Operation 2. TEACH Mode
2.1[Jog & Teach]
This section indicates settings in the [Jog&Teach] screen.
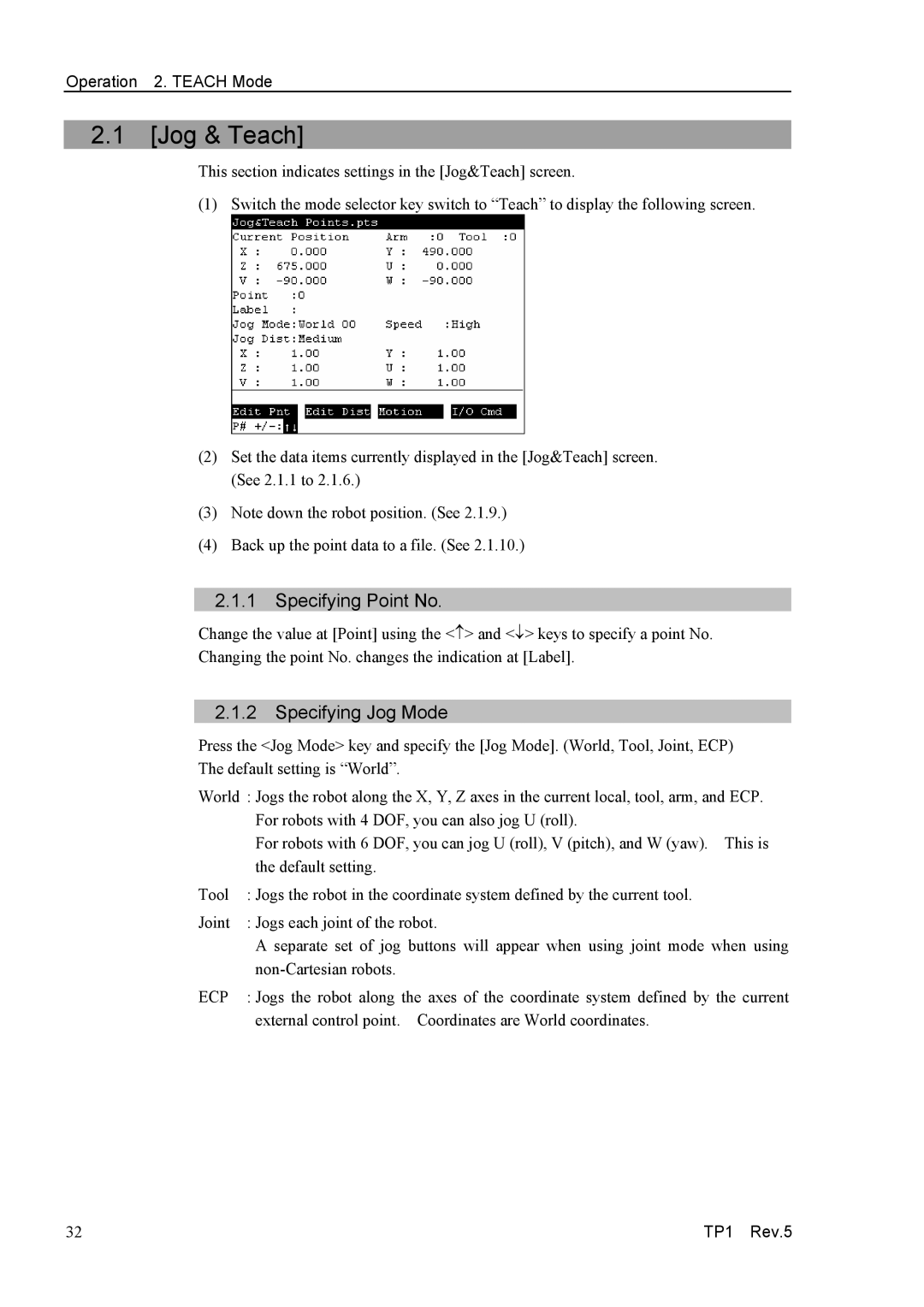
(1) Switch the mode selector key switch to “Teach” to display the following screen.
(2)Set the data items currently displayed in the [Jog&Teach] screen. (See 2.1.1 to 2.1.6.)
(3)Note down the robot position. (See 2.1.9.)
(4)Back up the point data to a file. (See 2.1.10.)
2.1.1Specifying Point No.
Change the value at [Point] using the <↑> and <↓> keys to specify a point No.
Changing the point No. changes the indication at [Label].
2.1.2Specifying Jog Mode
Press the <Jog Mode> key and specify the [Jog Mode]. (World, Tool, Joint, ECP) The default setting is “World”.
World : Jogs the robot along the X, Y, Z axes in the current local, tool, arm, and ECP. For robots with 4 DOF, you can also jog U (roll).
For robots with 6 DOF, you can jog U (roll), V (pitch), and W (yaw). This is the default setting.
Tool | : Jogs the robot in the coordinate system defined by the current tool. |
Joint | : Jogs each joint of the robot. |
| A separate set of jog buttons will appear when using joint mode when using |
| |
ECP | : Jogs the robot along the axes of the coordinate system defined by the current |
| external control point. Coordinates are World coordinates. |
32 | TP1 Rev.5 |