Tosvert VF-S9
Contents
E6580757
Iii
Meanings of symbols
Safety precautions
Safety precautions
Explanation of markings
General operation
Wiring
Transportation ‚ Installation
Operations
Maintenance and inspection
When retry function is selected inverter
Attach warning labels
Disposal
II. Introduction
Features
Read first
Check product purchase
Mandatory
Contents of the product code
Outside view
Names and functions
Terminal board cover
Charge lamp
E6580757
2022PL
Main circuit and control circuit terminal boards
VFS9-2022PM/2037PM VFS9-4007PL ∼ 4037PL
2015PM
VFS9-2055PL/2075PL 4055PL/4075PL
See 2.3.2 for details on all terminal functions
How to open the front terminal board cover
Motors
Extremely low loads and low inertia loads
Braking a motor when cutting off power supply
Occurrence of instability
Loads that generate negative torque
Inverters
Power factor improving capacitors
Protecting inverters from overcurrent
Inverter capacity
Effects of leak current across ground
What to do about leak current
Circuit interupting fuse
MCCBn+1 INVn
Remedies
Power
Ffects of leak current across lines
Supply
Use the electronic thermal built into the inverter
Installation environment
Installation
Continuous operation this may result in fire
Not examples for resistance to fire or explosion
Consult with Toshiba about these measures
Installation location
How to install
Inverter Type
Cabinet must be ventilated and cooled
Installing more than one unit in a cabinet
Connection equipment
Control and main power supply
Wiring
Preventing radio noise
Standard connections
This diagram shows a standard wiring of the main circuit
Standard connection diagram 1 sink common CC
VF-S9
Standard connection diagram 2 source common P24
Description of terminals
Power supply and motor connections
Main circuit terminals
Connections with peripheral equipment
Main circuit
Control circuit terminals sink logic
~60Hz60Hz setting frequency
Input Standard default setting 0~10Vdc input Internal imped
Put. Standard default setting output cur 1mA full-scale dc
By jumper JP302 switching Full scale DC am
= 1, 30Vdc-1A, 250Vac-1A cos φ = At resistance load
Multifunction programmable relay contact
Output Detects the operation of the inverters 30Vdc-1A
During protection function operation
Input Common Output
Logic switching/voltage-current output switching jumper
Operations
Wiring
How to operate the VF-S9
Motor
Main circuit
E6580757
Mccb
Motor
Adjustment range
Simplified Operation of the VF-S9
Monitor display selection Is set to
How to set the frequency
How to start and stop
Example of operating a run from the panel
Setting the frequency using the operation panel
Moves the frequency down
Potentiometer
E6580757
Status monitor mode Mode for monitoring all inverter status
Setting monitor mode Mode for setting inverter parameters
Basic VF-S9 operations
VF-S9 has the following three monitor modes
Setting monitor mode
How to set parameters
Press the Enter key to save the changed maximum frequency
How to set the basic parameters
Key and the key to select
How to set extended parameters
Search and resetting of changed parameters
Example of parameter setting
Key to change the dynamic braking selection from
How to search and reprogram parameters
How to program setup parameters
Returning all parameters to standard default setting
Command mode selection Set , and and can
Parameters that cannot be changed while running
Key operated LED display Operation
Key or the key to change the set value. To return to
Pressing the Enter key displays
Basic parameters
Setting acceleration/deceleration time
Automatic acceleration/deceleration
Set automatic acceleration/deceleration to or
Parameter setting Title Function Adjustment range
Manually setting acceleration/deceleration time
Acceleration time Seconds
Deceleration time Seconds
