NovaJet Series
Novajet
Printing history
FCC Statement U.S.A
User Instructions
VDE Statement
Material Safety Data Sheet
Warranty or Damage Claims
Table of Contents
Maintenance
Troubleshooting
Printer Output is Banding Horizontally and Vertically
100
Assembly\Disassembly
Install the Carriage Assembly, Carriage Belt,
Remove the Lower Roller Assembly, Stepper Motor
Install the Y-Arm Assembly, Pinch Rollers, Slide Shaft,
Parts List
List of Illustrations
Xviii
Xix
Encoder Sensor AutoLoad Paper Sensor
Assembly/Disassembly
105
Xxii
List of Tables
General Description
Introduction
General Description
Electrostatic Discharge ESD Sensitivity
Overview
Related Publications
Followed by a paragraph describing the concern
Printer Specifications
Environment Weight NJ850 NJ880
Dimensions
General Description
Help Desk FAX
Technical Support
Help Desk Telephone
Theory of Operation
NovaJet 800 Series Printers General Block Diagram
General Block Diagram
Paper Media Axis Drive
Paper Media Axis Drive
Carriage Axis Drive
Carriage Axis Drive
Power Feed and Take-Up System
Media Feed and Take-Up System
Main PWA Printed Wiring Assembly
Main PWA Printed Wiring Assembly
Main PWA LED Status Indicators
Gate Array
Memory Circuits
Sdram
Theory of Operation
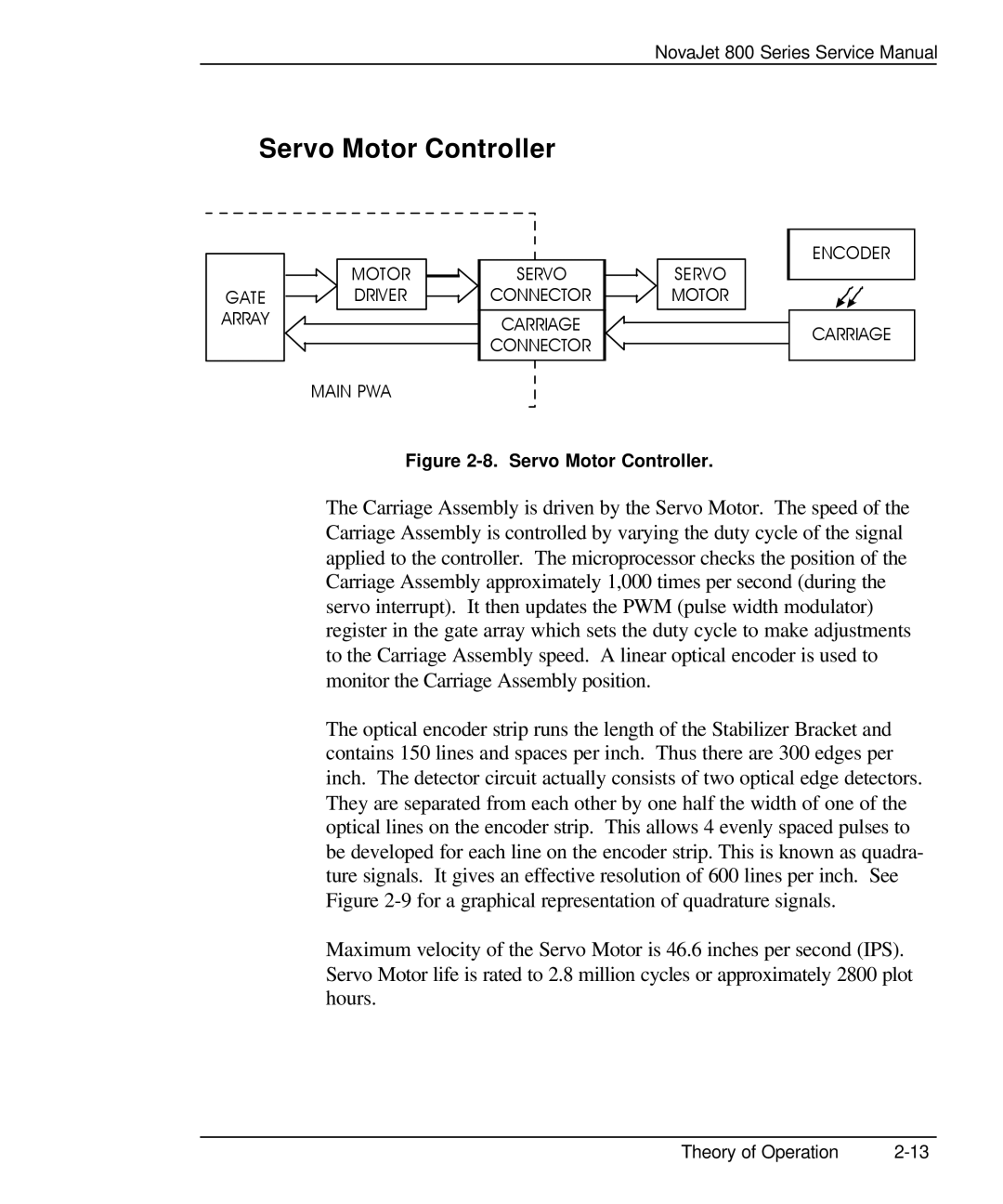
Servo Motor Controller
Quadrature Signal Generation
Interface Circuits Serial & Parallel
Carriage Assembly Circuits
11. Carriage Assembly Circuits
Theory of Operation
Power Supply
Control Panel
Thermal Dryer Assembly
Sensor Status Menu
Beeper and Fans
Maintenance
Scheduled Maintenance
Slide Shaft Cleaning
Cleaning Procedures
External Cleaning
Service Station Cleaning
To clean the slide shaft
Linear Encoder Strip Cleaning
To clean the Encoder Strip
To clean the Trailing Cables
Trailing Cables Cleaning
Platen/Vacuum Hole Cleaning
Cartridge Dimples Cleaning
Cartridge Dimple Region
Flex Cable Contact Cleaning
Flex Cable Contacts
Clean and Inspect Carriage Assembly
Clean and Inspect Stepper Motor Gears
Clean and Inspect Main PWA
Dryer Cleaning
Reseat Connectors on Main PWA and Carriage Boards
Keypad J18 Connect Power U24 PC133 Sdram Dimm socket
Carriage PWA Connection Locations
Ribbon Connector Locking Mechanism
Replace Trailing Cables
Replace Carriage Cover/Carriage Bushings
Servo Motor Winding Resistance Check
Servo Motor
Stepper Motor Winding Resistance Check
Stepper Motor
Power Feed and Take-Up Motor Winding Resistance Check
Banding Hardware vs Software
Banding Differences
Hardwaresoftware
Maintenance
Banding Causes & Quick Analysis Horizontal Banding Problems
Page
Maintenance
Vertical Banding Problems
Line Quality Problems Overspray
Alignments/Adjustments
Slide Shaft Profile Adjustment
Zero Gauge Tighten SET Screw not Shown Shaft Mounting Block
