Data Manual
Data Manual
FIXED-POINT Digital Signal Processor
Recommended Operating Conditions
C64x+ Peripheral Information and Electrical Specifications
FIXED-POINT Digital Signal Processor
Enhanced Turbo Decoder Coprocessor TCP2
Features
Description
ZTZ/GTZ BGA Package Bottom View
ZTZ/GTZ 697-PIN Ball Grid Array BGA Package Bottom View
Submit Documentation Feedback
Functional Block Diagram
Functional Block Diagram
C6455
Device Characteristics
Characteristics of the C6455 Processor
Hardware Features
CPU DSP Core Description
FIXED-POINT Digital Signal Processor
C64x+ CPU DSP Core Data Paths
C6455 Memory Map Summary
Memory Map Summary
Memory Block Description Block Size Bytes HEX Address Range
0FFF Ffff
02CF Ffff
02DF Ffff
03FF Ffff
Boot Modes Supported
Boot Sequence
FIXED-POINT Digital Signal Processor
2 2nd-Level Bootloaders
Pin Map
Pin Assignments
C6455 Pin Map Bottom View Quadrant B
C6455 Pin Map Bottom View Quadrant C
C6455 Pin Map Bottom View Quadrant D
Signal Groups Description
URADDR4/PCBE0/GP2C SYSCLK4/GP1A
TINPL1 TOUTL1
TINPL0
Gpio
ABE7 ABE6 ABE5 ABE4
ACE5A ACE4A
ACE3A
ACE2A
Clks Shared
HCNTL0/PSTOP HCNTL1/PDEVSEL HHWIL/PCLK HPI16 only
Hpia
CLKR1/GP0
URSOC/MRXER/RMRXER
UXADDR3/MDIO
Rgmdio
UXADDR4/MDCLK
UXDATA0/MTXD0/RMTXD0
UXDATA4/MTXD4
URDATA3/MRXD3 UXDATA3/MTXD3 URDATA2/MRXD2 UXDATA2/MTXD2
UXDATA1/MTXD1/RMTXD1
Terminal Functions
Signal
IPD/IPU Description Name CLOCK/PLL Configurations
Terminal Functions
Signal Name
Type 1 IPD/IPU
Emifa 64 BIT BUS Arbitration
Emifa 64 BIT Control Signals Common to ALL Types of Memory
Emifa 64 BIT ASYNCHRONOUS/SYNCHRONOUS Memory Control
AEA15
Signal TYPE1 Name
IPD/IPU2 Description Emifa 64 BIT Address
AEA1916
AEA4
IPD/IPU Description Name
AEA6
AEA5
Signal TYPE1 IPD/IPU2 Description Name Emifa 64 BIT Data
AED18
AED21
AED20
AED19
DDR2 Memory Controller 32 BIT Address
IPD/IPU2 Description
IPD/IPU Description Name DDR2 Memory Controller 32 BIT Data
Timer
INTER-INTEGRATED Circuit I2C
Utopia Slave ATM Controller Transmit Interface
Signal TYPE1 IPD/IPU2 Description Name
Multichannel Buffered Serial Port 1 McBSP1
Multichannel Buffered Serial Port 0 McBSP0
TYPE1 IPD/IPU2 Description
URADDR2/PINTA1/ GP14 URADDR1/PRST
Utopia Slave ATM Controller Receive Interface
Management Data INPUT/OUTPUT Mdio for MII/RMII/GMII
Signal TYPE1 IPD/IPU2 Description Name Rapidio Serial Port
Management Data INPUT/OUTPUT Mdio for Rgmii
Device Configuration
Reserved for Test
Rgrefclk
RSV05
RSV07 RSV09
RSV16
RSV13
RSV14
RSV15
IPD/IPU2 Description Supply Voltage Monitor Pins
