Advanced Operations
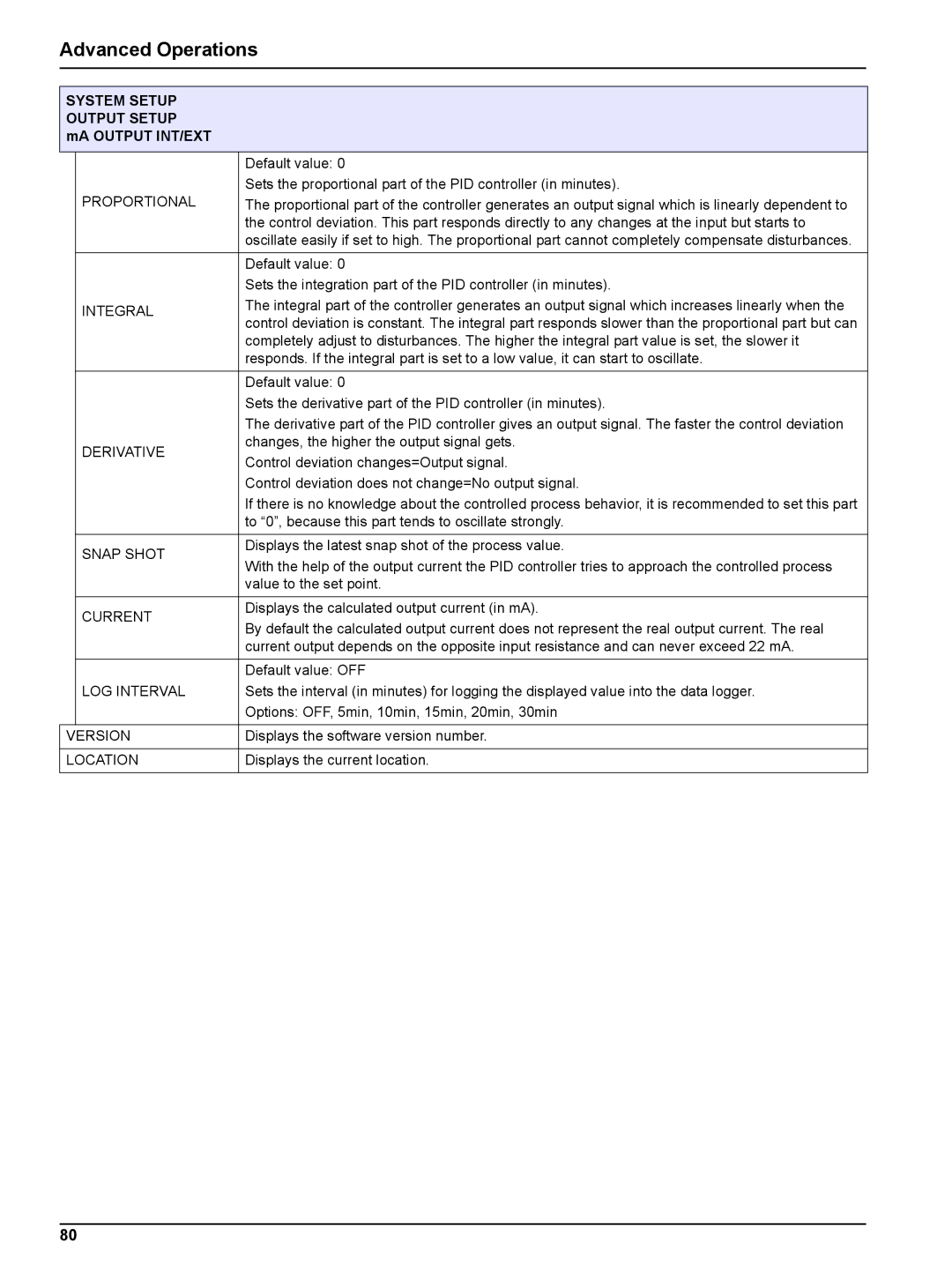
SYSTEM SETUP OUTPUT SETUP mA OUTPUT INT/EXT
|
| Default value: 0 |
| PROPORTIONAL | Sets the proportional part of the PID controller (in minutes). |
| The proportional part of the controller generates an output signal which is linearly dependent to | |
|
| the control deviation. This part responds directly to any changes at the input but starts to |
|
| oscillate easily if set to high. The proportional part cannot completely compensate disturbances. |
|
|
|
|
| Default value: 0 |
|
| Sets the integration part of the PID controller (in minutes). |
| INTEGRAL | The integral part of the controller generates an output signal which increases linearly when the |
| control deviation is constant. The integral part responds slower than the proportional part but can | |
|
| |
|
| completely adjust to disturbances. The higher the integral part value is set, the slower it |
|
| responds. If the integral part is set to a low value, it can start to oscillate. |
|
|
|
|
| Default value: 0 |
|
| Sets the derivative part of the PID controller (in minutes). |
|
| The derivative part of the PID controller gives an output signal. The faster the control deviation |
| DERIVATIVE | changes, the higher the output signal gets. |
| Control deviation changes=Output signal. | |
|
| |
|
| Control deviation does not change=No output signal. |
|
| If there is no knowledge about the controlled process behavior, it is recommended to set this part |
|
| to “0”, because this part tends to oscillate strongly. |
|
|
|
| SNAP SHOT | Displays the latest snap shot of the process value. |
| With the help of the output current the PID controller tries to approach the controlled process | |
|
| |
|
| value to the set point. |
|
|
|
| CURRENT | Displays the calculated output current (in mA). |
| By default the calculated output current does not represent the real output current. The real | |
|
| |
|
| current output depends on the opposite input resistance and can never exceed 22 mA. |
|
|
|
|
| Default value: OFF |
| LOG INTERVAL | Sets the interval (in minutes) for logging the displayed value into the data logger. |
|
| Options: OFF, 5min, 10min, 15min, 20min, 30min |
|
|
|
VERSION | Displays the software version number. | |
|
| |
LOCATION | Displays the current location. | |
|
|
|
80