User’s Guide
For immediate technical or application assistance
Electronic Manuals Provided on the Accompanying CD-ROM
Foreword
Trademarks
Revisions
Version Suffix Code Added or Modified Functions Reference
Recorder’s Version and Functions Described in This Manual
RD100B Versions and Functions
Software Sold Separately
Iii
Safety Precautions
Safety Standards and EMC Standards
About This Manual
Exemption from Responsibility
Handling Precautions of the Software
Checking the Contents of the Package
Optional Accessories Sold Separately
Standard Accessories
Checking the Contents of the Package
Vii
Removing the Packing Materials
Pen Model
Dot Model
Viii
How to Use This Manual
Conventions Used in This Manual
Contents
Contents
Setup Operations for Convenient Functions Setting Mode
Xii
Maintenance
Overview of the Recorder
Input Section
Measuring Input Section
Scaling
Measuring Input Section Delta Computation
Square Root Computation
Reference Junction Compensation of Thermocouple Input
Burnout Detection of Thermocouples
Measuring Input Section Bias
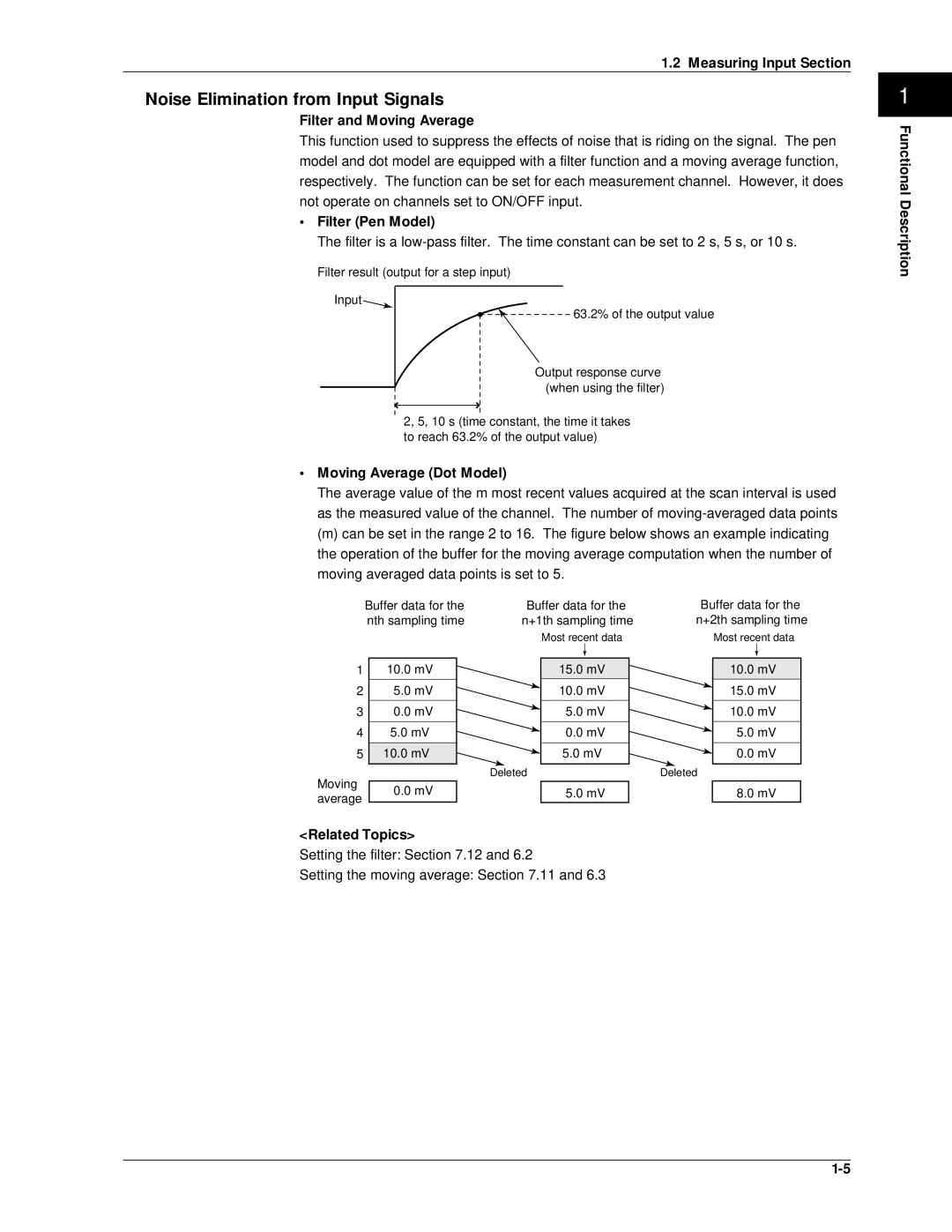
Filter Pen Model
Noise Elimination from Input Signals
Measuring Input Section
Filter and Moving Average
Model Integration Time of the A/D Converter
Integration Time of the A/D Converter
Alarm Types
Alarms
Alarm Hysteresis
Alarms Delay High Limit Alarm T
Delay Low Limit Alarm t
Delay High Limit Alarm Example T is the specified delay
Non-Hold/Hold Operation of the Alarm Indication
Alarm Indication
Alarm Recording
Alarm Output Relay /A1, /A2, and /A3 Options
Alarm
Alarms Reflash Alarm
Channel Approx ms Approx ms
Description
Alarms AND/OR Operation of Alarm Output Relays
Energized/De-energized Operation of Alarm Output Relays
Functional
Alarms Non-Hold/Hold Operation of Alarm Output Relays
Alarm ACK Operation
Recording
Recording Method Dot Model
Chart Speed
Trend Recording
Recording Method Pen Model
Same time
Recording Partial Expanded Recording
Pen Offset Compensation Pen Model
Compressed Expanded
Printout Example on the Pen Model
Printout
Functional Description Channel Printout Dot Model Only
Recording Printout Example on the Dot Model
Interval
Recording Alarm Printout
Printout Contents for details, see appendix
Periodic Printout
Message Printout
New Chart Speed Printout
Recording Turning ON/OFF the Periodic Printout
Manual Printout
Printout Example of List on the Pen Model
Recording Setting Printout
Printout Example of List on the Dot Model
Displayed Information
Display
Display Types
Flag Display
Alarm Status Display
Date/Time and Chart Speed
Channel Digital + 1 Bar Graph Display
Types of Computations
Computation Function /M1 Option
Computation Function
Channels Dedicated to Computations
Assignment of Computation Channels to the Pens Pen Model
Handing of the Unit in Computations
Recording Computation Channels
Trend Recording
Printout
Alarms
Display
Starting/Stopping Computation
Fail Relay Output
FAIL/Chart End Detection and Output Function /F1 Option
Chart End Output
Fail Output
Remote Control Function /R1 Option
Rising/Falling edge Trigger Level Ms or more