Signal TYPE1 Name no
Supply Voltage Pins
U16
AB7
AA1 AA6
AC6 AC9
CV DD
AD5 AD7
AE6 AE8
AF1
Cvdd
Ground Pins
GND
F20 F22 F24 G11 G13 G15 G17 G19 G21 G23
M16 M18 M24 M26 M29 N13 N15 N17 N19 N23 P12 P14 P16 P18
AB6
AA2 AA7
AC7 AC8
AH1
AD6
AE4 AE7
GND AF2
Device and Development-Support Tool Nomenclature
Development
Development Support
Device Support
SM=Qualifieddevice
C6000 DSP platforms
FIXED-POINT Digital Signal Processor
IPU1
Device Configuration at Device Reset
C6455 Device Configuration Pins AEA190, ABA10, and Pcien
Configuration IPD PIN
AEA11
AEA14
AEA13
AEA12
ABA0
Peripheral Configuration at Device Reset
Configuration IPD Functional Description PIN
IPU
AUTO-INIT
Configuration PIN Setting Utopiaen Pcien PIN
UTOPIAEN, and MACSEL10 Peripheral Selection Utopia and Emac
Lower Upper
Peripherals That can be This State
Peripheral Selection After Device Reset
Peripheral States
State
Unlock the PERCFG0 register by Using the Perlock register
Static Powerdown Reset Enable Progress Disabled Enabled
Device State Control Registers
Device State Control Registers
HEX Address Range Acronym Register Name
Lockval
Peripheral Lock Register Description
Lockval
Bit Field Value Description 310
Bit Field Value Description
Peripheral Configuration Register 0 Description
Bit Field
DDR2CTL Emifactl
Peripheral Configuration Register 1 Description
DDR2CTL
Hpistat
Peripheral Status Registers Description
I2CSTAT
1715
Utopiastat Pcistat
SM320C6455-EP
Utopiastat
Rmiirst
Emac Configuration Register Emaccfg Description
Emuctl
Emulator Buffer Powerdown Register Emubufpd Description
Pcieeai MACSEL1 MACSEL0
Device Status Register Description
Emifaen DDR2EN Pcien CFGGP2 CFGGP1 CFGGP0
Sysclkout MCBSP1EN PCI66
MACSEL10
Pcieeai
Utopiaen
Variant
BOOTMODE30
Jtag ID Jtagid Register Description
Variant Part Number Manufacturer LSB
Pullup/Pulldown Resistors
Configuration Examples
HPI VCP2 HRDY,HINT
FIXED-POINT Digital Signal Processor
System Interconnect
Internal Buses, Bridges, and Switch Fabrics
Data Switch Fabric Connections
Switched Central Resource Block Diagram
SCR Connection Matrix
Configuration Switch Fabric
C64x+ Megamodule SCR Connection
BUS Master Default Priority Control Priority Level
C6455 Default Bus Master Priorities
Bus Priorities
Memory Architecture
X+ Megamodule Block Diagram
C6455 L1P Memory Configurations
C6455 L2 Memory Configurations
AID0 Bit
Memory Protection
Bandwidth Management
Available Memory Page Protection Schemes
Reset Type Megamodule
Power-Down Control
Megamodule Resets
