubleshooting
Over Current OC
Over Voltage OV
Ground Fault
Ground fault
Suitable power
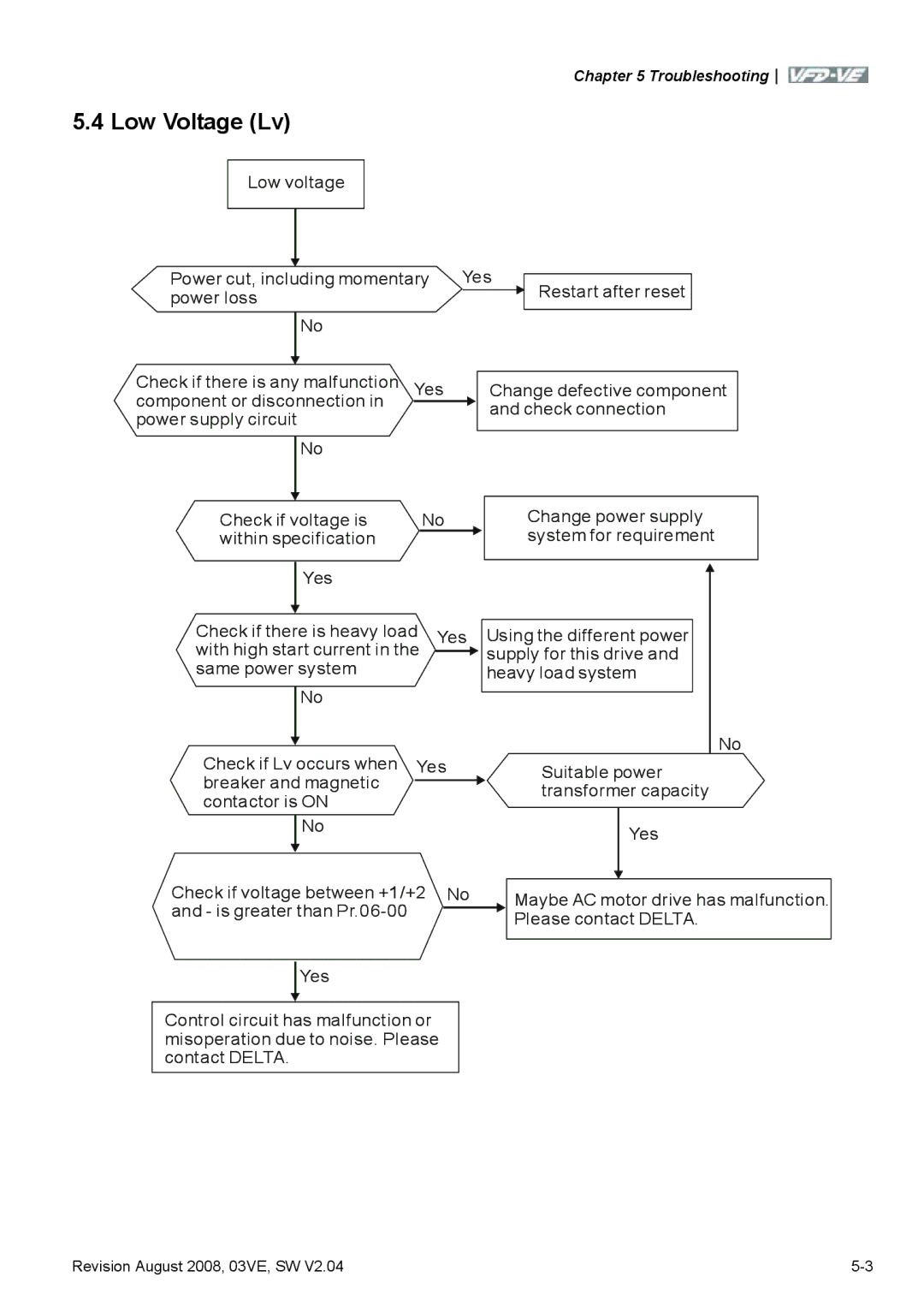
Low Voltage Lv
Overload
Reduce load or increase the power of AC motor drive
Over Heat oH1, oH2, oH3
OL1/ OL2
Yes
Phase Loss PHL
Display of KPV-CE01 is Abnormal
Motor cannot Run
Motor Speed cannot be Changed
Motor Stalls during Acceleration
Motor does not Run as Expected
Electromagnetic/Induction Noise
Environmental Condition
Affecting Other Machines
Fault Code Information
Common Problems and Solutions
Provided for AC motor drive protection
Ground fault Not for protection of the user
Phase Loss
Overheating
Igbt overheating
Heatsink
Motor overheating
OC hardware error
Isum error
Phase error
OV hardware error
Connection switch
Password is locked
Brake resistor fault
Error
It will be displayed
Reset
When slip exceeds
Decrease the load if overload
Periodic Inspection
Maintenance and Inspections
Daily Inspection
One
Voltage Maintenance Check Items Methods and Criterion
Keypad Maintenance Check Items Methods and Criterion
Change of copper plate
Check Items Methods and Criterion
Daily
Visual, aural inspection and smell Or peculiar smell
Change fan Overheat
This page intentionally left blank
Appendix a Specifications
± 5%
Model Vfdb Model and No. Torque
All Brake Resistors & Brake Units Used in AC Motor Drives
Applicable
BR1K2W6P8
Decrease accordingly. Suggested cycle time is one minute
Prevent damaging the brake resistor
VFD Series
Dimensions and Weights for Brake Resistors
Dimensions are in millimeter
Order P/N BR500W030, BR500W100, BR1KW020, BR1KW075
Specifications for Brake Unit
189.5 200.0
Dimensions for Brake Unit
Dimensions are in millimeterinch
VFDB4132
No-fuse Circuit Breaker Chart
Phase
Model Line Fuse Input Output Bussmann P/N
Fuse Specification Chart
Smaller fuses than those shown in the table are permitted
VFD007V23A-2 JJN-10 VFD007V43A-2
Impedance
AC Reactor AC Input Reactor Recommended Value
AC Output Reactor Recommended Value
37.5 52.5 18.5 67.5 82.5 120 100 150 130 195
Fundamental Max Inductance mH Continuous Amps