Automatic torque boost
Increasing starting torque
Set V/F control mode selection to 0 V/F constant
Automatic torque boost and V/F control mode selection
If auto-tuning error Appears, see 6.13
Auto
Setting parameters by operating method
Setting environmental protection
Automatic environment setting
Automatic function setting
VIA/II UP/DOWN
Command mode selection Frequency setting mode selection
Selection of operation mode
Command mode selection
Title Function Adjustment range
Meter setting and adjustment
Preset-speed operation
Meter selection Meter adjustment
Resolution
Adjustment scale with meter adjustment parameter
Example of 4-20mA programmed output for details, see
Connect meters as shown below
Adjusting the meter in inverter stop state
Standard default setting
Default setting
Tion Is set to
Parameter setting
Setting values
Selecting forward and reverse runs operation panel only
Forward/reverse run selection
Upper limit and lower limit frequencies
Maximum frequency
Maximum frequency
Upper limit frequency Lower limit frequency
Base frequency
Base frequency
Base frequency 25 ∼ 400 Hz
Control mode selection
Selecting control mode
Time
Selection
Setting for fans and pumps
Constant torque characteristics general method of use
Increasing starting torque
Setting V/F control selection Automatic torque boost
Motor constant must be set
This gives steady torque for stable runs
Energy-saving
Precautions on vector control
Sorless vector control
Somewhat lower
Setting the electronic thermal
Manual torque boost increasing torque at low speeds
Torque boost
Overload
Title Function Adjustment range Default setting
Protection Stall
Motor electronic thermal pro
Default setting 100% Press Key to change the parameter to
Setting of motor electronic thermal protection level
Setting value Overload protection Overload stall
Setting the motor electronic thermal protection level
Inverter over load characteristics
Preset-speed operation speeds in 15 steps
Preset-speed operation frequencies 1~7
Preset-speed operation frequencies 8~15
S3-CC
Preset-speed
Terminal functions are as follows Terminal S1
=6 SS1
Example of 7-step speed operation
Using other speed commands with preset-speed command
Low-speed signal output frequency
Low-speed signal
Low-speed signal output frequency ∼ Hz
Extended parameters
Output of designated frequency reach signal
Parameter setting of output terminal selection
Speed reach detection band
Speed reach setting frequency Speed reach detection band
Output of set frequency speed reach signal
Parameter setting of set frequency and detection band
Title Function Adjustment range Setting
Input signal selection
Changing the standby signal function
ST standby signal selection
Setting the reset signal
Keeping an input terminal function always active on
Terminal function selection
Modifying input terminal functions
Always-active function selection
Terminal Title Function Adjustment range Default setting
Setting of contact input terminal function
Input terminal selection 3 RST Reset
Connection method Contact input Sink logic
Case of three-wire operation Set to
Example of application ... Three-wire operation
Sink logic/source logic input
Input terminal selection
Modifying output terminal functions
Setting of output terminal function
Examples of application
Output terminal selection
Switching motor characteristics via terminal input
Setting of switching terminals
Basic parameters
Frequency priority selection
Automatic frequency switching
Set frequency is cleared automatically after power-off
External switching Fchg enabled
External contact UP/DOWN
Contact input. See
Setting frequency command characteristics
20mAdc current input adjustment
10Vdc voltage input adjustment VIA, VIB
Adjustment with pulse signals Parameter-setting example
