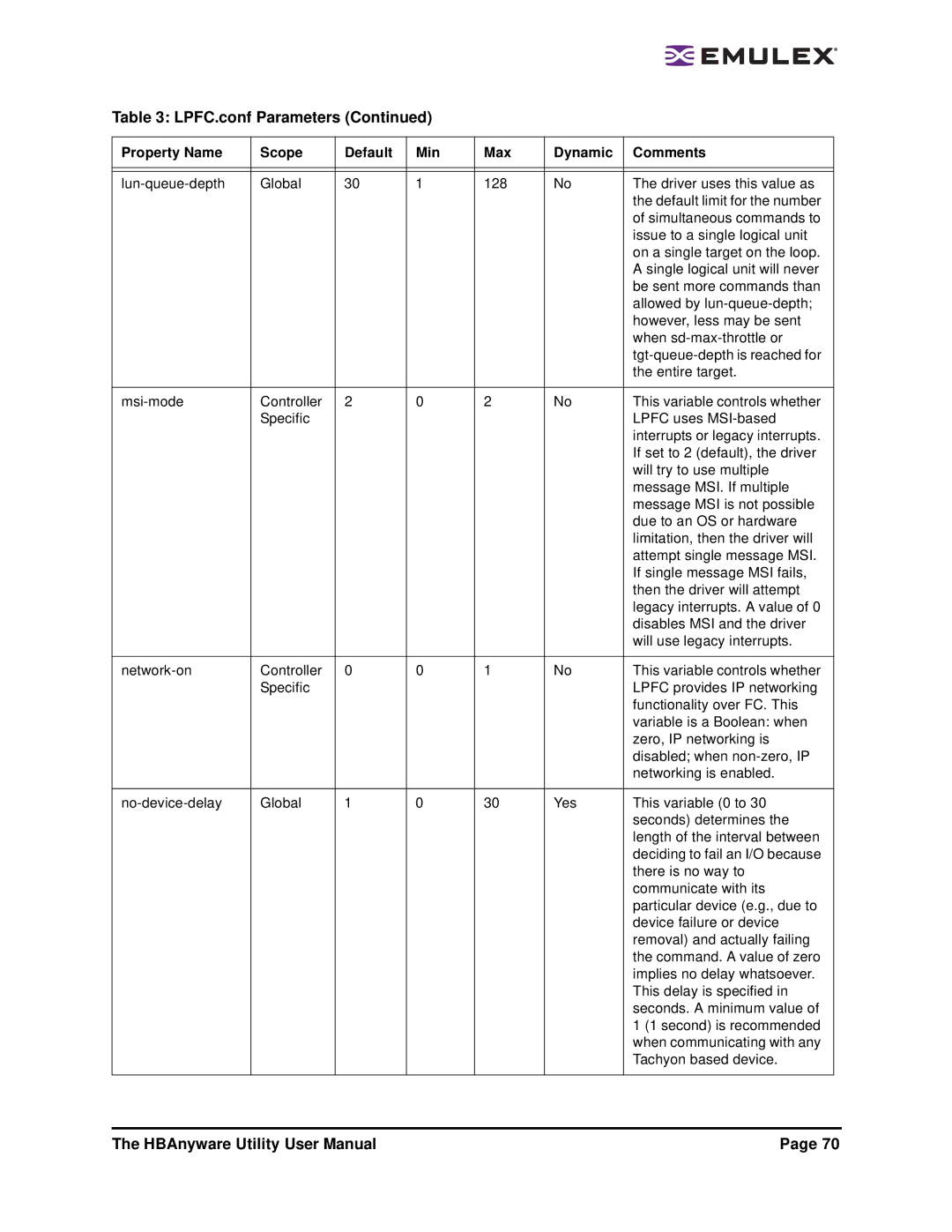
Table 3: LPFC.conf Parameters (Continued)
Property Name | Scope | Default | Min | Max | Dynamic | Comments |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Global | 30 | 1 | 128 | No | The driver uses this value as | |
|
|
|
|
|
| the default limit for the number |
|
|
|
|
|
| of simultaneous commands to |
|
|
|
|
|
| issue to a single logical unit |
|
|
|
|
|
| on a single target on the loop. |
|
|
|
|
|
| A single logical unit will never |
|
|
|
|
|
| be sent more commands than |
|
|
|
|
|
| allowed by |
|
|
|
|
|
| however, less may be sent |
|
|
|
|
|
| when |
|
|
|
|
|
| |
|
|
|
|
|
| the entire target. |
|
|
|
|
|
|
|
Controller | 2 | 0 | 2 | No | This variable controls whether | |
| Specific |
|
|
|
| LPFC uses |
|
|
|
|
|
| interrupts or legacy interrupts. |
|
|
|
|
|
| If set to 2 (default), the driver |
|
|
|
|
|
| will try to use multiple |
|
|
|
|
|
| message MSI. If multiple |
|
|
|
|
|
| message MSI is not possible |
|
|
|
|
|
| due to an OS or hardware |
|
|
|
|
|
| limitation, then the driver will |
|
|
|
|
|
| attempt single message MSI. |
|
|
|
|
|
| If single message MSI fails, |
|
|
|
|
|
| then the driver will attempt |
|
|
|
|
|
| legacy interrupts. A value of 0 |
|
|
|
|
|
| disables MSI and the driver |
|
|
|
|
|
| will use legacy interrupts. |
|
|
|
|
|
|
|
Controller | 0 | 0 | 1 | No | This variable controls whether | |
| Specific |
|
|
|
| LPFC provides IP networking |
|
|
|
|
|
| functionality over FC. This |
|
|
|
|
|
| variable is a Boolean: when |
|
|
|
|
|
| zero, IP networking is |
|
|
|
|
|
| disabled; when |
|
|
|
|
|
| networking is enabled. |
|
|
|
|
|
|
|
Global | 1 | 0 | 30 | Yes | This variable (0 to 30 | |
|
|
|
|
|
| seconds) determines the |
|
|
|
|
|
| length of the interval between |
|
|
|
|
|
| deciding to fail an I/O because |
|
|
|
|
|
| there is no way to |
|
|
|
|
|
| communicate with its |
|
|
|
|
|
| particular device (e.g., due to |
|
|
|
|
|
| device failure or device |
|
|
|
|
|
| removal) and actually failing |
|
|
|
|
|
| the command. A value of zero |
|
|
|
|
|
| implies no delay whatsoever. |
|
|
|
|
|
| This delay is specified in |
|
|
|
|
|
| seconds. A minimum value of |
|
|
|
|
|
| 1 (1 second) is recommended |
|
|
|
|
|
| when communicating with any |
|
|
|
|
|
| Tachyon based device. |
|
|
|
|
|
|
|
The HBAnyware Utility User Manual | Page 70 |