5 How Motion
Works
5.1 Introduction
The
This section will concentrate on how the different motion objects work, and not on how they are configured using PowerTools Pro. For more information on how to configure the motion objects in PowerTools Pro, see “Configuring an Application” on page 33.
5.2 Jog
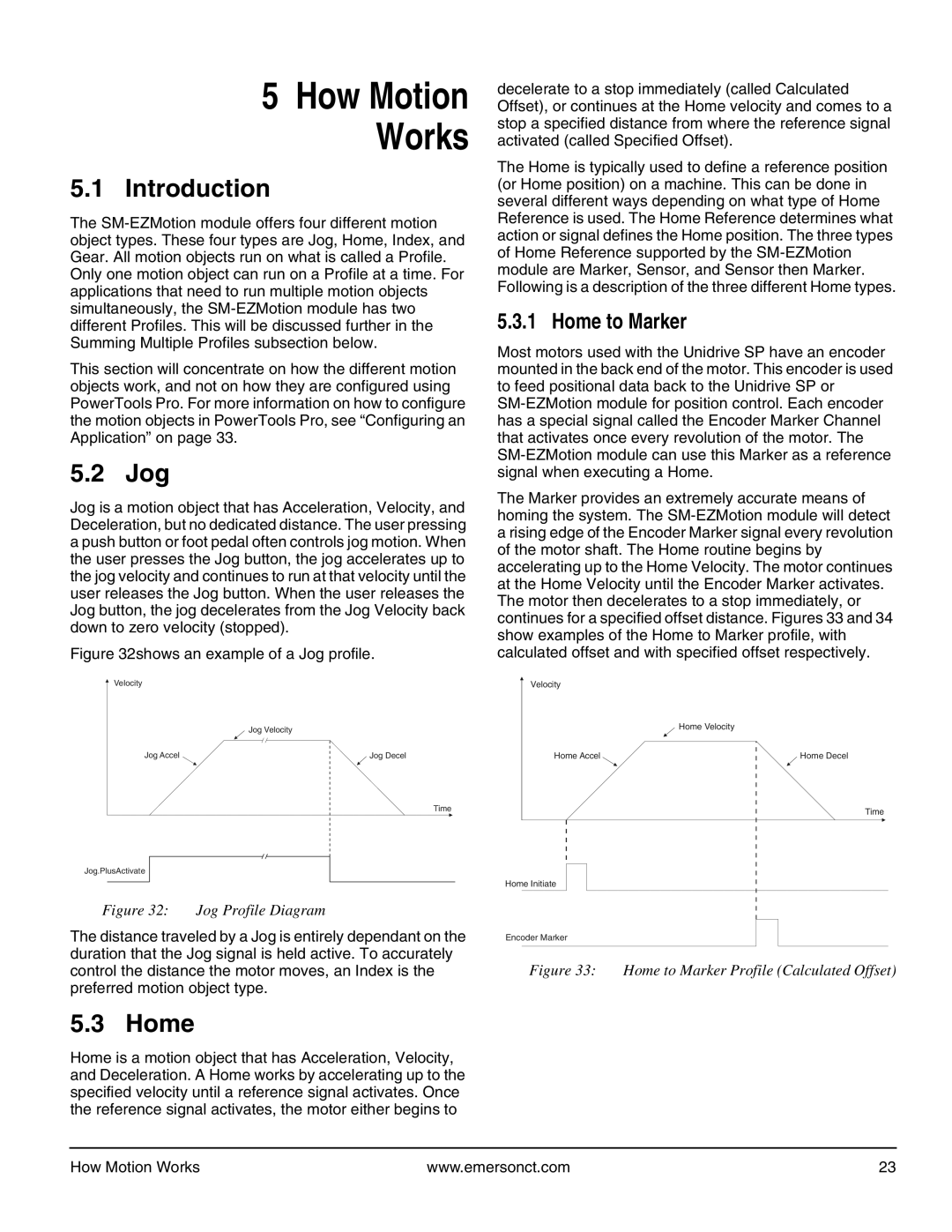
Jog is a motion object that has Acceleration, Velocity, and Deceleration, but no dedicated distance. The user pressing a push button or foot pedal often controls jog motion. When the user presses the Jog button, the jog accelerates up to the jog velocity and continues to run at that velocity until the user releases the Jog button. When the user releases the Jog button, the jog decelerates from the Jog Velocity back down to zero velocity (stopped).
Figure 32shows an example of a Jog profile.
Velocity |
|
| Jog Velocity |
Jog Accel | Jog Decel |
| Time |
decelerate to a stop immediately (called Calculated Offset), or continues at the Home velocity and comes to a stop a specified distance from where the reference signal activated (called Specified Offset).
The Home is typically used to define a reference position (or Home position) on a machine. This can be done in several different ways depending on what type of Home Reference is used. The Home Reference determines what action or signal defines the Home position. The three types of Home Reference supported by the
5.3.1 Home to Marker
Most motors used with the Unidrive SP have an encoder mounted in the back end of the motor. This encoder is used to feed positional data back to the Unidrive SP or
The Marker provides an extremely accurate means of homing the system. The
Velocity
Home Velocity
Home Accel | Home Decel |
Time
Jog.PlusActivate
Figure 32: Jog Profile Diagram
The distance traveled by a Jog is entirely dependant on the duration that the Jog signal is held active. To accurately control the distance the motor moves, an Index is the preferred motion object type.
5.3 Home
Home is a motion object that has Acceleration, Velocity, and Deceleration. A Home works by accelerating up to the specified velocity until a reference signal activates. Once the reference signal activates, the motor either begins to
Home Initiate
Encoder Marker
Figure 33: Home to Marker Profile (Calculated Offset)
How Motion Works | www.emersonct.com | 23 |