37.5 52.5 18.5 67.5 120 100 150 130 195 160 240
Applications for AC Reactor
May damage the mains circuit
Silicon rectifier Powerreactor AC motor drive Reactor Motor
Diagram B
Zero Phase Reactor RF220X00A
Diagram a
Nominal Method
DC Choke Recommended Values
Input voltage DC Amps Inductance mh
+10V
Remote Controller RC-01
AFM ACM AVI
DCM MI5 FWD REV JOG VFD-VE
PG1 PG2
PG Card for Encoder EMV-PG01X
ABZ1
70m Basic Wiring Diagram wiring
300m
Voltage
Types of Pulse Generators Encoders
12V
Types of Pulse Generators
Terminal Descriptions Symbols
EMV-PG01O
PG OUT
70m
Z1, Z1 Phase or 2-phase input. Maximum 300kP/sec A2, A2
Wire Gauge 25mm2 AWG16 or above Basic Wiring Diagram
EMV-PG01O
Voltage
EMV-PG01L
Power source of EMV-PG01L
Z1, Z1 Phase input. Maximum 300kP/sec
Output Voltage +5V ±5% 200mA
Wire Gauge 25mm2 AWG16 or above Basic Wiring Diagram wiring
ABZ1 AB2
Complementary
10TDT1W4C
AMD-EMI Filter Cross Reference
AC Drives Model Number FootPrint
26TDT1W4C
Choose suitable motor cable and precautions
Saddle on both ends Saddle on one end
1000V 1300V 1600V 460VAC input voltage
Insulation level of motor 1000V 1300V 1600V
„ For models 5hp/3.7kW and less
230VAC input voltage
Appendix B Accessories
Dimensions are in millimeter and inch
Order P/N RF015B21AA / RF022B43AA
Order P/N RF022B21BA / RF037B43BA
302 315
Order P/N RF110B43CA
Order P/N 10TDT1W4C Order P/N 26TDT1W4C
Order P/N 50TDS4W4C Order P/N 100TDS84C
Order P/N 200TDDS84C Order P/N 150TDS84C
Order P/N 180TDS84C
Terminals Description
Power
Multi-function I/O Extension Card Functions
SO2-MCM
Terminals
SO1-MCM
MI7~MIB
Dimensions Wiring
This page intentionally left blank
Page
Speed Time Overload Starting Torque Ratings
Related Specification
Capacity Formulas
Starting capacity=
When one AC motor drive operates one motor
When one AC motor drive operates more than one motor
General Precaution
⋅ IM ≤ the rated current of AC motor drive a
Parameter Settings Note
Selection Note
How to Choose a Suitable Motor
Standard motor
Pole-changing Dahlander motor
Power Transmission Mechanism
Special motors
Motor torque
Motor
This page intentionally left blank