Remote Control Function /R1 Option Computation Start/Stop
Computation Reset
Remote Signal Edge, Trigger, and Level
Language
Temperature Unit
Other Functions
Key Lock
Handling Precautions
Handling Precautions
Before Using the Recorder
Installation Location
Installation
Flat blade
Installation Procedure
Installation
Front Contact With each other
Panel Cutout
External Dimensions of the Recorder
General Precautions to Be Taken While Wiring
Input Signal Wiring
Precautions to Be Taken While Wiring
Clamped input terminal H2 option
Arrangement of the Measuring Input Terminals
Measuring input terminal block
Screw input terminal
Before Using
Input Signal Wiring Dot Model
Recorder
Input Signal Wiring
Measuring Input Wiring
DC current input +/A Shunt resistor
Optional terminal block
Optional Terminal Wiring
Arrangement of the Optional Terminals
Crimp-on lug with insulation sleeves for 4 mm screws
Remote Control Input Terminals
Optional Terminal Wiring
Relay contact output Voltage-free contact Open collector
Wiring Procedure
Relay Contact Output Specifications
Relay Contact Input/Transistor Input Specifications
Precautions to Be Taken While Wiring the Power Supply
Power Supply Wiring
Power Supply Specifications
Power Supply Wiring
Checking the Date/Time
Turning ON/OFF the Power Switch
Names of Parts
Names of Parts
Front
Names of Parts and Run Operations
During normal operation CH UP key
Display and Key Panel
Status display
Seven keys are available
Names Parts Run Operations
Rear Panel
Loading the Chart Paper
Installing or Replacing the Chart Paper
Stopper
Side with
Installing or Replacing the Chart Paper
Fold chart paper Sprocket teeth
Chart holder
Feeding the Chart Paper
Replacing Felt Pens
Installing/Replacing Felt Pens or Plotter Pen Pen Model
Display and key panel
Replacing the Plotter Pen
Holder tab
Installing/Replacing the Ribbon Cassette Dot Model
Cassette holder
Installing/Replacing the Ribbon Cassette Dot Model
Hole for the ribbon Feed shaft Ribbon feeding knob
Stopping the Recording
Recorded chart paper can be pulled out Front cover tab
Starting/Stopping the Recording
Starting the Recording
Switching the Displayed Channel Using Keys
Switching the Display Screen
Switching the Display Screen
Channel Auto Switching
Starting the Manual Printout
Printing Measured Values Manual Printout
Aborting the Manual Printout
Starting the List Printout
Printing the Recorder Settings
Starting the Setup Printout
Aborting the Setup Printout
Buf.clear=Alarm
Clearing the Alarm Printout Buffer
Clearing the Message Printout Buffer
Displays the preset message
Printing Messages
Printing a Message
Resetting the Report Data
Resetting the Report Data of the Periodic Printout
Alarm Alarm output relay Blinking Alarm indication
Releasing the Alarm Output Alarm ACK Operation
Releasing the Alarm Output
Alarm Output Relay Operation
Activating the Key Lock
Activating/Releasing the Key Lock
Releasing the Key Lock
Run Modes
Exiting from Basic Setting Mode Returning to Operation Mode
Entering Setting Mode
Entering Basic Setting Mode
Exiting from Setting Mode Returning to Operation Mode
Key Operations
Changing the Settings
