Chapter 4 Parameters
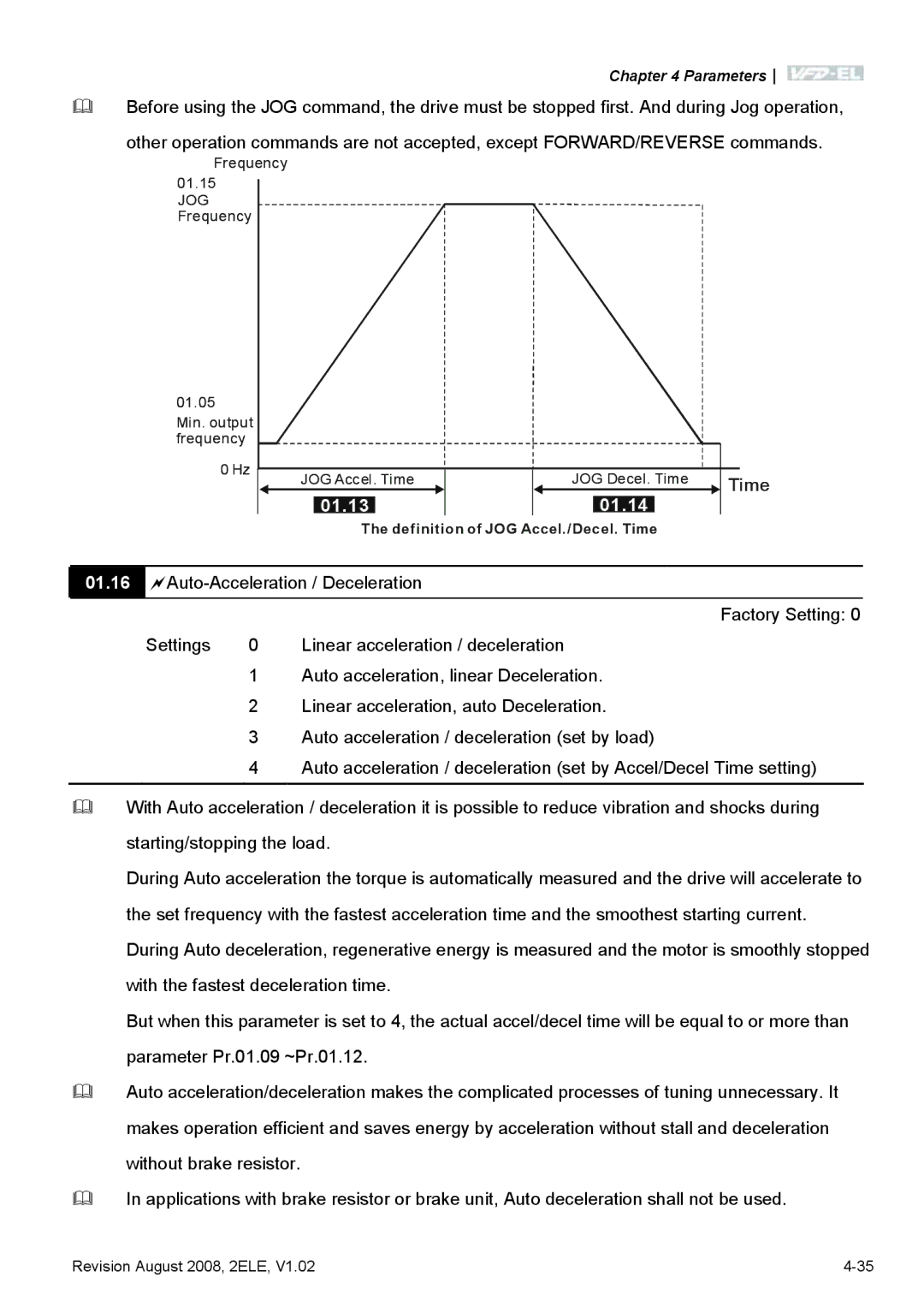
Before using the JOG command, the drive must be stopped first. And during Jog operation,
other operation commands are not accepted, except FORWARD/REVERSE commands.
Frequency
01.15 JOG ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Frequency
Frequency![]()
![]()
01.05 |
|
|
|
Min. output |
|
|
|
frequency |
|
|
|
0 Hz | JOG Accel. Time | JOG Decel. Time | Time |
| |||
| 01.13 | 01.14 |
|
The definition of JOG Accel./Decel. Time
01.16
Factory Setting: 0
Settings | 0 | Linear acceleration / deceleration |
1Auto acceleration, linear Deceleration.
2Linear acceleration, auto Deceleration.
3Auto acceleration / deceleration (set by load)
4Auto acceleration / deceleration (set by Accel/Decel Time setting)
With Auto acceleration / deceleration it is possible to reduce vibration and shocks during
starting/stopping the load.
During Auto acceleration the torque is automatically measured and the drive will accelerate to
the set frequency with the fastest acceleration time and the smoothest starting current.
During Auto deceleration, regenerative energy is measured and the motor is smoothly stopped
with the fastest deceleration time.
But when this parameter is set to 4, the actual accel/decel time will be equal to or more than
parameter Pr.01.09 ~Pr.01.12.
Auto acceleration/deceleration makes the complicated processes of tuning unnecessary. It
makes operation efficient and saves energy by acceleration without stall and deceleration
without brake resistor.
In applications with brake resistor or brake unit, Auto deceleration shall not be used.
Revision August 2008, 2ELE, V1.02 |