FM-3 Programming Module Reference Manual
Decimal Places
The number of decimal places set in this parameter determines the number of digits after the decimal point used in all torque parameters throughout the software. Using a high number of decimal places will improve torque resolution, but will also limit the maximum torque. You can select from zero to six decimal places of programming resolution.
Scaling
The amount of torque in user torque units will be set equal to the Percent Continuous Current. This parameter is used to scale the actual torque back into the user defined units. The units of this parameter are % ContinuousCurrent. This scaling factor is used along with the user torque to establish a relationship between torque user units and actual torque.
Master Units View
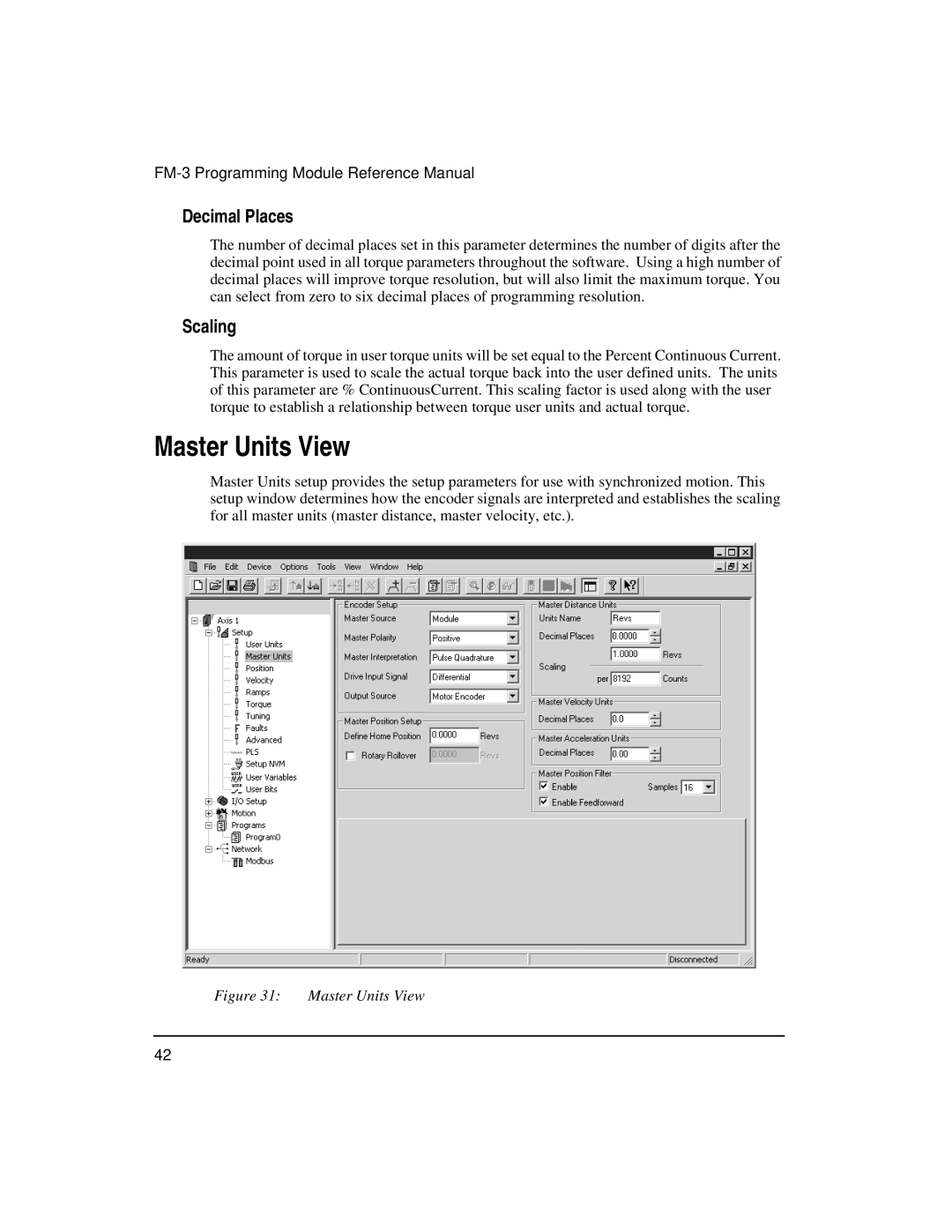
Master Units setup provides the setup parameters for use with synchronized motion. This setup window determines how the encoder signals are interpreted and establishes the scaling for all master units (master distance, master velocity, etc.).
Figure 31: Master Units View
42