11 Intervention in the Course of Program Execution
11.3 Intervention by Means of Manual Handle in Automatic Operation
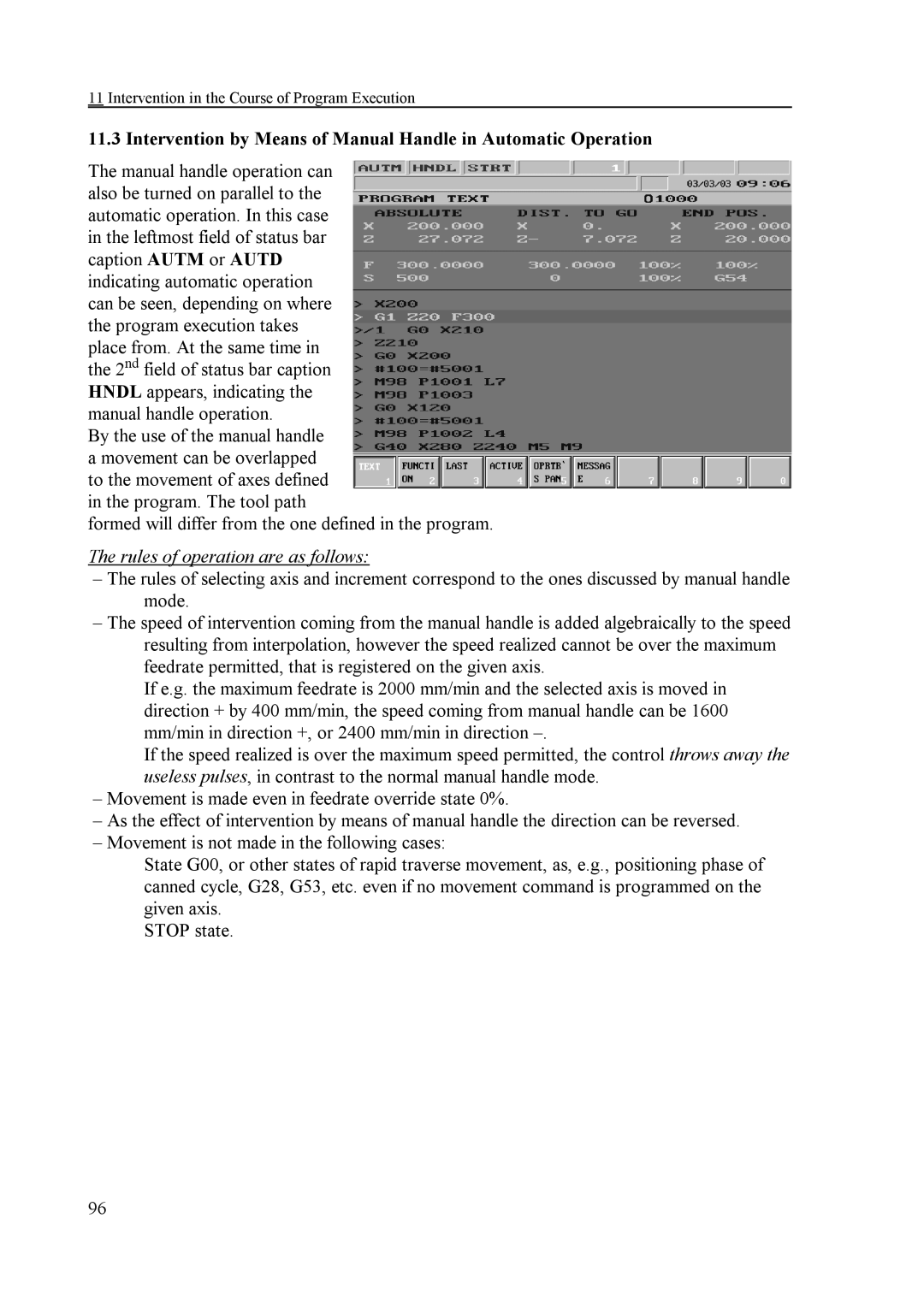
The manual handle operation can also be turned on parallel to the automatic operation. In this case in the leftmost field of status bar caption AUTM or AUTD indicating automatic operation can be seen, depending on where the program execution takes place from. At the same time in the 2nd field of status bar caption HNDL appears, indicating the manual handle operation.
By the use of the manual handle a movement can be overlapped to the movement of axes defined in the program. The tool path
formed will differ from the one defined in the program.
The rules of operation are as follows:
–The rules of selecting axis and increment correspond to the ones discussed by manual handle mode.
–The speed of intervention coming from the manual handle is added algebraically to the speed resulting from interpolation, however the speed realized cannot be over the maximum feedrate permitted, that is registered on the given axis.
If e.g. the maximum feedrate is 2000 mm/min and the selected axis is moved in direction + by 400 mm/min, the speed coming from manual handle can be 1600 mm/min in direction +, or 2400 mm/min in direction
If the speed realized is over the maximum speed permitted, the control throws away the useless pulses, in contrast to the normal manual handle mode.
–Movement is made even in feedrate override state 0%.
–As the effect of intervention by means of manual handle the direction can be reversed.
–Movement is not made in the following cases:
State G00, or other states of rapid traverse movement, as, e.g., positioning phase of canned cycle, G28, G53, etc. even if no movement command is programmed on the given axis.
STOP state.
96