Sample sequence diagram 1 Adjustment with continuous signals
Frequency adjustment range
Sample sequence diagram 2 Adjustment with pulse signals
Minimum unit of frequency adjustment
Simultaneous input
Operation frequency
Starting frequency setting
Starting frequency
Function Frequency set with the parameter
2 Run/stop control with frequency setting signals
DC braking
DC braking
Jog run mode
Jog run frequency Jog run stopping pattern
DC braking time 20.0 sec
Jog run setting
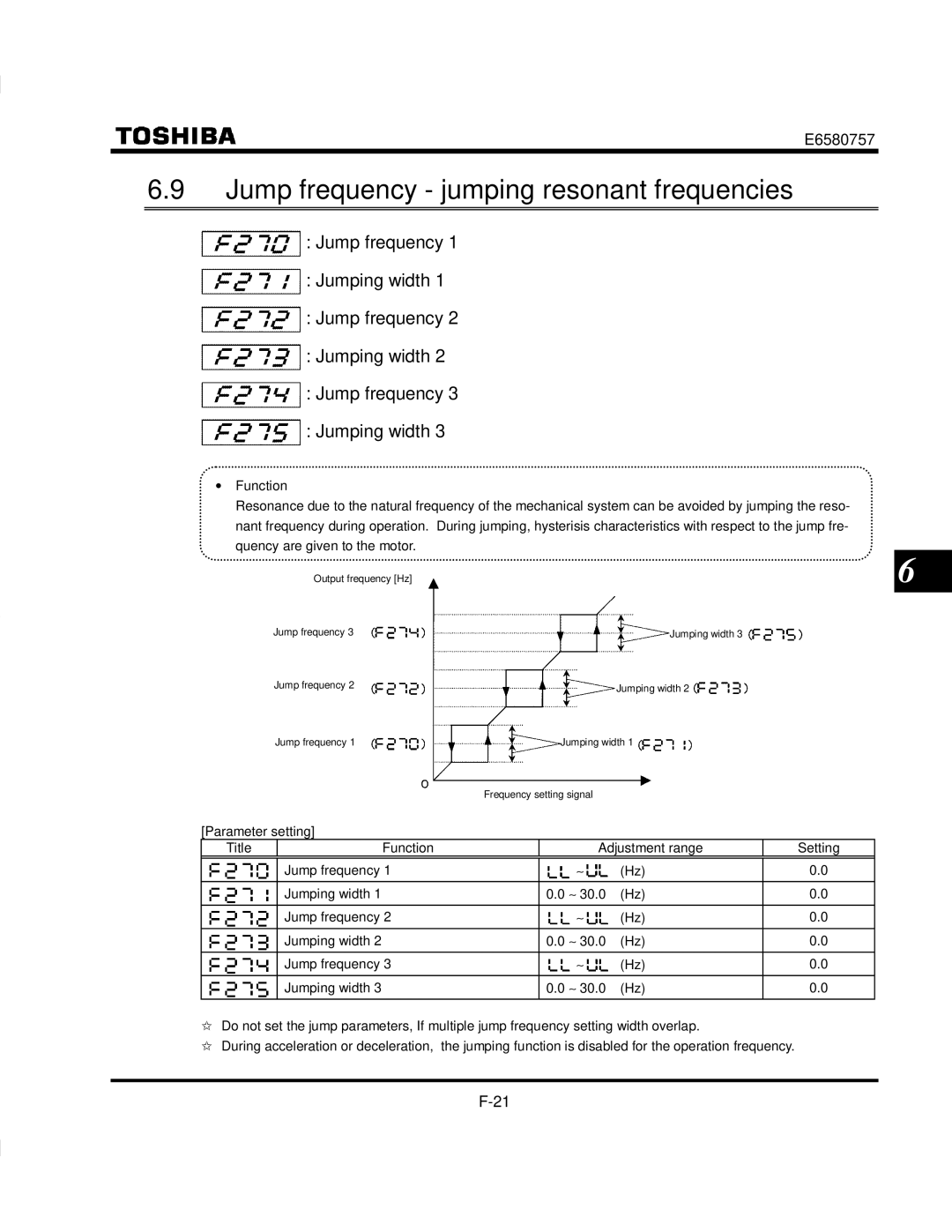
Jump frequency Jumping width Jump frequency 3 Jumping width
Jump frequency jumping resonant frequencies
∼ Preset-speed operation frequency 8 to
Preset-speed operation frequency 8 to
Random mode
PWM carrier frequency
Trip-less intensification
Auto-restart Restart during coasting
Auto-restart control selection
DC braking during restart
Restarting motor during coasting Motor speed search function
Regenerative power ride-through control
Regenerative power ride-through control
If momentary power failure occurs
Application
Canceling conditions
Retry function
Retry selection
Dynamic braking selection Braking resistor operation rate
Dynamic regenerative braking
Connecting an external braking resistor optional
Parameter setting Title Function
Separate-type optional resistor with thermal fuse
Setting the braking resistor operation rate
12.5 Avoiding overvoltage tripping
Minimum resistances of connectable braking resistors
Overvoltage limit operation
To the base frequency So that no
Output voltage adjustment/Supply voltage correction
Output voltage unlimited
External connection
Conducting PI control
100.0 Integral gain
100.0
Adjusting the PI control gain level
Setting PI control
Gain adjustment parameter
Types of PI control interfaces
Adjusting analog command voltages
Selection 1 Setting by automatic torque boost
Setting motor constants
Set the auto-tuning parameter to
See .2 for details of the setting method
Rameters Auto-tuning Application of individual settings
To the actual operation
Perform adjustments according to the actual operation
Acceleration time 3600 s
Deceleration time 3600 s
Linear acceleration/deceleration
Acceleration/deceleration patterns
Selection using parameters
Switching to acceleration/deceleration
Protection functions
Setting motor electronic thermal protection
Inverter trip retention
Setting current stall
Stall prevention level
Inverter trip retention selection
External trip stop via terminals
External input trip stop mode selection
Is set to Emergency DC braking, also set
Emergency DC braking time
Output phase failure detection mode selection
Output phase failure detection
Failure detection signal generated FL relay deactivated
Emergency stopping from the operation panel
Input phase failure detection
Control mode for small current
Input phase failure detection mode selection
Disabled Enabled Over-torque trip/alarm level ∼ 250 %
Specified time Title Function Adjustment range
Over-torque trip
Level flows for more than
No trip Over-torque detection Pre-alarm signal
Detection signal
Output terminal function 12 OT Over-torque detection
No trip Over-torque
15.10 4-20mA dc calibration
Undervoltage trip
Undervoltage trip selection
Meter bias
Examples of setting
Prohibition of change of parameter settings
Prohibition of change of parameter settings
Setting methods
Changing the display unit to A/V/min-1
Resetting method
Unit selection
Free unit selection
Display in percentage terms Display in amperes/volts
Standard monitor mode ⇒ Standard monitor display selection
Changing the display format while power is on
Changing the status monitor display format
Standard monitor display selection
Communication function Common serial
Setting the communication functions
Using the RS232C/RS485
Transmission specifications
Communication function parameters Common serial options
