Advanced Operations
6.3.3.7 Function set to PWM CONTROL/PID CONTROL working mode
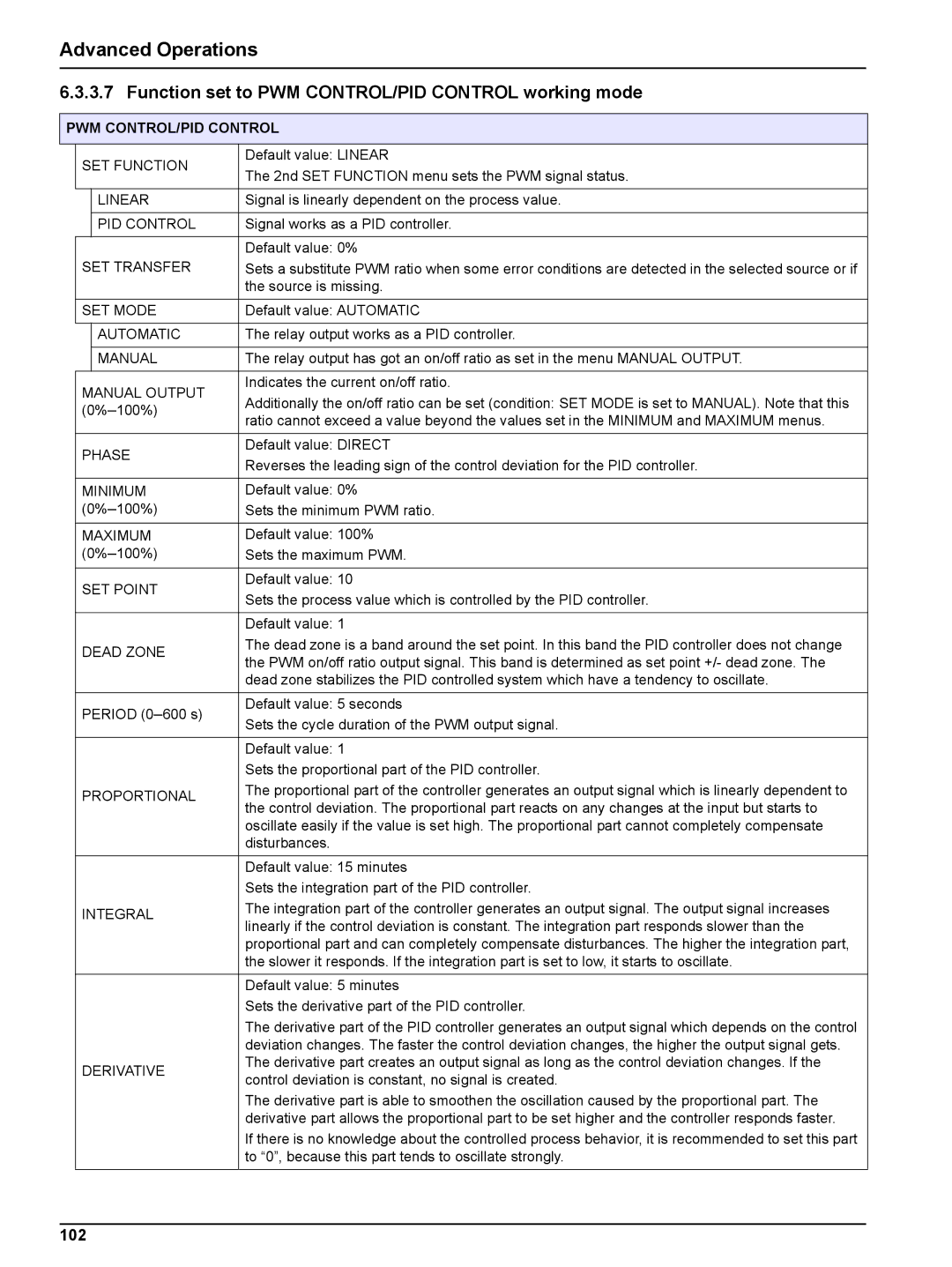
PWM CONTROL/PID CONTROL
| SET FUNCTION | Default value: LINEAR | |
| The 2nd SET FUNCTION menu sets the PWM signal status. | ||
|
|
| |
|
|
|
|
|
| LINEAR | Signal is linearly dependent on the process value. |
|
|
|
|
|
| PID CONTROL | Signal works as a PID controller. |
|
|
|
|
|
|
| Default value: 0% |
| SET TRANSFER | Sets a substitute PWM ratio when some error conditions are detected in the selected source or if | |
|
|
| the source is missing. |
|
|
| |
| SET MODE | Default value: AUTOMATIC | |
|
|
|
|
|
| AUTOMATIC | The relay output works as a PID controller. |
|
|
|
|
|
| MANUAL | The relay output has got an on/off ratio as set in the menu MANUAL OUTPUT. |
|
|
|
|
| MANUAL OUTPUT | Indicates the current on/off ratio. | |
| Additionally the on/off ratio can be set (condition: SET MODE is set to MANUAL). Note that this | ||
| |||
| ratio cannot exceed a value beyond the values set in the MINIMUM and MAXIMUM menus. | ||
|
|
| |
|
|
|
|
| PHASE | Default value: DIRECT | |
| Reverses the leading sign of the control deviation for the PID controller. | ||
|
|
| |
|
|
| |
| MINIMUM | Default value: 0% | |
| Sets the minimum PWM ratio. | ||
|
|
| |
| MAXIMUM | Default value: 100% | |
| Sets the maximum PWM. | ||
|
|
|
|
| SET POINT | Default value: 10 | |
| Sets the process value which is controlled by the PID controller. | ||
|
|
| |
|
|
|
|
|
|
| Default value: 1 |
| DEAD ZONE | The dead zone is a band around the set point. In this band the PID controller does not change | |
| the PWM on/off ratio output signal. This band is determined as set point +/- dead zone. The | ||
|
|
| |
|
|
| dead zone stabilizes the PID controlled system which have a tendency to oscillate. |
|
|
|
|
| PERIOD | Default value: 5 seconds | |
