•Icon animated - fishfinder is operating.
•Icon static - the fishfinder transducer is connected but not transmitting.
•Icon
12.2 The sonar image
Interpreting the seabed using sonar
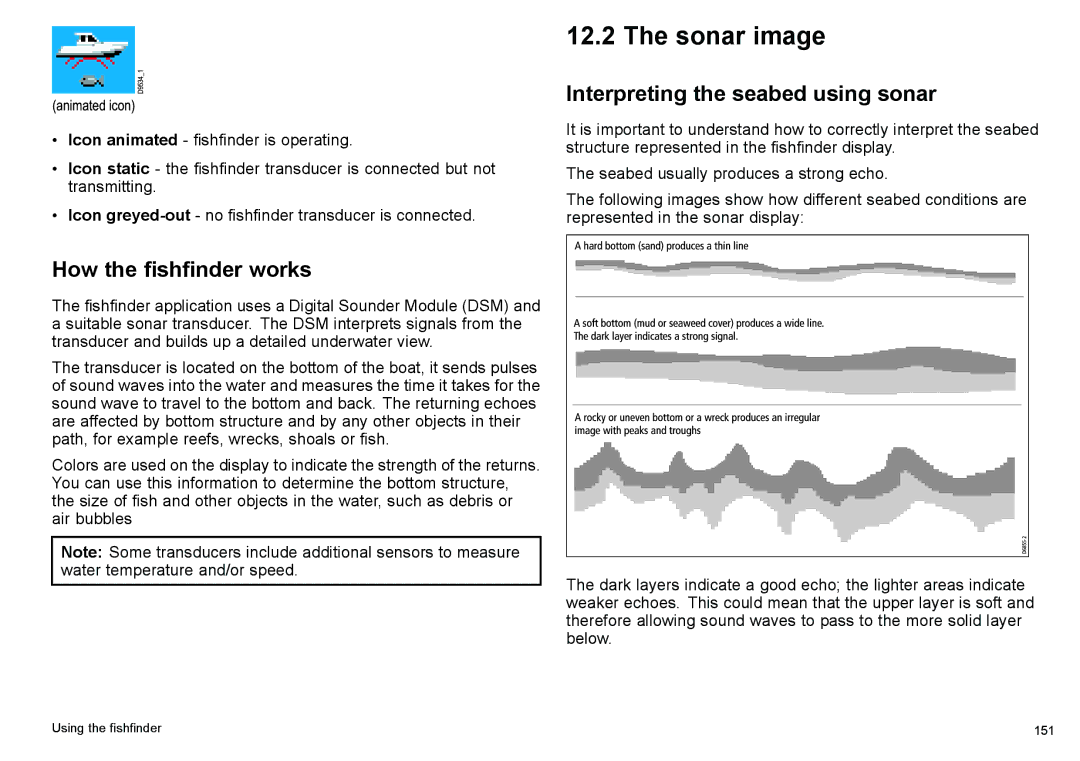
It is important to understand how to correctly interpret the seabed structure represented in the fishfinder display.
The seabed usually produces a strong echo.
The following images show how different seabed conditions are represented in the sonar display:
How the fishfinder works
The fishfinder application uses a Digital Sounder Module (DSM) and a suitable sonar transducer. The DSM interprets signals from the transducer and builds up a detailed underwater view.
The transducer is located on the bottom of the boat, it sends pulses of sound waves into the water and measures the time it takes for the sound wave to travel to the bottom and back. The returning echoes are affected by bottom structure and by any other objects in their path, for example reefs, wrecks, shoals or fish.
Colors are used on the display to indicate the strength of the returns. You can use this information to determine the bottom structure, the size of fish and other objects in the water, such as debris or air bubbles
Note: Some transducers include additional sensors to measure
water temperature and/or speed.
The dark layers indicate a good echo; the lighter areas indicate weaker echoes. This could mean that the upper layer is soft and therefore allowing sound waves to pass to the more solid layer below.
Using the fishfinder | 151 |