Using the ESC Key
Entering Values
Copying & Pasting a Character String
Entering Characters
Inserting Characters
Deleting a Character
Operation Menus Using the Func Key Operation Mode
Menu Structure, Settings, and List of Default Values
Exchange Dot Model
Menu Structure, Settings, and List of Default Values
Menu Structure of Setting Mode
POC
Menu Structure of Basic Setting Mode
Setup Items in Setting Mode and Their Default Values
RJC RJC
Setup Items in Basic Setting Mode and Their Default Values
Remote control function /R1 option
Setting initialization
NORMAL/MODBUS Normal
Description Reference Section
Function Setup Guide
Alarm functions Description Reference Section
Function Setup Guide
Recording functions Description Reference Section
Or tag
Channel number
Recording color
Other functions Description Reference Section
Display functions Description Reference Section
Computed value
Timer number
Frequently Used Setup Operations Setting Mode
Setting the Input Range
TC, RTD, and DC Voltage
Input Type
Setting the Input range
Selectable Range of Input Range, Span Left, and Span Right
N1 Option
Linear Scaling
Span Left and Span Right
Delta Computation
First channel Last channel
Range Type Selectable Span Values
ON/OFF Input
Select the right scale value
5V Input
Scale Left and Scale Right
Low-cut
Low-cut and Low-cut Point
Square Root Computation
To 5.0% of the recording span, 0.1 steps
Skip Unused Channels
Set the channel range Select Skip New setting takes effect
Setting the Alarm
Channel Range
Setting the Alarm
Alarm Type
Symbol Name
Relay No
Difference High Limit Alarm/Difference Low Limit Alarm
Setting the Unit on Scaled Channels
Chart speed on the pen model unit mm/h
Changing the Chart Speed
Mode
Date/Time New setting takes effect
Setting the Date/Time
Recorders with Version 1.02 or Earlier
When set to Auto
Setting the Trend Recording Interval Dot Model
Setup Operations for Convenient Functions Setting Mode
Functions Setting Mode
Filter Time Constant
Setting the Filter Pen Model
New setting takes effect
Setting the Moving Average Dot Model
Number of Samples of Moving Average
Zone
Setting Recording Zones for Each Channel Zone Recording
Expand
Setting the Partial Expanded Recording
Trend Recording Dot Model
Characters That Can Be Used for Tags
Setting Tags on Channels
Characters That Can Be Used for Messages
Setting the Message String
See section
Duration New setting takes effect
Setting the Alarm Delay Duration
Display Brightness
Setting the Brightness of the Display and Internal Light
Internal Light Brightness
When bias is On
Applying a Bias on the Measuring Input Signal
Setup Operations For Convenient Functions Setting Mode
End month, End day, and End time
Start month, Strt day, and Start time
DST
Changing the Settings
Changing the Auxiliary Alarm Function
Diagnosis
Changing the Auxiliary Alarm Function
Behavior
Changing the Auxiliary Alarm Function Reflash
Indicator
Act
Integrate
Changing the Integration Time of the A/D Converter
Burnout
Setting the Burnout Detection Function of Thermocouples
Setting the RJC Function on Channels Set to TC Input
Volt
