Manuals
/
Emerson
/
Computer Equipment
/
Network Card
Emerson
FM-3
manual
TERM-H Head Terminator TERM-T Tail Terminator
Models:
FM-3
1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
292
Download
292 pages
25.45 Kb
268
269
270
271
272
273
274
275
276
277
Specification
Characteristic Distance
Install
Error messages
Cable Diagrams
Position Error Integral Group
Watchdog Timer
Symbols
Online Status Indicators
Dimension
Page 273
Image 273
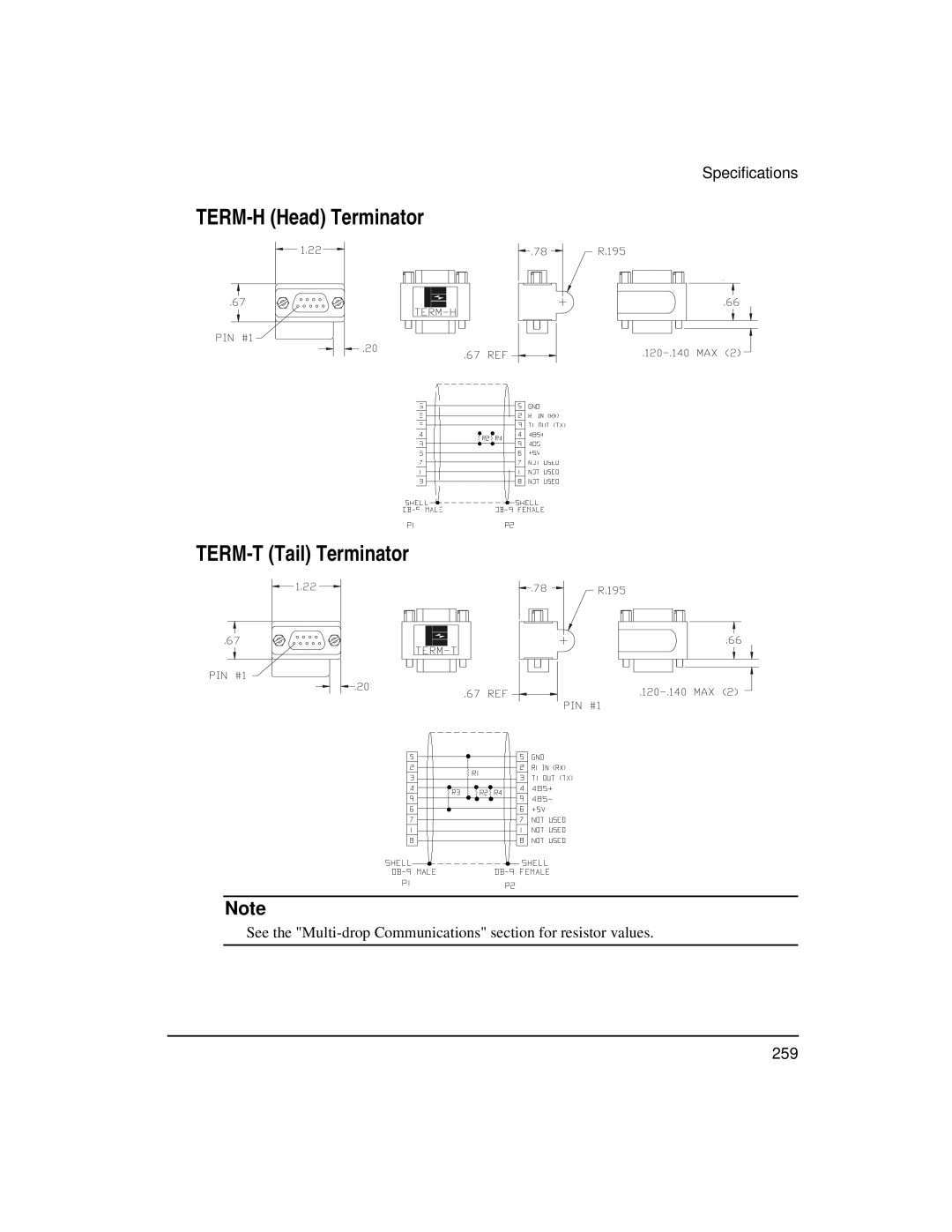
Specifications
TERM-H
(Head) Terminator
TERM-T
(Tail) Terminator
Note
See the
"Multi-drop
Communications" section for resistor values.
