Velocity
Index Accel
Time
2 Seconds
Figure 50: Timed Index Profile
In some cases, an index time is calculated based on other parameters in a user program. To avoid possible machine damage, the user can specify maximum values for accel, velocity, and decel. Therefore, when the
5.5 Gear
The Gear motion profile is used to slave the motion of the motor to the motion of a master axis at a specified ratio. Gearing is often referred to as "electronic line shafting" or "electronic gearing". To gear a follower axis to a master axis, a ratio (called the gear ratio) must be specified. The Gear Ratio defines the relationship between the master and follower motion.
The ratio is calculated as follows:
# of Follower Distance Units
Gear Ratio =
1 Master Distance Unit
The ratio is the number of follower distance units to move the motor per master distance unit of travel. Follower Distance Units are configured on the User Units view. Master Distance Units are configured on the Master Setup screen.
The gear ratio can be positive or negative and is a signed
By default, gearing does not use acceleration or deceleration ramps with respect to the master encoder. This means that once gearing is activated, peak torque is available to try to achieve the specified gear ratio. Therefore, if the master axis is in motion when gearing is activated, the control loop will attempt to achieve the programmed ratio within one update without programmed acceleration. Analogously, when gearing is deactivated, the motor will use peak torque to bring the motor to a stop
without a deceleration ramp.
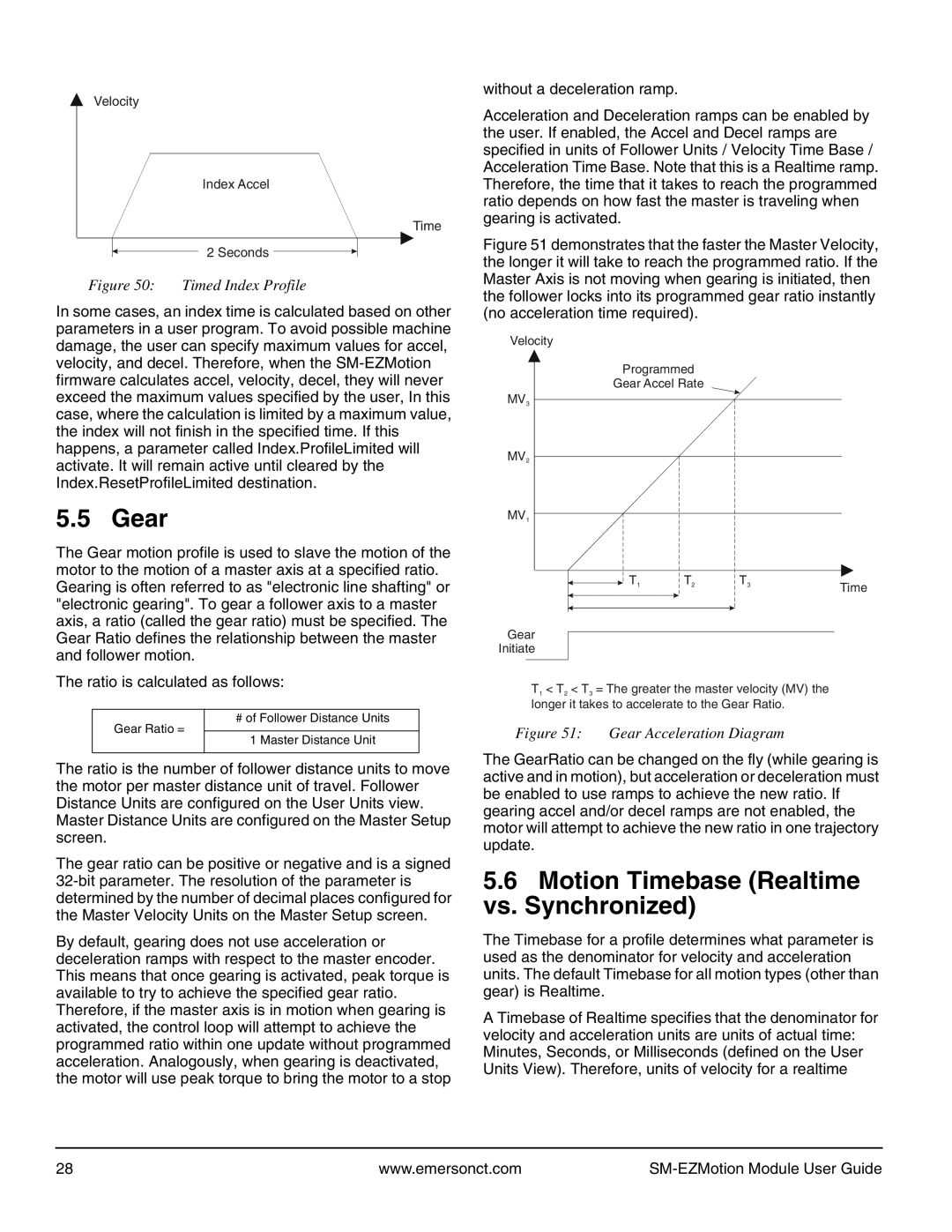
Acceleration and Deceleration ramps can be enabled by the user. If enabled, the Accel and Decel ramps are specified in units of Follower Units / Velocity Time Base / Acceleration Time Base. Note that this is a Realtime ramp. Therefore, the time that it takes to reach the programmed ratio depends on how fast the master is traveling when gearing is activated.
Figure 51 demonstrates that the faster the Master Velocity, the longer it will take to reach the programmed ratio. If the Master Axis is not moving when gearing is initiated, then the follower locks into its programmed gear ratio instantly (no acceleration time required).
Velocity
Programmed
Gear Accel Rate
MV3
MV2
MV1
| T1 | T2 | T3 | Time |
| ||||
|
|
|
| |
|
|
|
|
|
Gear
Initiate
T1 < T2 < T3 = The greater the master velocity (MV) the longer it takes to accelerate to the Gear Ratio.
Figure 51: Gear Acceleration Diagram
The GearRatio can be changed on the fly (while gearing is active and in motion), but acceleration or deceleration must be enabled to use ramps to achieve the new ratio. If gearing accel and/or decel ramps are not enabled, the motor will attempt to achieve the new ratio in one trajectory update.
5.6Motion Timebase (Realtime vs. Synchronized)
The Timebase for a profile determines what parameter is used as the denominator for velocity and acceleration units. The default Timebase for all motion types (other than gear) is Realtime.
A Timebase of Realtime specifies that the denominator for velocity and acceleration units are units of actual time: Minutes, Seconds, or Milliseconds (defined on the User Units View). Therefore, units of velocity for a realtime
28 | www.emersonct.com |
|