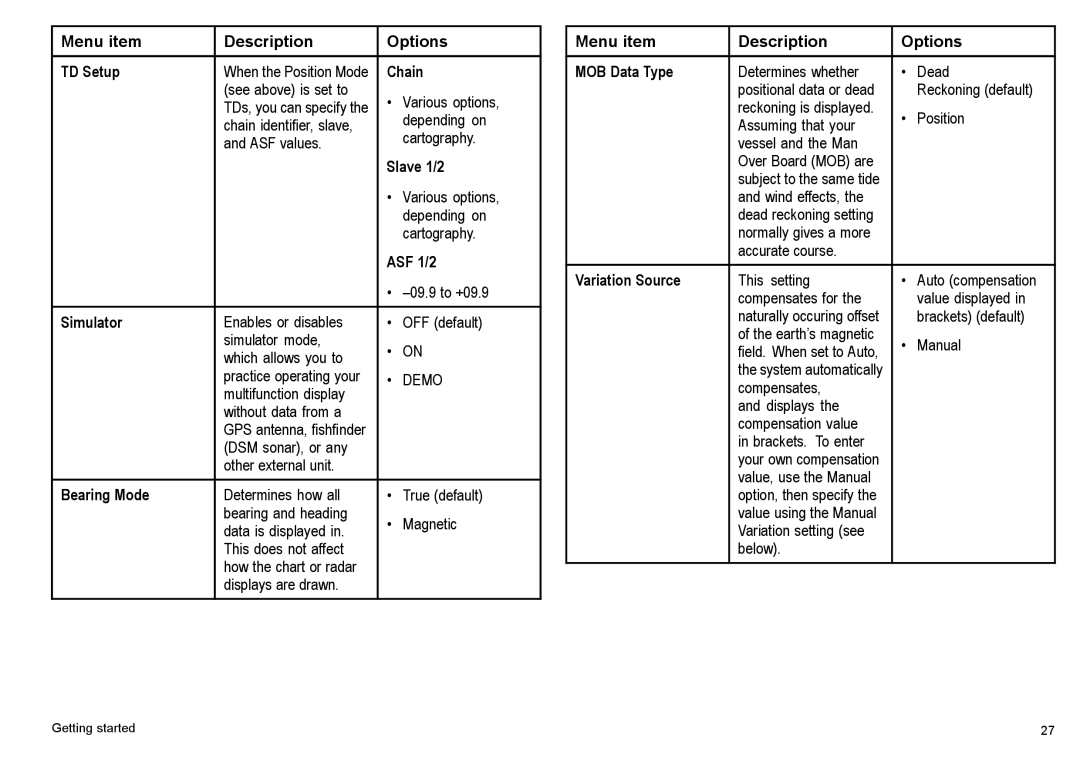
Menu item | Description | Options | |
TD Setup | When the Position Mode | Chain | |
| (see above) is set to | • | Various options, |
| TDs, you can specify the | ||
| chain identifier, slave, |
| depending on |
| and ASF values. |
| cartography. |
|
| Slave 1/2 | |
|
| • | Various options, |
|
|
| depending on |
|
|
| cartography. |
|
| ASF 1/2 | |
|
| • | |
|
|
|
|
Simulator | Enables or disables | • | OFF (default) |
| simulator mode, | • | ON |
| which allows you to | ||
| practice operating your | • | DEMO |
| multifunction display |
|
|
| without data from a |
|
|
| GPS antenna, fishfinder |
|
|
| (DSM sonar), or any |
|
|
| other external unit. |
|
|
Bearing Mode | Determines how all | • | True (default) |
| bearing and heading | • | Magnetic |
| data is displayed in. | ||
| This does not affect |
|
|
| how the chart or radar |
|
|
| displays are drawn. |
|
|
Menu item | Description | Options | |
MOB Data Type | Determines whether | • | Dead |
| positional data or dead |
| Reckoning (default) |
| reckoning is displayed. | • | Position |
| Assuming that your | ||
| vessel and the Man |
|
|
| Over Board (MOB) are |
|
|
| subject to the same tide |
|
|
| and wind effects, the |
|
|
| dead reckoning setting |
|
|
| normally gives a more |
|
|
| accurate course. |
|
|
Variation Source | This setting | • | Auto (compensation |
| compensates for the |
| value displayed in |
| naturally occuring offset |
| brackets) (default) |
| of the earth’s magnetic | • | Manual |
| field. When set to Auto, | ||
| the system automatically |
|
|
| compensates, |
|
|
| and displays the |
|
|
| compensation value |
|
|
| in brackets. To enter |
|
|
| your own compensation |
|
|
| value, use the Manual |
|
|
| option, then specify the |
|
|
| value using the Manual |
|
|
| Variation setting (see |
|
|
| below). |
|
|
Getting started | 27 |