Setting Up Parameters
distance is used to guarantee that the motor will not need to backup after the deceleration ramp.
Specified Offset Radio Button
The specified offset allows the user to choose an exact offset from the Home Reference point. The commanded motion will stop at exactly the offset distance away from the reference point as specified. If the specified offset is smaller than the calculated offset, the motor will decelerate to a stop and then back up to its final offset position.
Limit Distance
LimitDistEnable
This checkbox enables the specified Home Limit Distance.
The Limit Distance parameter places an upper limit on the incremental distance traveled during a home. If no home reference is found in this distance, the motor will decelerate to a stop at the limit distance and activate the Home.#.LimitDistHit source.
End of Home Position
This parameter defines the position at the completion of the home. This defaults to 0.0 such that at the end of a home, the Feedback Position and the Commanded Position are set to 0.0. If you wish your Feedback Position to be something other than 0.0 at the end of a home, then enter the exact desired position here.
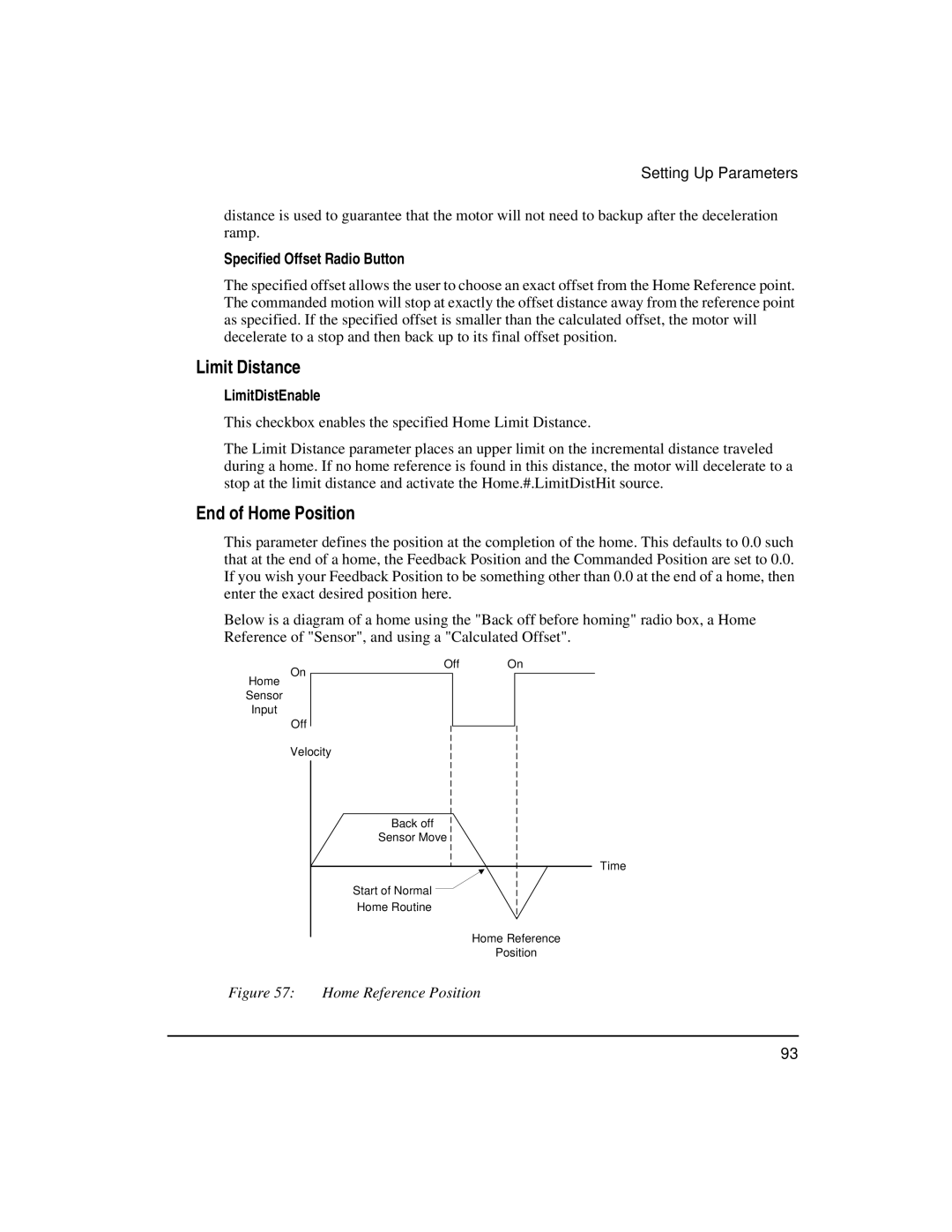
Below is a diagram of a home using the "Back off before homing" radio box, a Home Reference of "Sensor", and using a "Calculated Offset".
Off | On |
On |
|
Home |
|
Sensor |
|
Input |
|
Off |
|
Velocity |
|
Back off |
|
Sensor Move |
|
| Time |
Start of Normal |
|
Home Routine |
|
| Home Reference |
| Position |
Figure 57: Home Reference Position
93