|
|
|
| www.supportme.net |
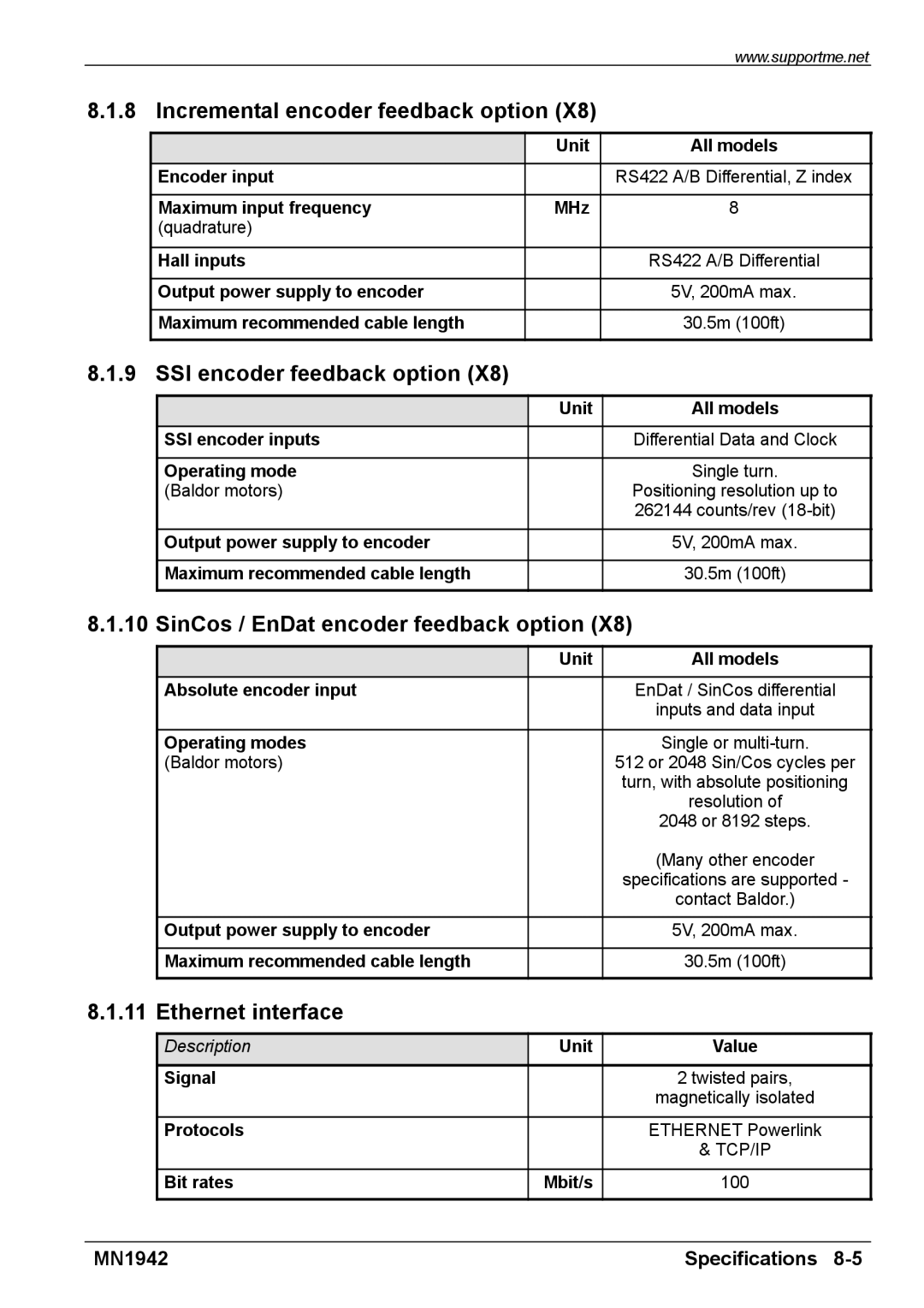
8.1.8 Incremental encoder feedback option (X8) |
|
| ||
|
|
|
|
|
|
| Unit |
| All models |
| Encoder input |
|
| RS422 A/B Differential, Z index |
|
|
|
|
|
| Maximum input frequency | MHz | 8 | |
| (quadrature) |
|
|
|
|
|
|
|
|
| Hall inputs |
|
| RS422 A/B Differential |
|
|
|
|
|
| Output power supply to encoder |
|
| 5V, 200mA max. |
|
|
|
|
|
| Maximum recommended cable length |
|
| 30.5m (100ft) |
|
|
|
|
|
8.1.9 SSI encoder feedback option (X8) |
|
|
| |
|
|
|
|
|
|
| Unit |
| All models |
| SSI encoder inputs |
|
| Differential Data and Clock |
|
|
|
|
|
| Operating mode |
|
| Single turn. |
| (Baldor motors) |
|
| Positioning resolution up to |
|
|
|
| 262144 counts/rev |
|
|
|
|
|
| Output power supply to encoder |
|
| 5V, 200mA max. |
|
|
|
|
|
| Maximum recommended cable length |
|
| 30.5m (100ft) |
|
|
|
| |
8.1.10 SinCos / EnDat encoder feedback option (X8) | ||||
|
|
|
|
|
|
| Unit |
| All models |
| Absolute encoder input |
|
| EnDat / SinCos differential |
|
|
|
| inputs and data input |
|
|
|
|
|
| Operating modes |
|
| Single or |
| (Baldor motors) |
|
| 512 or 2048 Sin/Cos cycles per |
|
|
|
| turn, with absolute positioning |
|
|
|
| resolution of |
|
|
|
| 2048 or 8192 steps. |
|
|
|
| (Many other encoder |
|
|
|
| specifications are supported - |
|
|
|
| contact Baldor.) |
|
|
|
|
|
| Output power supply to encoder |
|
| 5V, 200mA max. |
|
|
|
|
|
| Maximum recommended cable length |
|
| 30.5m (100ft) |
|
|
|
|
|
8.1.11 Ethernet interface |
|
|
| |
|
|
|
|
|
| Description | Unit |
| Value |
| Signal |
|
| 2 twisted pairs, |
|
|
|
| magnetically isolated |
|
|
|
|
|
| Protocols |
|
| ETHERNET Powerlink |
|
|
|
| & TCP/IP |
|
|
|
|
|
| Bit rates | Mbit/s |
| 100 |
|
|
|
|
|
MN1942 | Specifications |