Measure
Head Height Alignment Procedure
13. Slide Shaft Profile Adjustment
Cartridge JET Plate
16. Zeroing the Micrometer Gauge
Page
Color Calibration
To perform the Color Calibration
18. Vert. and Horiz. Color Calibration
Vertical Vert. Calib Test Horizontal Horiz. Calib Test Exit
Deadband Alignments
Selected
To perform the Slow Deadband Alignment
22. Slow Deadband
23. Service Menu
Color Deadband Alignment
To perform the Color Deadband Alignments
Left Color Db Test Right Exit
To perform the paper axis procedure
Paper Axis Calibration
Diagnostics Menu
33 or 83.82 cm
Servo PWM Test
Page
Firmware Download/Upgrading for the PC
To download new firmware to your printer
Firmware Download/Upgrading for the MAC
Internal Cabling and Signal Flow Diagrams
31. Carriage PWA Connections Diagram
Leg Harness Connections Diagram
Troubleshooting
No Power
Initialization Failure
Dimm
Media Does Not Move
Internal Error Carriage Axis Failure
Internal Error Encoder Sensor Failure
Internal Error Paper Sensor Failure
Internal Error Auto-Load Paper Sensor Failure
Internal Error Mpcb Failure
Unrecognized Cartridges Error
Does Not Print
Media Sen Ref. Pts Not Initialized NJ880 only
Image Skews or Moves
Bad Mpwa
Ink Cartridge Misfiring
Printer Output is Banding Horizontal
Ink Cartridge
Paper Skewing
Cont
Printer Output is
Banding Horz
Printer Output is Banding Vertical
Printer Output is Banding Horizontally and Vertically
Keypad Locked-Up or Not Functioning Properly
Noisy Operation
Line Quality Degraded
Color calibration Perform Color Needed Calibration Deadband
Replace Mpwa
Media Feed Motor Not Operating Sensor Works
Media Feed or Take-Up Sensors Not Operating
Symptoms Possible cause Solution
Print Quality Issues Cartridge Misfires Intermittent Banding
Failure Analysis Print Misfires
Excessive Ink Pressure
Dirty Service Station
Unseated Flex Driver Cable
Damaged Flex Driver Cable
Unseated or Defective Trailing Cable
Common Misfire Problems
11. Stall Configuration
Clearing Cartridge Misfires
Multiple Cartridge Failures
14. Service Station
Microbanding
16. Catastrophic Jet Failure
20. Microbanding
22. Ink Cartridge Configurations
Horizontal Banding
23. Defective Magenta Cartridge
24. AutoWipe Interference
26. Unseated or Defective Trailing Cables
27. ESD Problems
29. Carriage Head Strike
32. Test Print
34. Defective Carriage PWA Color Test
36. Defective Stepper Motor
37. Servo System Synchronization Failure
39. Connectivity Problem
41. Main PWA Failures
42. RIP Problem
Vertical Banding
44. Dirty or Worn Carriage Bushings
46. Defective Trailing Cable Examples
47. Dirty Encoder Strip
49. RIP Error Page Layout Violation
Cartridge Warranty
50. ESD Problem
Cartridge Maintenance & Testing
51. Jet Out Detection
Common Misfire Problems