Example of connection for RS485-communication
Command by communicating independently
Next data Use the terminal board to branch the cable
Number, to the host computer
Setting the operation frequency
Operation panel key setting
Applied operation
S1 UP S2 Down S3 CLR
Switching between external contact UP/DOWN VIA input
Preset-speed setting
To switch to VIA/II setting, use the external PNL/TB
S1FCHG
Signal Voltage signal
Switching between analog setting and preset-speed setting
Setting by means of a remote input device
Operation is controlled in accordance with Setting
Terminal board operation
Setting the operation mode
Enable to run at HD on
Case of three wire operation Set to
Eration holding S1 terminal set to
Operation, inverter stop
Operation from an external input device
S2 PNL/TB VIA VIB
OFF
LED
Display of trip information
Display of trip information
Example of call-up of trip information
E6580757
How to cope with the CE directive
Taking measures to satisfy the CE/UL directive
About the EMC directive
Measures to satisfy the EMC directive
Single-phase 200V class
Example of wiring
Measures to satisfy the low-voltage directive
About the low-voltage directive
Inverter satisfies the low-voltage directive
Plate. Refer to the .1 for earth cable sizes
Peripheral devices
Selection of wiring materials and devices
Selection of wiring devices
Installation of a magnetic contactor
Magnetic contactor in the primary circuit
Magnetic contactor in the secondary circuit
Optional external devices
Installation of an overload relay
200V-3.7kW Improvement Other model
Effect Reactor type Power factor Harmonics Suppression
Or less Input AC reactor DC reactor
Actor effective for external surge suppression
Parameter writer
Ward/reverse switch Model CBVR-7B1
Model PWU001Z Extension panel
UP/DOWN key, Monitor key, and Enter key Model RKP001Z
Input AC re Actor
Devices
DCL
Noise filter
Devices External dimensions and connections Foot Mounted
Devices External dimensions and connections Braking Resistor
Writer Exten
Devices External dimensions and connections Parameter
Sion panel
Communica
User parameters
Table of parameters and data
Four automatic functions
Other Basic parameters
Input/output parameters
Extended parameters
VIB, VIA/II
Frequency parameters
0213 VIB input point 400 Frequency Frequency Down
Operation mode parameters
Torque boost parameters
Acceleration/deceleration time parameters
Protection parameters
Communication parameters
Operation panel parameters
Table of input terminal functions 1/3
Default settings by inverter rating
ST+PNL/TB
Table of input terminal functions 2/3
Table of output terminal functions 1/2
Table of input terminal functions 3/3
POL
Table of output terminal functions 2/2
Order of precedence of combined functions
Specifications
Models and their standard specifications
Standard specifications
Specification
Outside dimensions and mass
Outside dimensions and mass
Plate
Fig.A
Trip causes/warnings and remedies
Before making a service call Trip information and remedies
Problem Possible causes Remedies Overvoltage during
Problem Possible causes Remedies Small-current opera
Process of initializa Values
Restoring the inverter from a trip
If the motor does not run while no trip message is displayed
How to determine the causes of other problems
How to cope with parameter setting-related problems
Regular inspection
Inspection and maintenance
Check points
Periodical inspection
Check items
Call the local sales agency
Replacement of expendable parts
Standard replacement cycles of principal parts
Making a call for servicing
Keeping the inverter in storage
Warranty
Disposal of the inverter
Toshiba Corporation

 : Jump frequency 1
: Jump frequency 1 : Jumping width 1
: Jumping width 1 : Jump frequency 3
: Jump frequency 3  : Jumping width 3
: Jumping width 3