Megamodule Reset Global or Local
Revision
Megamodule Revision
Version Revision a
Version
Megamodule Interrupt Registers
C64x+ Megamodule Register Descriptions
Megamodule Revision Register
Megamodule Powerdown Control Registers
Megamodule Idma Registers
Megamodule Cache Configuration Registers
MAR168 Controls Emifa CE2 Range A800 0000 A8FF Ffff
Megamodule L1/L2 Memory Protection Registers
L2MPPA7
L2MPPA4
L2MPPA5
L2MPPA6
L1PMPPA21
L1PMPPA18
L1PMPPA19
L1PMPPA20
10. CPU Megamodule Bandwidth Management Registers
11. Device Configuration Registers Chip-Level Registers
HEX Address Range Acronym Register Name Comments
AV DDA
Recommended Operating Conditions
DV DD12, DV DDRM, AV DDT, AV DDA
MIN NOM MAX Unit
VSS VIH VIL
Recommended Operating Conditions
VOS
DVDD33 = MIN IOL = MAX
Parameter Test CONDITIONS1 MIN TYP MAX Unit
VOH VOL
TDO DVDD33 = MIN IOH = MAX
Current DC
2 3.3-V Signal Transition Rates
1 3.3-V Signal Transition Levels
Parameter Information
Timing Parameters and Board Routing Analysis
Power-Supply Decoupling
Recommended Clock and Control Signal Transition Behavior
Power Supplies
Power-Supply Sequencing
108
Enhanced Direct Memory Access EDMA3 Controller
Edma Binary Event Name Event Description Channel
EDMA3 Device-Specific Information
EDMA3 Channel Synchronization Events
C6455 EDMA3 Channel Synchronization Events1
C6455 EDMA3 Channel Synchronization Events
EDMA3 Peripheral Register Descriptions
EDMA3 Channel Controller Registers
DCHMAP11
DCHMAP8
DCHMAP9
DCHMAP10
DCHMAP58
DCHMAP55
DCHMAP56
DCHMAP57
DRAEH6
DRAE5
DRAEH5
DRAE6
QSTAT3
QSTAT0
QSTAT1
QSTAT2
Shadow Region 0 Channel Registers
Interrupt Enable Register High
EDMA3 Transfer Controller 0 Registers
EDMA3 Parameter RAM1
EDMA3 Transfer Controller 1 Registers
EDMA3 Transfer Controller 2 Registers
121
EDMA3 Transfer Controller 3 Registers
123
Event Number Interrupt Event Description
Interrupts
Interrupt Sources and Interrupt Controller
10. C6455 System Event Mapping
TINTLO0
XINT0
RINT1
XINT1
L1PDMPA
L1PED1
Pdcint
L1PCMPA
11. Timing Requirements for External Interrupts1 see Figure
External Interrupts Electrical Data/Timing
NMI
Type Initiator
Reset Controller
Power-on Reset POR Pin
12. Reset Types
Warm Reset Reset Pin
System Reset
Max Reset
CPU Reset
Reset Priority
Srst
Reset Controller Register
Reset Type Status Register Description
Srst Mrst Wrst POR
Parameter
Reset Electrical Data/Timing
14. Timing Requirements for Reset12 3see -8and Figure
720 1000/-1000 Unit
Power-Up Timing
CLKIN1 CLKIN2 POR
Resetstat
PLL1 and PLL1 Controller