Setting the RJC Function on Channels Set to TC Input
Color
Changing the Channel Recording Color Dot Model
POC Pen Offset Compensation
Pen model
Turning Printouts ON/OFF
Pen Color Printout
Alarm
CH/Tag
Channel Dot Model
Periodic Printout Interval
Types of Report Data to Be Printed
Changing/Adding Functions Basic Setting Mode
SUM scale
Ref. Time
Graph
Setting the Bar Graph Display Mode
Setup
Functions Basic Setting Mode
Setting the Key Lock Function
Setting the Key Lock Function
Operation of Keys to Be Key-Locked
Password
MovingAVE
Enabling the Moving Average Function Dot Model
Filter
Enabling the Filter Function Pen Model
Partial
Enabling the Partial Expanded Recording Function
Lang Language
Changing the Display/Recording Language
Procedure
Sqrt low-cut
Alarm delay
5V low-cut
Changing the Time Printout Format
RCD On
Changing the Time Printout Format
Speed
Basic=Initialize screen
Initializing the Settings
ESC/?
Changing the Settings
Function to Be Assigned
Remote No
Changing the Printout/Display Format of the Date
Setting Format Example
Date Format
Temp Temperature
Changing the Temperature Unit
Key Operations for Changing the Displayed Information
Setup Operations for Changing the Displayed Contents
Displaying the Data Display Setup Screen
Setup Operations for Changing Displayed Contents
End Flag display
Data Display Setup Menu
Key Operations for Changing the Displayed Information
End
Assigning Other Display Types See the menu on the previous
Changing the Displayed Contents
Changing the Displayed Information
Channel Digital Display
Stopping the Computation
Starting/Stopping/Resetting the Computation
Operations Related to the Computation Function /M1 Option
Starting the Computation
Setting the Computing Equation
Description Character Key
Inserting a Character
Order of Precedence in Computations
Computing Equation
Type Operator
Four Arithmetic Operation
Power and Other Computations
Equation Examples
Logical Computation
Relational Computation
Equation Example 01-02OR03.GT.04
XOR
Equation Example
Tlog Computation
Examples of Equations That Are Not Allowed
Characters That Can Be Used for Units
Setting the Unit
Constant
Setting the Constants Used in Equations
Select On to set the alarm. When set
Alarm Value
Specifying the Timer Used in Statistical Calculations Tlog
Timer # Periodic
Specifying the Timer Used in Statistical Calculations Tlog
Timer No
Timer operation
Set the leftmost value of the recording
New setting takes effect Related Topics
Dot model
Set= Math Math= Aux Aux= Tag
Duration
Basic=Math Math=TimerTLOG Timer No.=1 Mode=Absolute
Absolute Time Mode
Timers
Number of Timers
Timer Type
Example TLOG.SUM computation
Timer timeout Reset Reset Reset Reset On Reset Off
Select the channel
Output pen
Changing the Channel Assignments of Recording Pens Pen Model
Function /M1 Option
Operations
Setting the periodic printout interval Section
Select the display mode of the bar
Select the computation error procedure
Over
Error
Channel Limit Value
Troubleshooting 10-1
List of Error Messages
Setting Errors
Troubleshooting
When the timer expired
Operation Errors
Communication Errors
