Destinations
Home.#.Initiate - The Home.#.Initiate destination is used to initiate the home function. The Home is initiated on the rising edge of this function. The device will not initiate a Home if there is an Index, Jog, or Program in progress, or if the Stop destination is active or if a travel limit is active.
Home.#.SensorTrigger - This destination is required to be used if you are homing to a sensor. This destination is edge sensitive. The home position is determined when the Home Sensor destination is activated.
If the device receives a Home.#.Initiate input while the Home.#.SensorTrigger is active, you can choose to have the motor
If debounce is used on the hardware input that the Home.#.SensorTrigger is assigned to, the debounce determines the length of time the input must be active to be considered a valid input.
The rising edge of the sensor is still used for the reference position. This maintains accuracy while providing the ability to ignore false inputs.
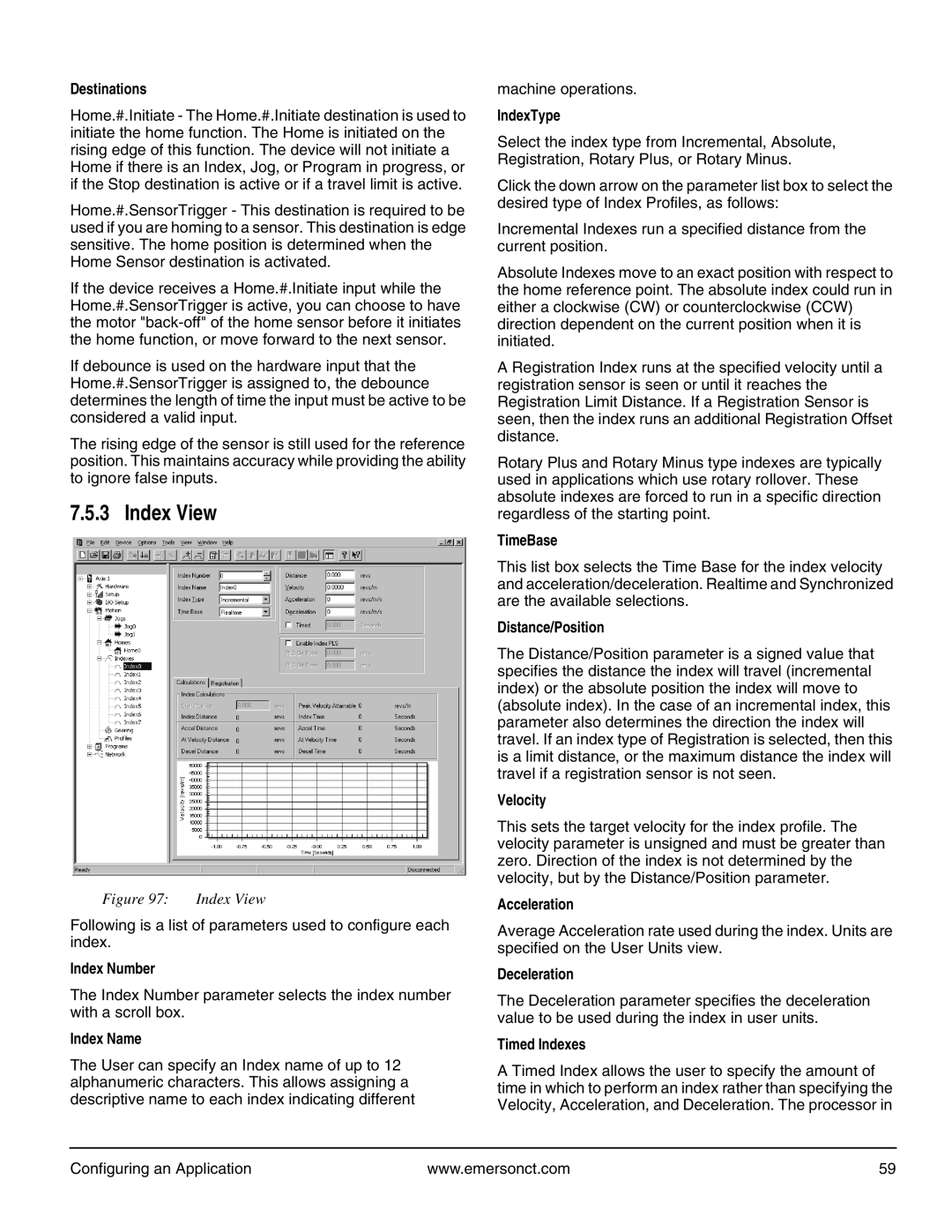
7.5.3 Index View
Figure 97: | Index View |
Following is a list of parameters used to configure each index.
Index Number
The Index Number parameter selects the index number with a scroll box.
Index Name
The User can specify an Index name of up to 12 alphanumeric characters. This allows assigning a descriptive name to each index indicating different
machine operations.
IndexType
Select the index type from Incremental, Absolute, Registration, Rotary Plus, or Rotary Minus.
Click the down arrow on the parameter list box to select the desired type of Index Profiles, as follows:
Incremental Indexes run a specified distance from the current position.
Absolute Indexes move to an exact position with respect to the home reference point. The absolute index could run in either a clockwise (CW) or counterclockwise (CCW) direction dependent on the current position when it is initiated.
A Registration Index runs at the specified velocity until a registration sensor is seen or until it reaches the Registration Limit Distance. If a Registration Sensor is seen, then the index runs an additional Registration Offset distance.
Rotary Plus and Rotary Minus type indexes are typically used in applications which use rotary rollover. These absolute indexes are forced to run in a specific direction regardless of the starting point.
TimeBase
This list box selects the Time Base for the index velocity and acceleration/deceleration. Realtime and Synchronized are the available selections.
Distance/Position
The Distance/Position parameter is a signed value that specifies the distance the index will travel (incremental index) or the absolute position the index will move to (absolute index). In the case of an incremental index, this parameter also determines the direction the index will travel. If an index type of Registration is selected, then this is a limit distance, or the maximum distance the index will travel if a registration sensor is not seen.
Velocity
This sets the target velocity for the index profile. The velocity parameter is unsigned and must be greater than zero. Direction of the index is not determined by the velocity, but by the Distance/Position parameter.
Acceleration
Average Acceleration rate used during the index. Units are specified on the User Units view.
Deceleration
The Deceleration parameter specifies the deceleration value to be used during the index in user units.
Timed Indexes
A Timed Index allows the user to specify the amount of time in which to perform an index rather than specifying the Velocity, Acceleration, and Deceleration. The processor in
Configuring an Application | www.emersonct.com | 59 |