Internal Clocks and Maximum Operating Frequencies
1 PLL1 Controller Device-Specific Information
1.2 PLL1 Controller Operating Modes
1.3 PLL1 Stabilization, Lock, and Reset Times
Clock Signal MIN MAX Unit
16. PLL1 Clock Frequency Ranges
MIN TYP
17. PLL1 Stabilization, Lock, and Reset Times
18. PLL1 Controller Registers Including Reset Controller
2 PLL1 Controller Memory Map
Pllpwrdn
3 PLL1 Controller Register Descriptions
3.1 PLL1 Control Register
Pllrst
20. PLL Multiplier Control Register Pllm Field Descriptions
PLL Multiplier Control Register
Preden
PLL Pre-Divider Control Register
Ratio
D4EN
PLL Controller Divider 4 Register
D5EN
PLL Controller Divider 5 Register
Goset
PLL Controller Command Register
Gostat
PLL Controller Status Register
PLL Controller Clock Align Control Register
SYS5 SYS4
Plldiv Ratio Change Status Register
SYS5
SYS5ON SYS4ON SYS3ON SYS2ON
Sysclk Status Register
PLL Modes
29. Timing Requirements for CLKIN1 Devices123 see Figure
SYSCLK4
PLL2 and PLL2 Controller
23. PLL2 Block Diagram
Pllref Pllen =
1 PLL2 Controller Device-Specific Information
31. PLL2 Clock Frequency Ranges
1.2 PLL2 Controller Operating Modes
HEX Address Range Acronym Description
2 PLL2 Controller Memory Map
3 PLL2 Controller Register Descriptions
32. PLL2 Controller Registers
D1EN
PLL Controller Divider 1 Register
155
ALN1
SYS1
SYS1ON
39. Timing Requirements for CLKIN2123 see Figure
4 PLL2 Controller Input Clock Electrical Data/Timing
1 DDR2 Memory Controller Device-Specific Information
DDR2 Memory Controller
3 DDR2 Memory Controller Electrical Data/Timing
2 DDR2 Memory Controller Peripheral Register Descriptions
40. DDR2 Memory Controller Registers
Emifa Device-Specific Information
External Memory Interface a Emifa
41. Emifa Registers
Emifa Peripheral Register Descriptions
42. Timing Requirements for Aeclkin for EMIFA12 see Figure
Emifa Electrical Data/Timing
Aeclkin
Aeclkin AECLKOUT1
See -33and Figure
AAOE/ASOE a AAWE/ASWE a AR/W Aardy B Deasserted
Setup = Hold =
ACEx ABE70
ABA10 AED630 Read Data
ABA10 AED630
Strobe Setup = Extended Strobe
Aeclkout Aardya Asserted Deasserted
Setup time, read AEDx valid before Aeclkout high
ASADS/ASRE B AAOE/ASOE B AAWE/ASWEB
SM320C6455-EP
BE1 BE2 BE3 BE4
EA1 EA2 EA3 EA4
Write Latency =
Hold Holda
HOLD/HOLDA Timing
HHOLDAL-HOLDL Hold time, Hold low after Holda low
DSP Owns Bus
Busreq Timing
Delay time, Aeclkout high to Abusreq valid AECLKOUTx
11.1 I2C Device-Specific Information
11 I2C Peripheral
I2CEMDR
I2COAR
I2CCLKH I2CSAR
I2CXSR
51. I2C Registers
