MN1942
Control
TORQUEDEMAND
ACCELDEMAND
VELDEMAND
KPROP
KINT
KINTMODE
FOLERROR KINTLIMIT
KDERIV
POSDEMAND
PID
+
Position controller
|
|
| Torque control |
|
| DRIVEBUSVOLTS |
| Bus Voltage | ||
|
|
|
|
|
| Measurement | ||||
KVELFF | KACCEL |
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
| KIPROP | EFFORT |
|
|
|
|
|
|
|
|
| KIINT |
|
| |
|
|
| Torque filters | Limiting |
|
|
|
| ||
|
| T |
| KITRACK |
|
|
| |||
+ | + |
|
| + |
| PI + TF | PWM |
|
| |
P |
|
|
|
|
| |||||
|
|
|
|
|
|
| ||||
+ | + | Control mode |
|
|
| Current controllers |
| Motor | ||
|
|
|
|
| ||||||
Control mode |
| TORQUEFILTERTYPE | TORQUELIMITPOS |
|
| |||||
| switch |
|
|
|
|
| ||||
| TORQUEFILTERFREQ | TORQUELIMITNEG |
|
|
|
|
| |||
switch |
|
| TORQUEFILTERBAND | CURRENTLIMIT |
|
|
|
|
| |
|
| Electrical angle | TORQUEFILTERDEPTH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
| Measured torque and |
|
|
|
|
| ||
|
|
| magnetising currents |
| Current | Offset | U | Current | ||
|
|
|
|
|
|
| V | |||
|
|
|
|
|
|
| Conv | Comp | Sensors | |
|
|
|
|
| CURRENTMEAS |
| ||||
|
| Commutation |
|
|
|
|
| |||
|
|
|
| Temperature drift |
|
|
| |||
|
|
|
|
|
|
|
|
| ||
|
|
|
|
|
|
| compensation |
|
|
|
KVEL |
| VEL |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Universal |
|
| |
|
|
|
|
|
|
|
|
| E | |
|
|
|
|
|
|
|
| Encoder |
| |
|
| POS |
|
|
|
|
| Interface |
|
|
|
|
|
|
|
|
|
|
|
| Encoder |
System B-5
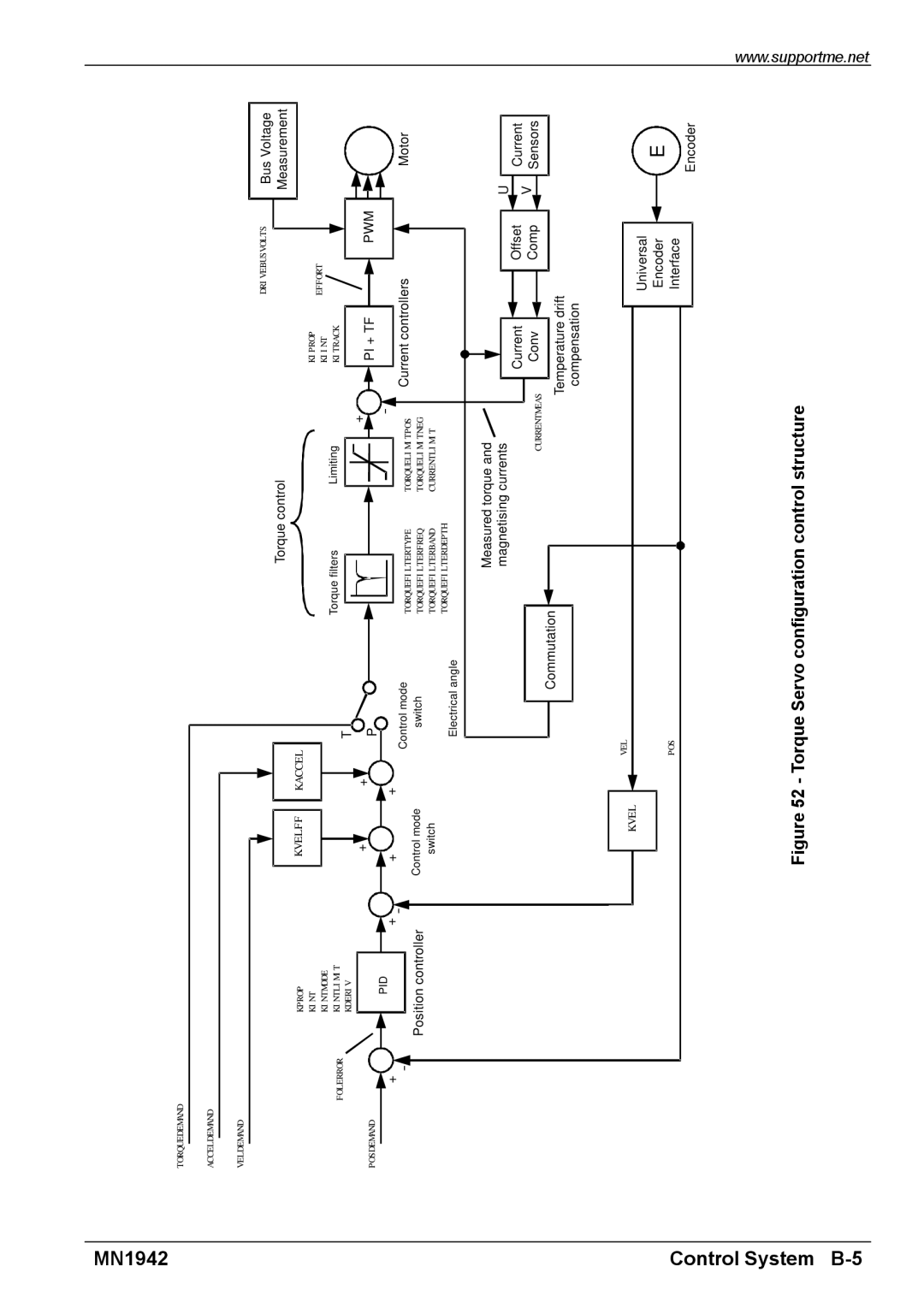
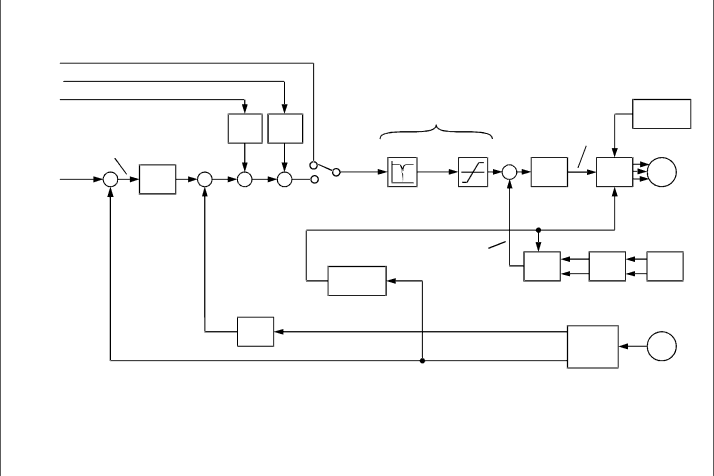
Figure 52 - Torque Servo configuration control structure
www.supportme.net