|
|
|
| E6580757 | |
|
|
|
|
|
|
| [Parameter setting] |
|
|
| |
| Title | Function | Adjustment range | Default setting |
|
|
|
|
|
|
|
|
| Jog run frequency | 0.0 ∼ 20.0 (Hz) | 0.0 |
|
|
|
| 0: Slowdown stop |
|
|
|
| Jog run stopping pattern | 1: Coast stop | 0 |
|
|
|
| 2: DC braking |
|
|
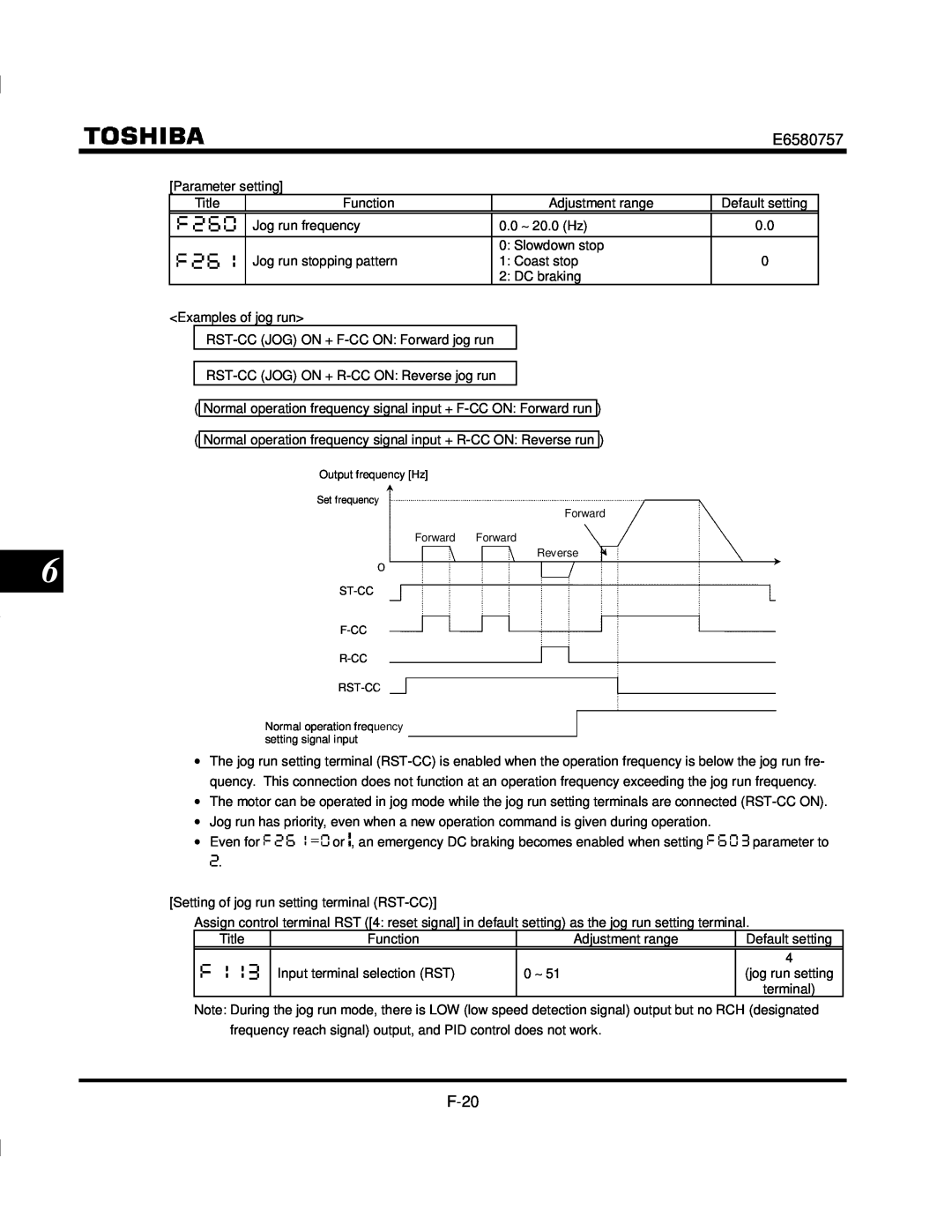
<Examples of jog run>
( Normal operation frequency signal input +
( Normal operation frequency signal input +
Output frequency [Hz]
Set frequency
Forward
Forward Forward
6
Reverse
Normal operation frequency setting signal input
•The jog run setting terminal
•The motor can be operated in jog mode while the jog run setting terminals are connected
•Jog run has priority, even when a new operation command is given during operation.
•Even for ![]() or
or ![]() , an emergency DC braking becomes enabled when setting
, an emergency DC braking becomes enabled when setting ![]() parameter to
parameter to
![]() .
.
[Setting of jog run setting terminal
Assign control terminal RST ([4: reset signal] in default setting) as the jog run setting terminal.
Title | Function | Adjustment range | Default setting |
|
|
|
|
|
|
| 4 |
| Input terminal selection (RST) | 0 ∼ 51 | (jog run setting |
|
|
| terminal) |
Note: During the jog run mode, there is LOW (low speed detection signal) output but no RCH (designated frequency reach signal) output, and PID control does not work.