11.2 I2C Peripheral Register Descriptions
11.3 I2C Electrical Data/Timing
Standard Mode Fast Mode MIN MAX
Stop Start
SDA SCL
Start Stop
Stop Start Repeated
43. I2C Transmit Timings
54. HPI Control Registers
Host-Port Interface HPI Peripheral
HPI Device-Specific Information
HPI Peripheral Register Descriptions
HPI Electrical Data/Timing
NO.PARAMETER
See -56through Figure
HD150
HCS Has
HCNTL10
HR/W Hhwil Hstrobea
Hrdyb
HR/W Hhwil Hstrobe a
46. HPI16 Write Timing has Not Used, Tied High
47. HPI16 Write Timing has Used
48. HPI32 Read Timing has Not Used, Tied High
49. HPI32 Read Timing has Used
Input HCS input
Has input HCNTL10 Input HR/W input
Input HCS input HD310 input
51. HPI32 Write Timing has Used
Multichannel Buffered Serial Port McBSP
McBSP Device-Specific Information
58. McBSP 1 Registers
720 850 1000/-1000
McBSP Electrical Data/Timing
FIXED-POINT Digital Signal Processor
Clkx
Clks Clkr
Clks
Bit Bitn-1
Master Slave MIN MAX
MASTER3 Slave MIN MAX
Clkx FSX
Master Slave MIN
Setup time, DR valid before Clkx high 18P
Hold time, DR valid after Clkx high + 36P
198
199
Ethernet Bus
Ethernet MAC Emac
Interface Modes
Emac Device-Specific Information
Ball Number Device PIN Name
70. EMAC/MDIO Multiplexed Pins MII, RMII, and Gmii Modes
Rmii
Interface Mode Clocking
71. Ethernet MAC Emac Control Registers
Emac Peripheral Register Descriptions
RX7FREEBUFFER
Macconfig
Softreset
RX6FREEBUFFER
HEX Address Range Acronym
72. Emac Statistics Registers
74. Emac Descriptor Memory
73. Emac Control Module Registers
02C8 2000 02C8 3FFF Emac Descriptor Memory
Mtclk
Emac Electrical Data/Timing
Mbps Gmii Only
Mrclk Input
MRXD3−MRXD0
Gmtclk
Output
Mrclk Input MRXD7−MRXD4GMII only
Gmtclk Output
Mtclk Input MTXD7−MTXD4GMII only
MTXD3−MTXD0
Mtxen Outputs
Rmrefclk Input
Emac Rmii Electrical Data/Timing
Mrxer Inputs 720 1000/-1000 Unit
MRXD1-MRXD0 Mcrsdv
Emac Rgmii Electrical Data/Timing
Cycle time, TXC Mbps 40*t cTXC 60*t cTXC
70. Emac Transmit Interface Timing Rgmii OperationAB
Mdio Device-Specific Information
Management Data Input/Output Mdio
Mdio Peripheral Register Descriptions 89. Mdio Registers
Mdio output
Delay time, Mdclk low to Mdio data output valid 100
Mdclk
Mdio input
92. Timer 0 Registers
Timers
Timers Device-Specific Information
Timers Peripheral Register Descriptions
94. Timing Requirements for Timer Inputs1 see Figure
Timers Electrical Data/Timing
TINPLx TOUTLx
96. VCP2 Registers
Enhanced Viterbi-Decoder Coprocessor VCP2
16.1 VCP2 Device-Specific Information
16.2 VCP2 Peripheral Register Descriptions