259
Page 272
Page 274
Page 273
Image 273
Page 272
Page 274
Contents
Reference Manual
Page
FM-3
Page
952
Customer Support
Website and Email
Technical Support 952 995-8033 or 800
Customer Service Sales 952 995-8000 or 800
Training Services 952 995-8000 or 800
Document Conventions
Application Engineering 952 995-8000 or 800
This Represents
EN EN Only
Reference Materials
Safety Instructions
General Warning
Qualified Person
Setup, Commissioning and Maintenance
Safety Precautions
Safety of Machinery
Enclosure
Viii
Table of Contents
Tuning Procedures
Parameter Descriptions 143 Installation 183
Programming 115
Quick Start
Diagnostics and Troubleshooting 225
Specifications 249
Glossary 265 Index 273
Xii
Introduction
FM-3 Programming Module Reference Manual
PowerTools Pro Setup Software
Features
Software Interface
Hierarchy View
Keypad Interface
Operational Overview
PBus Group
Parameter Screens
How Jogging Works
How Motion Works
How Home Works
Establishing a Home Reference Position
Home Sequence
Marker
Sensor
Sensor and Marker
Accuracy and Repeatability
Home Offset
Calculated Home Offset, Peak Velocity Not Reached
Specified Home Offset, Greater than Calculated Offset
End of Home Position
Home Examples
Home Limit Distance
Example 1 Linear Application
Sensor
Home Sequence
Home Sensor and Marker then Offset, Example
Example 2 Rotary Application
Index Motion Sequence
How Indexes Work
Indexes View
Absolute vs. Incremental
Absolute Indexes
Absolute Index
Incremental Index
Incremental Indexes
Indexes with Rotary Rollover Enabled
Registration Index
Rotary Plus and Rotary Minus Indexes
How Communications Work
Uploading
Downloading
NVM Options for Uploading and Downloading
Uploading
Downloading
Updating to RAM
Download Section
Options/Preferences/Ptools Operation
Upload Section
Upload Non-Volatile Memory NVM Section
Secure Downloading
Brake Operation
Brake Release
Brake Activate
Brake Disengaged
Identification Group
Setup View
Drive Encoder Output Group
Configuration Group
Positive Direction Group
Update Rate Group
Status Online Tab Online Only
Switching Frequency Group
Motor Position Group
Motor Velocity Group
Control Loop Group
Torque Group
Master Feedback Group
Information Tab Online Only
Drive Information Group
Module Information Group
User Units View
Distance Group
Units Name
Characteristic Length
Characteristic Distance
Decimal Places
Scaling
Velocity Group
Enable Separate Distance Units Check Box
Scaled Distance Name
Velocity Distance Units Scale Factor
Acceleration Group
Time Scale List Box
Separate Distance Units Example
Master Units View
Master Units View
Master Position Setup Group
Encoder Setup Group
Master Distance Units
Master Velocity Units
Master Acceleration Units
Enable Check Box
Master Position Filter
Samples
Settings Group
Enable Feedforward Check Box
Position View
Limits Group
Software Travel Limits
Rotary Group
Software Travel Limit +
Software Travel Limit
Online Tab not shown
FeedRate Override
Velocity View
Examples
FeedRate Decel/Accel
Acceleration Type
Ramps View
Stop Deceleration
Ramps Group
Feedhold Decel/Accel
Travel Limit Decel
Torque Level
Torque View
Peak Torque
Online Status Tab
Torque Limit
Tuning View
Load Group
Inertia Ratio
Tuning Group
Position Error Integral Group
Low Pass Filter Group
Time Constant
Faults View
Active Faults Group
Active Faults Window
Power Up Count
Power Up Group
Power Up Time
