Functions & Installation 4. Operation Mode (TEACH/AUTO)
4.Operation Mode (TEACH/AUTO)
NOTE A coordinate point including the arm pose is defined as “position (point),” and the data is called “point data.”
4.1
Outline
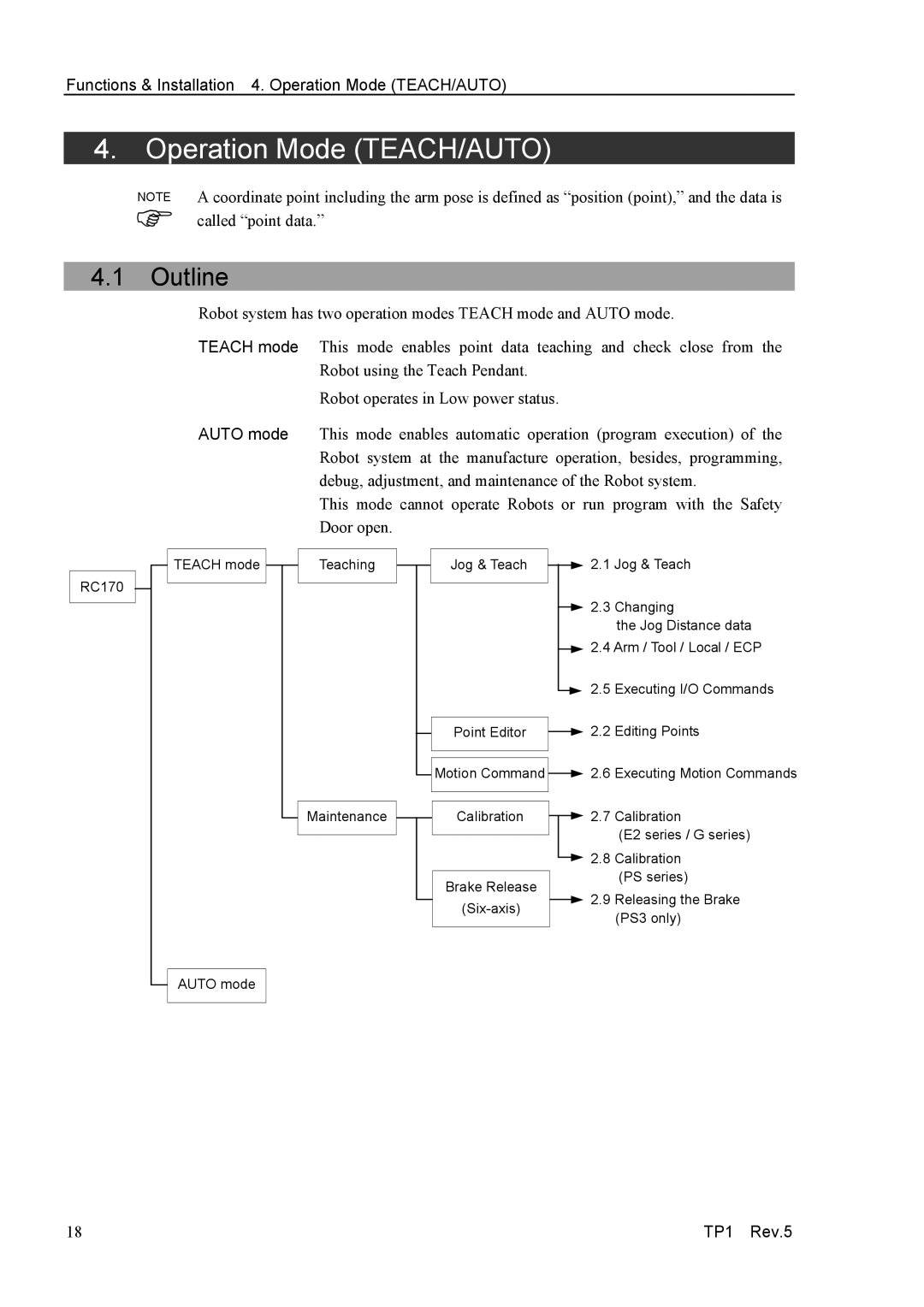
Robot system has two operation modes TEACH mode and AUTO mode.
TEACH mode This mode enables point data teaching and check close from the Robot using the Teach Pendant.
Robot operates in Low power status.
AUTO mode This mode enables automatic operation (program execution) of the Robot system at the manufacture operation, besides, programming, debug, adjustment, and maintenance of the Robot system.
This mode cannot operate Robots or run program with the Safety Door open.
RC170
| TEACH mode |
| Teaching |
|
| ||
|
|
|
|
Maintenance
|
| Jog & Teach |
|
|
| 2.1 Jog & Teach | |
|
|
|
|
| |||
|
|
|
|
|
| 2.3 | Changing |
|
|
|
|
|
| ||
|
|
|
|
| |||
|
|
|
|
|
|
| the Jog Distance data |
|
|
|
|
|
| 2.4 Arm / Tool / Local / ECP | |
|
|
|
|
|
| ||
|
|
|
|
| 2.5 | Executing I/O Commands | |
|
|
|
|
| |||
|
|
|
|
|
| 2.2 | Editing Points |
|
| Point Editor |
|
|
| ||
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Motion Command |
|
|
| 2.6 | Executing Motion Commands |
|
|
|
|
| |||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Calibration |
|
|
| 2.7 | Calibration |
|
|
|
|
| |||
|
|
|
|
|
|
| (E2 series / G series) |
|
|
|
|
|
|
| |
|
|
|
|
|
| 2.8 | Calibration |
|
|
|
|
| |||
|
|
|
|
|
|
| (PS series) |
|
| Brake Release |
|
|
|
| |
|
|
|
|
| 2.9 | Releasing the Brake | |
|
|
|
|
| |||
|
|
|
|
| |||
|
|
|
|
|
| (PS3 only) | |
|
|
|
|
|
|
| |
AUTO mode
18 | TP1 Rev.5 |