| Sets the cycle duration of the PWM output signal. | ||
|
|
| |
|
|
|
|
|
|
| Default value: 1 |
|
|
| Sets the proportional part of the PID controller. |
| PROPORTIONAL | The proportional part of the controller generates an output signal which is linearly dependent to | |
| the control deviation. The proportional part reacts on any changes at the input but starts to | ||
|
|
| |
|
|
| oscillate easily if the value is set high. The proportional part cannot completely compensate |
|
|
| disturbances. |
|
|
|
|
|
|
| Default value: 15 minutes |
|
|
| Sets the integration part of the PID controller. |
| INTEGRAL | The integration part of the controller generates an output signal. The output signal increases | |
| linearly if the control deviation is constant. The integration part responds slower than the | ||
|
|
| |
|
|
| proportional part and can completely compensate disturbances. The higher the integration part, |
|
|
| the slower it responds. If the integration part is set to low, it starts to oscillate. |
|
|
|
|
|
|
| Default value: 5 minutes |
|
|
| Sets the derivative part of the PID controller. |
|
|
| The derivative part of the PID controller generates an output signal which depends on the control |
|
|
| deviation changes. The faster the control deviation changes, the higher the output signal gets. |
| DERIVATIVE | The derivative part creates an output signal as long as the control deviation changes. If the | |
| control deviation is constant, no signal is created. | ||
|
|
| |
|
|
| The derivative part is able to smoothen the oscillation caused by the proportional part. The |
|
|
| derivative part allows the proportional part to be set higher and the controller responds faster. |
|
|
| If there is no knowledge about the controlled process behavior, it is recommended to set this part |
|
|
| to “0”, because this part tends to oscillate strongly. |