Total Power Up
PLS View
PLS View
Source
Number of PLS Points
On Point
Off Point
Rollover Point
Rotary Enable
Setup NVM View
Setup NVM View
User Variables View
Name
Decimal
Adding and Deleting Variables
Using Variables in a Program
Online Tab not shown
Initial Value
User Bits View
Adding and Deleting User Bits
Bit Mask Result stored in each bit
User 32-bit Bit Register and User Bit Masking
User Bits Read/Write Process
Configuring the User Bit Mask Register
User Bits Mask View
Setup Group
Assignments
Assignments View
Assignments View
Creating An Assignment
Drag and Drop Method
Deleting An Assignment
Assign Button Method
Delete Button Method
Tying a Source to a Destination
Assignment Polarity
Only Show Assigned
User Level
Assignments that Automatically Use Position Capture
Polarity Button Method
Destinations that use captured data
Selector View
Selector View
Assignment View
Example
Debounce
Input Lines View
Names
Output Lines View
Analog Inputs View
User Units
Decimal
Bandwidth
Read Max/Min Voltage Settings
Maximum Value
Maximum Voltage
Motion Group
Jog Number
Jog View
Jog Name
Time Base
Jog Velocity
Jog Sources and Destinations
Jog Acceleration
Jog Deceleration
Jog.#.Decelerating
Destinations
Jog.PlusActivate
Jog.MinusActivate
Jog Select Details
FM-3 Programming Module Reference Manual
Home View
Home Number
Home Reference
Acceleration
Velocity
Deceleration
If on sensor... Group
LimitDistEnable
Limit Distance
Specified Offset Radio Button
Home Sources and Destinations
Home.#.SensorTrigger
Home.#.Initiate
Index Number
Index View
Index Name
IndexType
Distance/Position
Timed Indexes
Time Checkbox Enabled
Timed Index Profiles
Enable Index PLS
PLS Off Point
PLS On Point
Registration Parameters
Index.AnyCommandComplete
Index Sources and Destinations
Index.#.Accelerating
Index.#.Command In Progress
Index.#.Command Complete
Index.#.AtVel
Index.#.Decelerating
PowerTools Menu Bar Method
Adding and Deleting Indexes
Toolbar Icon Method
Deleting an Index
Right Click Method
Gearing View
108
Stopping Gearing Motion
Initiating Gearing Motion
Motion Stop from a Program
Stopping Motion
MotionStop for an Assignment
Example Program 0 Running on Task
Modbus View
Network Group
112
DeviceNet View
Profibus View
Ethernet View
FM-3 Programming Module Reference Manual 114
Programming
Program Toolbar Icons
Previous Book Mark
Next Book Mark
Delete All Book Marks
Red Dot Help
Disable Error Check
Program Where Am I?
Drag In Variables
Lock Program
Program Instruction Types
Programs
Program Flow Instructions
If/Then/Endif
For Count/Next
Else
Wait For
Do While/Loop
Call Program
Wait For Time
Formula
End
Bit
Bit Or
Label
Motion Instructions
GoTo
Dwell For Time
Index.Initiate
Dwell for Master Dist
Complex Velocity Profile
Index.CompoundInitiate
Index Velocity Profile with Drive Outputs
Home.Initiate
Jog.Stop
Jog.PlusInitiate
Jog.MinusInitiate
Motion Modifiers
Using Last
Gear Stop
Gear.Initiate
Adding and Deleting Programs
PowerTools Menu Bar Method
Toolbar Icon Method
Adding a Program
Run Anytime Programs
Right Click Method
Deleting a Program
133
Example Programs
Resetting Faults in Run Anytime Programs
Out and Return Simple
Out and Return More Complex
Elevator Accumulator with 100 Stop Positions
Simple Jogging within a Program
Rotary Table with Calibrated Stop Positions
Flying Cutoff/Shear
Synchronized Jog with Manual Phase Adjustment
