6F3B0253
7. Instructions
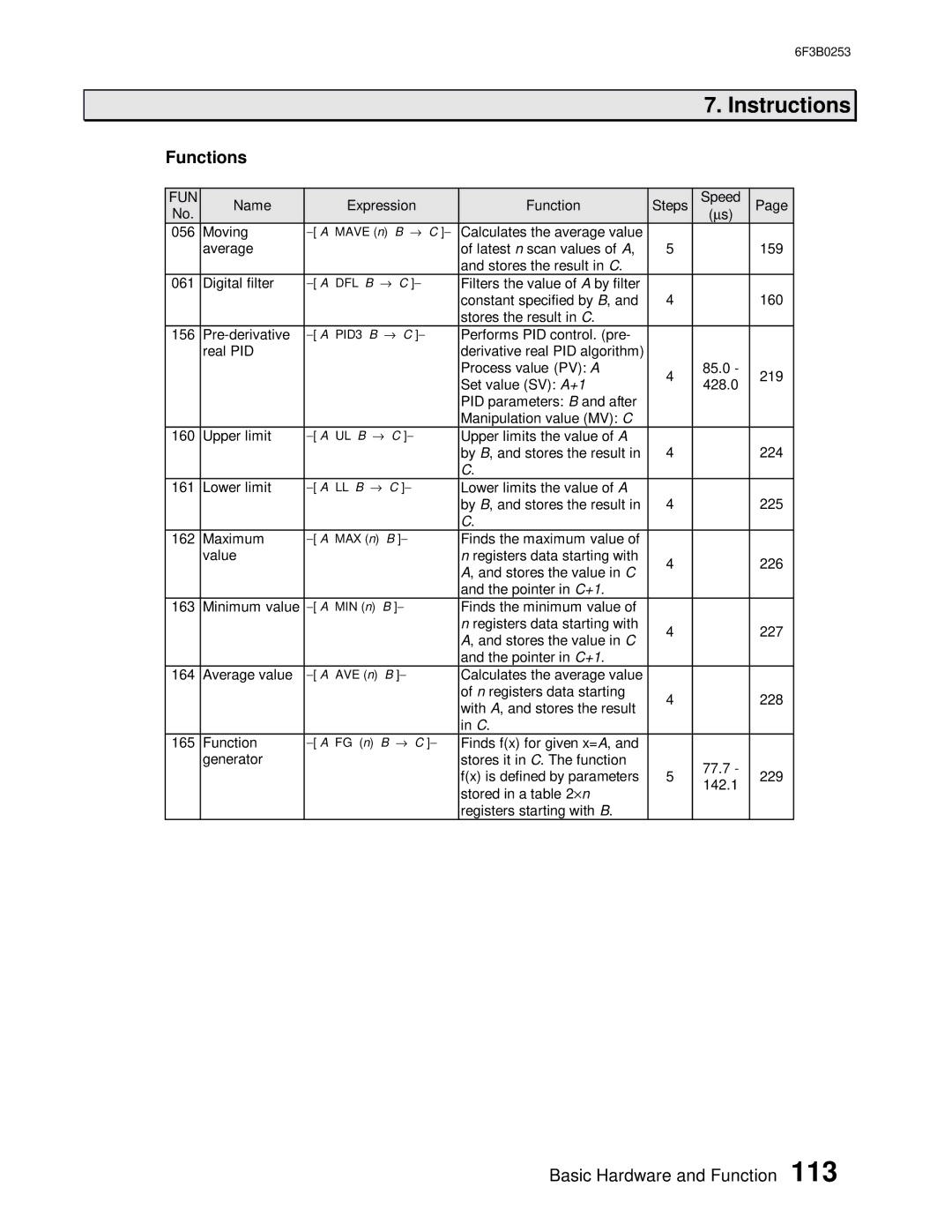
Functions
FUN | Name | Expression | Function | Steps | Speed | Page | |||
No. |
|
|
|
|
|
|
| (∝ s) |
|
056 | Moving | − [ A MAVE (n) B → C ]− | Calculates the average value |
|
|
| |||
| average |
|
|
|
| of latest n scan values of A, | 5 |
| 159 |
|
|
|
|
|
| and stores the result in C. |
|
|
|
061 | Digital filter | − [ A DFL B → | C ]− | Filters the value of A by filter |
|
|
| ||
|
|
|
|
|
| constant specified by B, and | 4 |
| 160 |
|
|
|
|
|
| stores the result in C. |
|
|
|
156 | − [ A PID3 B → | C ]− | Performs PID control. (pre- |
|
|
| |||
| real PID |
|
|
|
| derivative real PID algorithm) |
|
|
|
|
|
|
|
|
| Process value (PV): A | 4 | 85.0 - | 219 |
|
|
|
|
|
| Set value (SV): A+1 | 428.0 | ||
|
|
|
|
|
|
|
| ||
|
|
|
|
|
| PID parameters: B and after |
|
|
|
|
|
|
|
|
| Manipulation value (MV): C |
|
|
|
160 | Upper limit | − [ A UL | B → | C ]− | Upper limits the value of A |
|
|
| |
|
|
|
|
|
| by B, and stores the result in | 4 |
| 224 |
|
|
|
|
|
| C. |
|
|
|
161 | Lower limit | − [ A LL | B → | C ]− | Lower limits the value of A |
|
|
| |
|
|
|
|
|
| by B, and stores the result in | 4 |
| 225 |
|
|
|
|
|
| C. |
|
|
|
162 | Maximum | − [ A MAX (n) | B ]− | Finds the maximum value of |
|
|
| ||
| value |
|
|
|
| n registers data starting with | 4 |
| 226 |
|
|
|
|
|
| A, and stores the value in C |
| ||
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
| and the pointer in C+1. |
|
|
|
163 | Minimum value | − [ A MIN (n) | B ]− | Finds the minimum value of |
|
|
| ||
|
|
|
|
|
| n registers data starting with | 4 |
| 227 |
|
|
|
|
|
| A, and stores the value in C |
| ||
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
| and the pointer in C+1. |
|
|
|
164 | Average value | − [ A AVE (n) | B ]− | Calculates the average value |
|
|
| ||
|
|
|
|
|
| of n registers data starting | 4 |
| 228 |
|
|
|
|
|
| with A, and stores the result |
| ||
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
| in C. |
|
|
|
165 | Function | − [ A FG | (n) | B → | C ]− | Finds f(x) for given x=A, and |
|
|
|
| generator |
|
|
|
| stores it in C. The function |
| 77.7 - |
|
|
|
|
|
|
| f(x) is defined by parameters | 5 | 229 | |
|
|
|
|
|
| 142.1 | |||
|
|
|
|
|
| stored in a table 2⋅ n |
|
| |
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
| registers starting with B. |
|
|
|
Basic Hardware and Function 113