General Print Misfire Analysis
Cartridge Misfires
Multiple Cartridge Failures
53. Service Station Cleaning
Ink Starvation
Inkjet Nozzle Problems
Ink Starvation
Ink System Pressure Theory
55. Ghosting
Failure Analysis
56. Cartridge Tubing Needle and Septum
57 Jet Cartridge
59. Reservoirs and Ink Delivery System
Ink Dropout
60. Excessive Ink Pressure
61. Excessive Ink PreHeat Settings
Page
Color Test Problems
62. Dirty Service Station Problem
Failure Analysis Color Test Incorrect
63. Normal Color Test 3 Pass
65. Cartridge Tubing Needle and Septum
Unrecognized Cartridge Error Message
Unrecognized Cartridge Failure Analysis Steps
67. Cartridge Identification Chip
Paper Sensor Error
68. Flex Driver Cable
69. Paper Sensor
Loading Media Failure
Encoder Sensor Error
70. Paper Sensor Location
AutoLoad Paper Sensor Error
Carriage Tracking Failure
Carriage Axis Error
Carriage Axis Failure
73. Carriage Head Assembly
Carriage Test
75. Dirty or Defective Encoder Strip
Page
76. Main PWA Trailing Cable Connection
77. Boot ROM Access Function
Initialization Failure
78. Main PWA LED Operation
Page
80. Paper Sensor
Quick Troubleshooting List
81. Main PWA LED Operation
Noise in Image
Functional Problems
Inconsistent Operations
Dryer Failure/Sensor Error
ESD Problems
85. Main PWA Humidity Sensor
Troubleshooting
Reading that was sampled when the detected error occurred
86. Dryer LEDs
Intermittent Problems/Continuity
88. Internal Test Print
89. SEH Activated Test Pattern
91. Driver/RIP Problem
93. ESD Problems
94. Servo Cycle/PWM Menu
96. Servo System Synchronization Error
98. Probable Defective Carriage PWA
100. Corrupted Code Main PWA
102. Apparent Ink Overspray
105. Text Field Problem
Reinitializing the Printer
Printer Hesitation/Networking Problems
Data Starvation
Compute Bound
108. Printer Hesitation Causes
Miscellaneous Notes
Network Connectivity
To activate an E-Connect Test
109. E-Connect LEDs
Other port testing procedures
Parallel Port Test
Firmware Downloading Procedures NJ850 Printer
112. Demo Print
Troubleshooting
Expanded Instructions for Firmware Download/Upgrade
NJ880 Printer
Internet
Media Handling System Failure
114. Media Handling System
Assembly\Disassembly5
Introduction
Remove the Left, Top, and Right Covers
To remove the Top Cover
To remove the Right Cover Assembly
Right Cover Assembly Removal/Installation
To remove the Left Cover Assembly
Left Cover Removal/Installation
To install the Right Cover Assembly
Install the Left, Top, and Right Covers
To install the Left Cover
Remove the E-Connect Network Assembly
To install the Top Cover
Install the E-Connect Network Assembly
E-Connect Assembly Installation/Removal
Keypad and Display Installation/Removal
Remove the Keypad and Display
