Chapter 4 Parameters
Targeted + |
|
|
|
|
|
|
|
|
|
| + |
|
|
| Limit of PID |
|
| One Time | Frequency | ||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
| P |
|
|
| I |
|
| Upper Bound + | Output |
|
| ||||||||||||||
value |
|
|
|
|
|
|
|
|
| of Integral |
|
|
|
| Delay |
|
| Command | |||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||
- |
|
| Pr.117 |
|
|
| Pr.118 |
| Value | + |
|
|
| Frequency |
|
| Pr.121 |
| |||||||
|
|
|
|
|
|
|
|
|
|
|
|
| Pr.120 |
|
|
| Pr.122 |
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
|
|
| D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| Pr.119 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Definition of |
|
|
|
| Selection of |
| |||||
|
|
|
|
|
|
|
|
| LPF |
|
|
| Detection Value |
|
|
|
| Detection value |
| ||||||
|
|
|
|
|
|
|
|
|
|
| AVI(Pr.128~Pr.130) |
|
|
| Pr.116 |
| |||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||
|
|
|
|
|
|
|
|
| Pr.135 |
|
| ACI(Pr.131~Pr.133) |
|
|
| ||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||
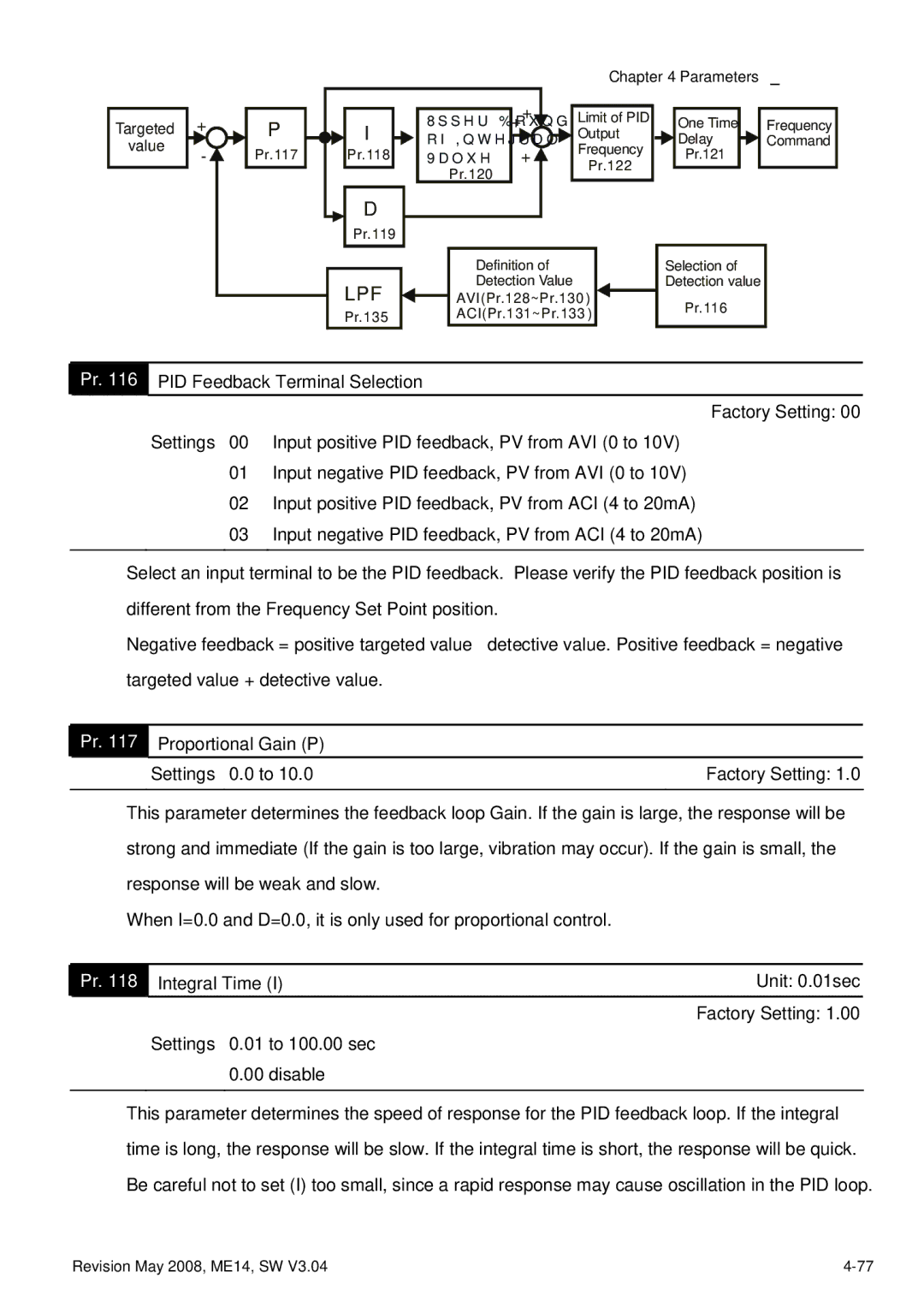
Pr. 116 | PID Feedback Terminal Selection |
Factory Setting: 00
Settings 00 Input positive PID feedback, PV from AVI (0 to 10V)
01Input negative PID feedback, PV from AVI (0 to 10V)
02Input positive PID feedback, PV from ACI (4 to 20mA)
03Input negative PID feedback, PV from ACI (4 to 20mA)
Select an input terminal to be the PID feedback. Please verify the PID feedback position is different from the Frequency Set Point position.
Negative feedback = positive targeted value – detective value. Positive feedback = negative targeted value + detective value.
![]() Proportional Gain (P)
Proportional Gain (P)
Settings 0.0 to 10.0Factory Setting: 1.0
This parameter determines the feedback loop Gain. If the gain is large, the response will be strong and immediate (If the gain is too large, vibration may occur). If the gain is small, the response will be weak and slow.
When I=0.0 and D=0.0, it is only used for proportional control.
Pr. 118 | Integral Time (I) |
Unit: 0.01sec
Factory Setting: 1.00
Settings 0.01 to 100.00 sec 0.00 disable
This parameter determines the speed of response for the PID feedback loop. If the integral time is long, the response will be slow. If the integral time is short, the response will be quick. Be careful not to set (I) too small, since a rapid response may cause oscillation in the PID loop.
Revision May 2008, ME14, SW V3.04 |