Auger Filler with Inputs to Adjust the Fill Amount
Learn Program Program
Sequence Learn and Playback
140
141
FM-3 Programming Module Reference Manual 142
AbsolutePositionValid
Accelerating
AccelType
AccelUnits.Decimal
AccelUnits.TimeScale
AtVel
CommandingMotion
ClearFollowingError
Brake.Activate
Brake.Disengaged
DistUnits.CharacteristicLength
DistUnits.CharacteristicDist
Decelerating
DefineHome
DistUnits.Decimal
DriveEnableStatus
DistUnits.Name
DriveAmbientTemp
DriveInput.#.DebounceTime
DriveInput.#.ForceEnable
DriveInput.#.Force
DriveInput.#.Name
DriveOutputEncoder.ScalingEnable
DriveOutput.#.ForceEnable
Fault.DriveFaultsBitmap
DriveOutput.#.Name
Fault.DriveOK
Fault.Faulted
Fault.ModuleFaultsBitmap
Fault.#.Active
Fault.Reset
Fault.#.Counts
FeedforwardsEnable
FeedRateDeactivate
FeedholdDecelTime
FeedRateOverride
FoldbackActive
FollowingErrorEnable
FollowingError
FollowingErrorLimit
FoldbackRMS
Gear.CommandInProgrees
Gear.CommandComplete
Gear.Activate
Gear.AtVel
Home.#.Accel
Home.AnyCommandComplete
Home.#.CommandInProgress
Home.#.CommandComplete
Home.#.Accelerating
Home.#.AtVel
Home.#.Decelerating
Home.#.LimitDistEnable
Home.#.EndPosn
Home.#.Initiate
Home.#.OnSensorAction
Home.#.OffsetType
Home.#.Reference
Home.#.SensorTrigger
Index.ResetProfileLimited
Index.AnyCommandComplete
Home.#.TimeBase
Home.#.Vel
Index.#.Accel
Index.#.CommandComplete
Index.#.Accelerating
Index.#.AnalogLimitType
Index.#.CompoundInitiate
Index.#.CommandInProgress
Index.#.Decel
Index.#.Decelerating
Index.#.Initiate
Index.#.PLSEnable
Index.#.LimitDistHit
Index.#.Name
Index.#.PLSStatus
Index.#.RegistrationWindowEnable
Index.#.RegistrationOffset
Index.#.RegistrationType
Index.#.SensorTrigger
Index.#.TimedIndexEnable
Index.#.TimeBase
Index.#.Vel
InPosn
Jog.AnyCommandComplete
InPosnTime
InPosnWindow
Jog.Select0
Jog.#.CommandComplete
Jog.Stop
Jog.#.Accel
Jog.#.Decel
Jog.#.CommandInProgress
Jog.#.Decelerating
Jog.#.MinusInitiate
LineVoltage
ModuleInput.#.ForceEnable
Modbus.BaudRate
Modbus.ModbusId
ModuleInput.#.Name
ModuleOutput.#.ForceEnable
ModuleInput.#.Raw
ModuleInput.#.Status
MotorType
MotionStop
Name
PLS.#.Direction
PLS.#.PLSEnable
PLS Enable
PLS Rollover Enable
PLS.#.RotaryRolloverEnable
PosnErrorIntegralEnable
PosnCommand
PLS.#.RotaryRolloverPosn
PLS.#.Source
PowerStageEnabled
PosnErrorIntegralTimeConstant
PowerUpCount
PowerUpTime
RotaryRolloverEnable
PowerUpTimeTotal
Program.AnyComplete
Program.#.Initiate
Selector.SelectLinesUsed
ShuntPowerRMS
Selector.#.Select
Selector.#.Selection
SoftwareTravelLimitMinusActive
SoftwareTravelLimitEnable
SoftwareTravelLimitMinusPosn
SoftwareTravelLimitPlusActive
TorqueCommandLimited
TorqueCommand
StartUp
Stop
TorqueLevel
TravelLimitDisable
TorqueLevelActive
TorqueLimit
TravelLimitMinusActivate
TorqueLimitEnable
TravelLimitMinusActive
TravelLimitPlusActivate
TorqueUnits.PercentContinuousCurrent
VelCommand
TorqueUnits.Torque
Var.Var#.Decimal
VelocityUnits.DistVelScale
VelocityUnits.Decimal
VelocityUnits.Name
VelocityUnits.ScalingFlag
FM-3 Programming Module Reference Manual 182
Mechanical Installation
Basic Installation Notes
Grip the FM On each side LCD
Modbus Communications
PC System Configuration
Software Installation
Preparing for PowerTools Pro Installation
Installing PowerTools Pro
Starting and Exiting PowerTools
If You Need Help with Installation
Starting the Software
To display Help in PowerTools, do one of the following
Accessing Help