Tbsd
Enhanced Turbo Decoder Coprocessor TCP2
17.1 TCP2 Device-Specific Information
Tbhd
97. TCP2 Registers
17.2 TCP2 Peripheral Register Descriptions
PCI Device-Specific Information
98. Default Values for PCI Configuration Registers
Register Default Value
Peripheral Component Interconnect PCI
PCI Peripheral Register Descriptions
99. PCI Configuration Registers
100. PCI Back End Configuration Registers
101. DSP-toPCI Address Translation Registers
103. PCI External Memory Space
102. PCI Hook Configuration Registers
HEX Address Offset Acronym Register Name
4AFF Ffff
48FF Ffff
49FF Ffff
4A7F Ffff
PCI Electrical Data/Timing
105. Utopia Data Queues Receive and Transmit Registers
Utopia Device-Specific Information
Utopia Peripheral Register Descriptions
104. Utopia Registers
Urclk
Utopia Electrical Data/Timing
106. Timing Requirements for UXCLK1 see Figure
Uxclk
UXADDR40
Uxclk UXDATA70
Uxclav Uxenb Uxsoc
P48 0x1F
Urclk URDATA70 URADDR40 N Urclav Urenb Ursoc
112. RapidIO Control Registers
Serial RapidIO Srio Port
Serial RapidIO Device-Specific Information
Serial RapidIO Peripheral Register Descriptions
RIOBLK3ENSTAT
RIOBLK2EN
RIOBLK2ENSTAT
RIOBLK3EN
RIODOORBELL3ICCR
RIODOORBELL2ICSR
RIODOORBELL2ICCR
RIODOORBELL3ICSR
RIOINTDST0DECODE
Rioerrrstevnticrr
RIOERRRSTEVNTICRR2
RIOERRRSTEVNTICRR3
RIOLSU4REG3
RIOLSU4REG0
RIOLSU4REG1
RIOLSU4REG2
RIOQUEUE7RXDMAHDP
RIOQUEUE4RXDMAHDP
RIOQUEUE5RXDMAHDP
RIOQUEUE6RXDMAHDP
RIORXUMAPH1
RIORXUMAPL0
RIORXUMAPH0
RIORXUMAPL1
RapidIO Peripheral-Specific Registers
Riohostbaseidlock
Riolclcfghbar
Riolclcfgbar
Riobaseid
RIOSP0RATEEN
Rioctrlcapt
Riopwtgtid
RIOSP0ERRDET
Serial RapidIO Electrical Data/Timing
245
113. Gpio Registers
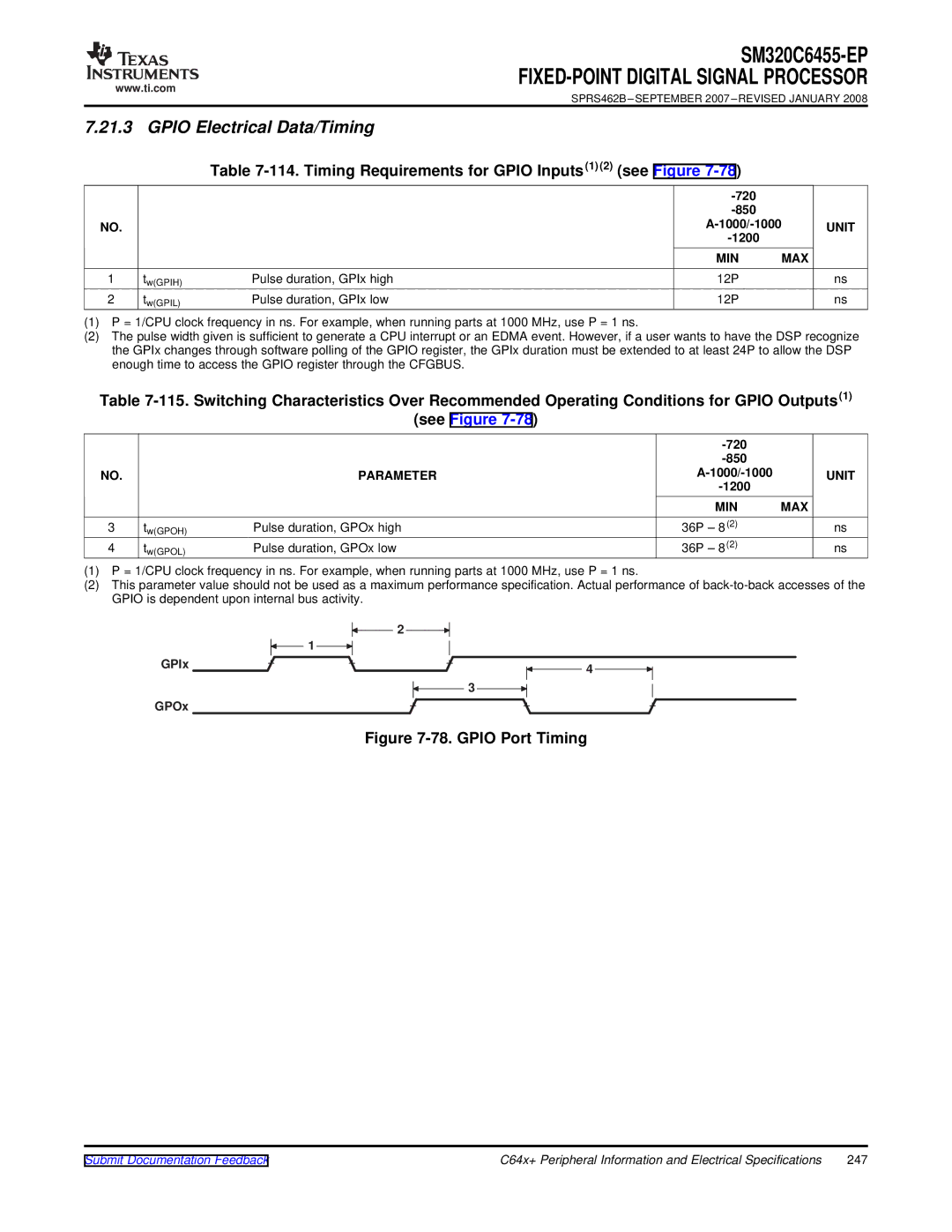
General-Purpose Input/Output Gpio
Gpio Device-Specific Information
Gpio Peripheral Register Descriptions
Pulse duration, GPOx low 36P 8
Gpio Electrical Data/Timing
114. Timing Requirements for Gpio Inputs12 see Figure
Pulse duration, GPOx high 36P 8
Advanced Event Triggering AET
Emulation Features and Capability
Trace
116. Timing Requirements for Jtag Test Port see Figure
Delay time, TCK low to TDO valid
Ieee 1149.1 Jtag
Jtag Device-Specific Information
Added 0.83 ns C6455-1200 1.2-GHz CPU Cycle Time
Revision History
C6455 Revision History
See ADDITIONS/MODIFICATIONS/DELETIONS
AIR Flow
Thermal Resistance Characteristics S-PBGA Package ZTZ/GTZ
Thermal Data
Packaging Information
MSL Peak Temp
Orderable Device Status Package Pins Package Eco Plan
Qty
Page
DSP
Products Applications
Rfid