Switch that is active.
7.5.2 Home View
Figure 94: | Jog Activate |
![]()
![]()
![]() 0
0 ![]()
![]()
![]()
![]()
![]()
![]()
Figure 95: Jog Select Usage
If the Jog direction is reversed, the Jog.#.Decel value will be used to decelerate the motor to zero speed and then the Jog.#.Accel will be used to accelerate to the new (opposite sign) velocity.
Note
The Jog destinations cannot be initiated when any other motion type (homing, indexing, or programs) is in progress.
If both jog input functions are "On" there is no motion after a jog deceleration (they effectively cancel each other). The drive's display will show "R", for ready.
If the device is jogging with the Jog.PlusActivate destination active and the Jog.MinusActivate destination activates, the motor will behave the same as if it would if Jog.PlusActivate just deactivated.
The Stop destination (found under the Ramps group in the Assignments view) will override the Jog operation and decelerate the motor to zero speed at the stop deceleration rate.
Jog Motion can be used to jog off of a Travel Limit Switch. Use the Jog Initiate for the opposite direction of the Limit
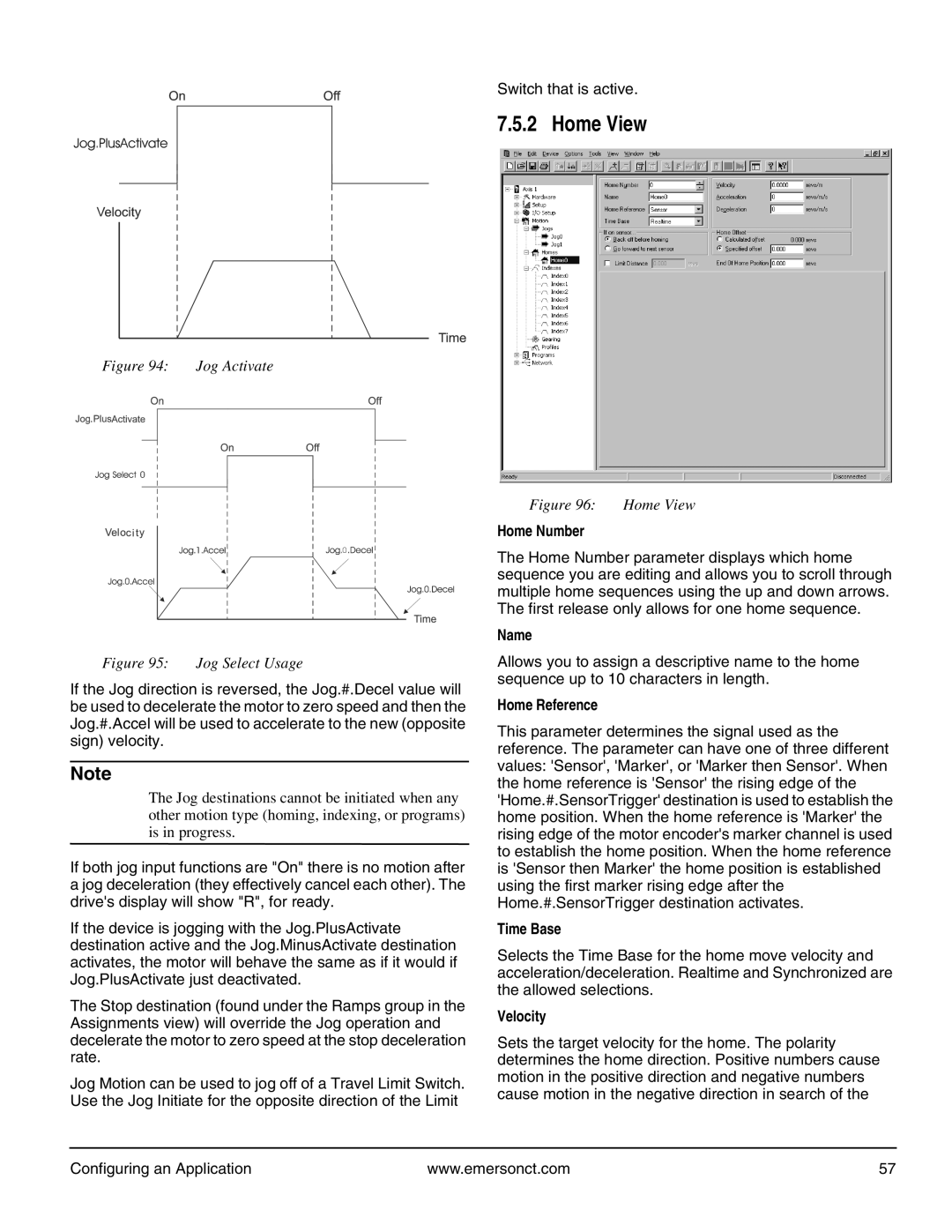
Figure 96: Home View
Home Number
The Home Number parameter displays which home sequence you are editing and allows you to scroll through multiple home sequences using the up and down arrows. The first release only allows for one home sequence.
Name
Allows you to assign a descriptive name to the home sequence up to 10 characters in length.
Home Reference
This parameter determines the signal used as the reference. The parameter can have one of three different values: 'Sensor', 'Marker', or 'Marker then Sensor'. When the home reference is 'Sensor' the rising edge of the 'Home.#.SensorTrigger' destination is used to establish the home position. When the home reference is 'Marker' the rising edge of the motor encoder's marker channel is used to establish the home position. When the home reference is 'Sensor then Marker' the home position is established using the first marker rising edge after the Home.#.SensorTrigger destination activates.
Time Base
Selects the Time Base for the home move velocity and acceleration/deceleration. Realtime and Synchronized are the allowed selections.
Velocity
Sets the target velocity for the home. The polarity determines the home direction. Positive numbers cause motion in the positive direction and negative numbers cause motion in the negative direction in search of the
Configuring an Application | www.emersonct.com | 57 |