Install the Keypad and Display
Keypad and Display Grounding Connections
Memory Module Removal/Installation
Remove Memory Module
Install Memory Module
Remove the Main Printed Wiring Assembly PWA
Page
Main PWA Removal
Install the Main Printed Wiring Assembly PWA
Remove Power Supply, Cooling Fan, and AC Entry Module
Power Supply Removal
To remove the Cooling Fan and AC Entry Module
Install the Power Supply, Cooling Fan, and AC Entry Module
To install the Cooling Fan and AC Entry Module
Remove Servo Motor
10. Using the Belt Removal Tool
Install Servo Motor
Remove the Ink Delivery System
11. Chain Guide Removal
12. Left Side of Ink Delivery System
Install the Ink Delivery System
14. Using the Belt Removal Tool
15. Electronics Covers Removal
16. Strain Relief Removal/Installation
17. Carriage Belt Clamp
18. Carriage Coupler Installation
19. Left Carriage Installation
Page
Remove the Carriage PWA
Latch TAB Slot
Install the Carriage PWA
Remove the Paper Sensor or the Encoder Sensor
21. Paper and Encoder Sensor Removal
Page
Install the Paper Sensor or the Encoder Sensor
To install the Paper Sensor
To install the Encoder Sensor
Replacing the Floating Carriage Cover Bushings
23. Floating Carriage Cover Bushing Removal
Replacing the Carriage Bushings
24. Carriage Bushing Removal
Remove the Service Station
Tabs
Install the Service Station
Remove the Trailing Cable Assembly
Install the Trailing Cable Assembly
Chain Support Bracket Rests On the TOP Y-ARM Assembly
Remove the Stabilizer Bracket and Encoder Strip
Install the Stabilizer Bracket and Encoder Strip
28. Y-Arm Installation/Removal
29. Pinch Roller
Page
Remove the Gap Sensor NovaJet 880 only
To remove the print gap sensor
Page
Page
30. Stepper Motor Removal/Installation
Page
31. Inside Platen, Right Side
Page
Avoid damaging the encoder strip
Page
Lower Roller Installation Tip NovaJet
Arm Assembly Installation Tip NovaJet
Page
32. Media Take-Up and Feed Sensor Removal
Install the Media Take-Up and Feed Motors
Remove the Media Take-Up and Feed Motors
Remove the Thermal Dryer Assembly
Turned off
Install the Thermal Dryer Assembly
Remove the Thermal Dryer Right Endcap Assembly
This assembly emits heat by radiation
Install the Thermal Dryer Right Endcap Assembly
Fan Element, Right Conn Thermistor Element, Left Conn
Parts List
Figure Item Part Name
Left Side Parts Breakdown
Trailing CABLES, Assembly
Platen and Above Parts Breakdown
Cover ASSEMBLY, with Keypad
Right Side Parts Breakdown
HARNESS, DRYER/WINDER
Inner Platen Parts Breakdown
Encoder Sensor W/FLEX
Carriage Assembly Parts Breakdown
SUPPORT, LEFT, Carriage
Floating Carriage Cover Parts Breakdown
Figure Item
Service Station Parts Breakdown
Cradle DRIVE, Assy Motor 7 and Gear
Power Feed and Take-Up Parts Breakdown
Index