Setting Up Parameters
Gearing View
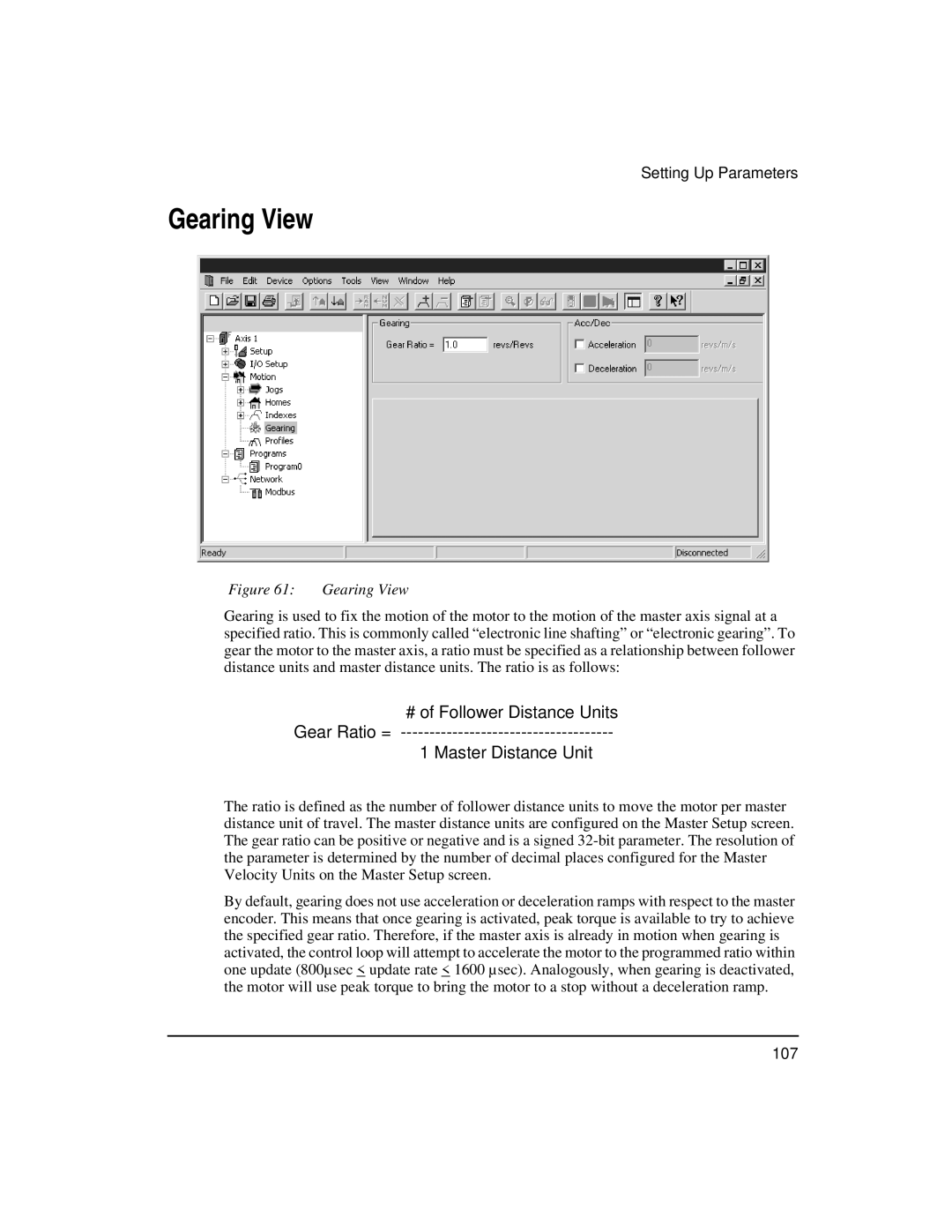
Figure 61: | Gearing View |
Gearing is used to fix the motion of the motor to the motion of the master axis signal at a specified ratio. This is commonly called “electronic line shafting” or “electronic gearing”. To gear the motor to the master axis, a ratio must be specified as a relationship between follower distance units and master distance units. The ratio is as follows:
# of Follower Distance Units
Gear Ratio =
1 Master Distance Unit
The ratio is defined as the number of follower distance units to move the motor per master distance unit of travel. The master distance units are configured on the Master Setup screen. The gear ratio can be positive or negative and is a signed
By default, gearing does not use acceleration or deceleration ramps with respect to the master encoder. This means that once gearing is activated, peak torque is available to try to achieve the specified gear ratio. Therefore, if the master axis is already in motion when gearing is activated, the control loop will attempt to accelerate the motor to the programmed ratio within one update (800µsec < update rate < 1600 µsec). Analogously, when gearing is deactivated, the motor will use peak torque to bring the motor to a stop without a deceleration ramp.
107