6F3B0253
7. Instructions
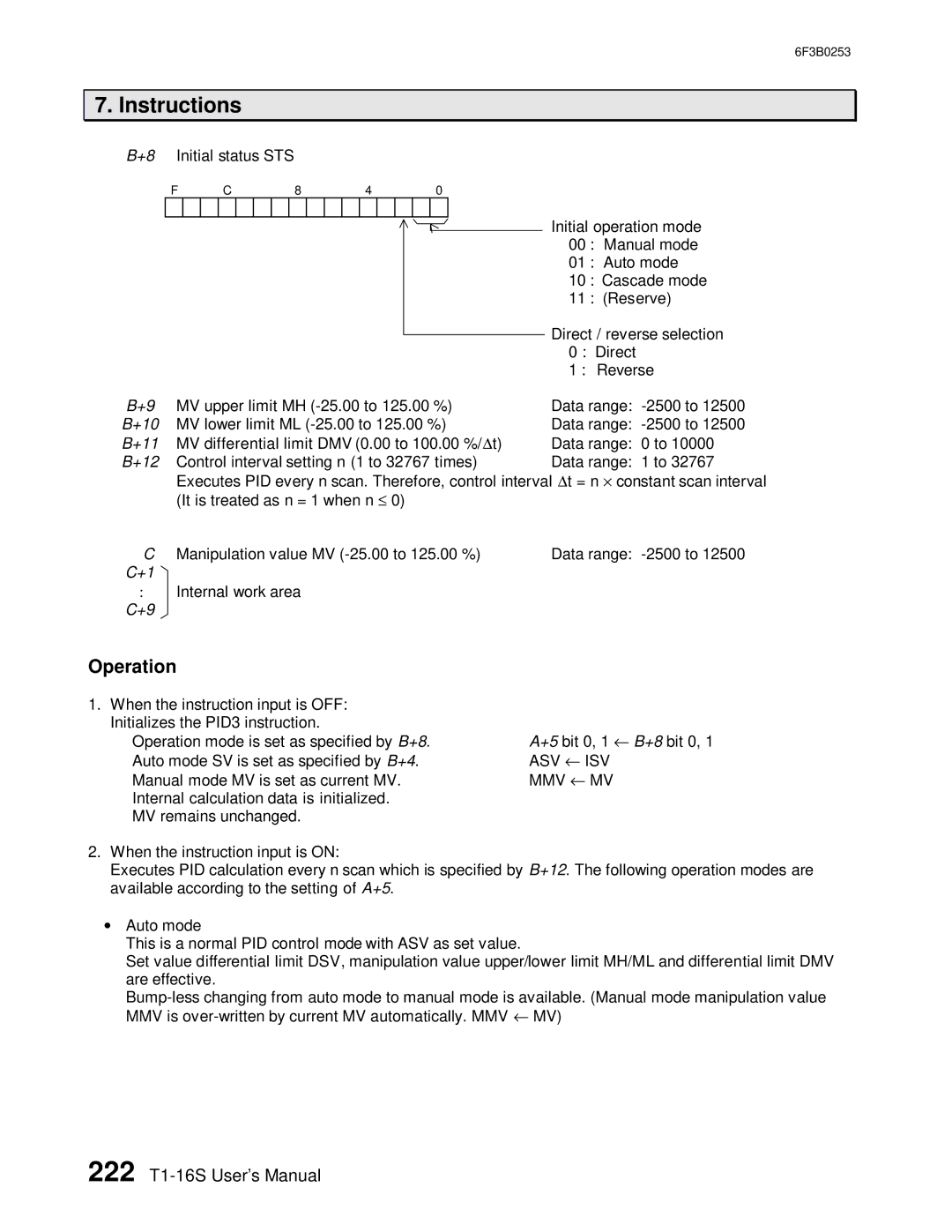
B+8 Initial status STS
F |
|
| C | 8 | 4 | 0 | |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Initial operation mode 00 : Manual mode
01 : Auto mode
10 : Cascade mode
11 : (Reserve)
Direct / reverse selection
|
| 0 : Direct |
|
|
| 1 : Reverse | |
B+9 | MV upper limit MH | Data range: | |
B+10 | MV lower limit ML | Data range: | |
B+11 | MV differential limit DMV (0.00 to 100.00 %/∆ t) | Data range: | 0 to 10000 |
B+12 | Control interval setting n (1 to 32767 times) | Data range: | 1 to 32767 |
| Executes PID every n scan. Therefore, control interval ∆ t = n ⋅ constant scan interval | ||
| (It is treated as n = 1 when n ≤ 0) |
|
|
C | Manipulation value MV | Data range: | |
C+1 |
|
|
|
:Internal work area
C+9
Operation
1. When the instruction input is OFF: |
|
|
Initializes the PID3 instruction. | A+5 bit 0, 1 ← B+8 bit 0, 1 | |
Operation mode is set as specified by B+8. | ||
Auto mode SV is set as specified by B+4. | ASV ← | ISV |
Manual mode MV is set as current MV. | MMV ← | MV |
Internal calculation data is initialized.
MV remains unchanged.
2.When the instruction input is ON:
Executes PID calculation every n scan which is specified by B+12. The following operation modes are available according to the setting of A+5.
•Auto mode
This is a normal PID control mode with ASV as set value.
Set value differential limit DSV, manipulation value upper/lower limit MH/ML and differential limit DMV are effective.
MMV is