List of Error Messages
Troubleshooting 10-3
System Errors
10-4
Troubleshooting Flow Charts
10-5
Troubleshooting Flow Charts
10-6
Periodic Inspection
Maintenance
Maintenance 11-1
Remaining amount of chart paper
Dot Model
Cleaning the Recorder
Cleaning Procedure
Pen Model
Replacing the Internal Light LED
Replacement Procedure
Maintenance 11-3
Flexible printed circuit board LED assembly Connector
Calibrating the Recorder
Calibration Procedure
Required Instruments
Maintenance 11-5
Temperature Measurement When Using a Thermocouple
RJC of TC input
Basic=PAdj screen
Adjusting the Pen Position Pen Model
11-6
Maintenance 11-7
Adjusting the Dot Printing Position Dot Model
Adjusting the Hysteresis
Adjusting Zero and Full
11-8
Adjusting the Dot Printing Position Dot Model
Maintenance 11-9
Recommended Replacement Periods for Worn Parts
Part Name Quantity Period Used
Replacement Part Name Quantity Period Used
Recommended Replacement Periods for Worn Parts Dot Model
11-10
Input Type
Input Specifications
Number of Inputs and Scan Interval on the Pen Model
Number of Inputs and Scan Interval on the Dot Model
Input Type Operating Conditions
Input Specifications
Input Computation Standard Function
12-2
Specifications 12-3
Alarm Function Specifications
Trend Recording Dot Model
Recording Function Specifications
Chart Paper
Trend Recording Pen Model
Specifications 12-5
Recording Function Specifications
Printouts Pen Model
12-6
Printout Dot Model
Display and Displayed Contents
Display Function Specifications
Status Display Description
Display Function Specifications
ItemSpecifications
12-8
Symbol Description
Specifications 12-9
12-10
Digital display is the same as
Specifications 12-11
Name Display Example DI/DO status display Status display
Channel digital display Measurement channel Tag display
12-12
RS-422A/485 Communication Interface /C3
Specifications of Optional Functions
Alarm Output Relay /A1, /A2, and /A3
Specifications 12-13
Computation Function /M1
FAIL/Chart End Detection and Output /F1
Clamped Input Terminal /H2
Non-Glare Door Glass /H3
Expansion Inputs /N3
Specifications 12-15
Cu10, Cu25 RTD Input /N1
Legs Isolated RTD /N2
Time When Signal Is Input Procedure
Remote Control 5 Points /R1
12-16
Construction
General Specifications
Power Supply
Specifications 12-17
Supported Standards
General Specifications
Isolation
Transport and Storage Conditions
Excludes
Specifications 12-19
Resolution
Standard Performance
Effects of Operating Conditions
Other Specifications
12-20
144 151.5
Dimensional Drawings
Specifications 12-21
220
Periodic Printout
Recording color
Report Mode
Time tick and time tick cancel mark
Scale, recording color, and chart speed
Scale and chart speed
Channel data, alarm, scale printout, and chart speed
App-4
Printout Using the Tlog Timer /M1 Option
Timer
Offset compensation mark, scale, and recording color
Special Cases
Operation during Power Failures
Procedure of Handling Over Values during Periodic Printout
Time of Recovery Statistical Calculation Operation
Index Index-1
Index
Index-2
Index
7-11
Index Index-3
Index-4
WARRANTY/DISCLAIMER
Shop online at omega.com