Opening a New File
Exiting the Software
188
Opening a New Configuration Window
Basic Setup Steps
Enter All Setup Data
General Setup View
190
User Units View
Position View
Master Units View
Ramps View
Velocity View
Torque View
Tuning View
PLS View
Making Assignments
196
Jog Setup
Setting Up Motion Parameters
Home Setup
Home Setup View
Index Setup
200
201
Creating a Program
203
204
Example System
Example Application Start Up
Enable Following Error Enable this checkbox
Making Assignments
208
209
210
211
212
PID vs. State-Space
Tuning Procedures
Tuning Procedure
Initial settings
Tuning steps
Fully Optimized Level
General Tuning Hints
Tuning Parameters
Inertia Ratio
Friction
Feedforwards
Response
Line Voltage EN Only
Determining Tuning Parameter Values
Procedure for Determining Friction
Initial Test Settings
Determining Friction
Consider the following before determining the Friction
Rpmh Rpml
Determining Inertia Ratio
Consider the following before determining the inertia
Inertia Measurement Procedure
Conversion Formula
Ramp Units Conversion
223
FM-3 Programming Module Reference Manual 224
Diagnostic Display
Diagnostics and Troubleshooting
Fault Codes
227
Watchdog Timer
Fault Descriptions
Power Up Test
Flash Invalid
Invalid Configuration
FM-3 Fault
Power Module
High DC Bus
Max Following Error
RMS Shunt Power
Encoder State
Encoder Hardware
FM-3 Specific Fault Descriptions
Traj Flt
Isr Ovr
Drv Syn
Watchdg
DvOvrTmp
Mtr Tmp
Inv Parm Inv NVM
Pwr On FlwErr
Analog Outputs
Analog Output Scale units
Diagnostic Output Test Points
Diagnostic Analog Output Test Points
237
Error Messages
Drive Faults
Resetting Faults
Viewing Active Drive Faults
Error The maximum limit of Instances is reached
Non-Programming Error Messages
Error Your Application is not valid to download
Programming Error Messages
Error a FM3 number’s mantissa must be between -2147483647
FYI Your Application has
Error Couldnt find named Variable
Error Can only compare,,etc numeric results
Error Couldnt find named Variable from Text
Error Program Instance does not Exist
Error Text Strings are limited to 12 characters
Error Syntax error encountered
Error The destination variable does not accept Data
Error The destination variable is Read Only
243
Error This is not a fully qualified variable
Error This instance does not exist
Error This variable cannot be assigned a selection value
Error This variable type cannot be assigned a value
Watch Window
Online Status Indicators
246
Motion Status
Global Where Am I Button
FM-3 Programming Module Reference Manual 248
Dimensions and Clearances
Specifications
250
Cable Diagrams
SNCE-XXX Cable SNCDD-001.5 Cable
SNCO-003 Cable SNCI-003 Cable
SNCLI-003 Cable
CMDX-XXX Cable
CMDO-XXX Cable
CDRO-XXX Cable
TIA-XXX Cable DDS-XXX Cable
TERM-H Head Terminator TERM-T Tail Terminator
CMDS-XXX Cable CMMS-XXX Cable
CFCS-XXX Cable
CFCO-XXX Cable
CFOS-XXX Cable
FM-3 Programming Module Reference Manual 264
Axis
Amplifier
Baud Rate
Check Box
Destination
Configuration
Dialog Box
DIN Rail
Firmware
Global Where Am
Flash
Flash File
Input Line
Input Function
Jog
Least Significant Bit
Opto-isolated
Option Button
Output Function
Output Line
Radio Button
PowerTools Pro
Serial Port
Travel Limit
Variable
View
Windows, Microsoft
FM-3 Programming Module Reference Manual 272
Index
Symbols
274
275
FM-3 Programming Module Reference Manual 276
Top
Page
Image
Contents