Assignment of references from a network
Reference parameters
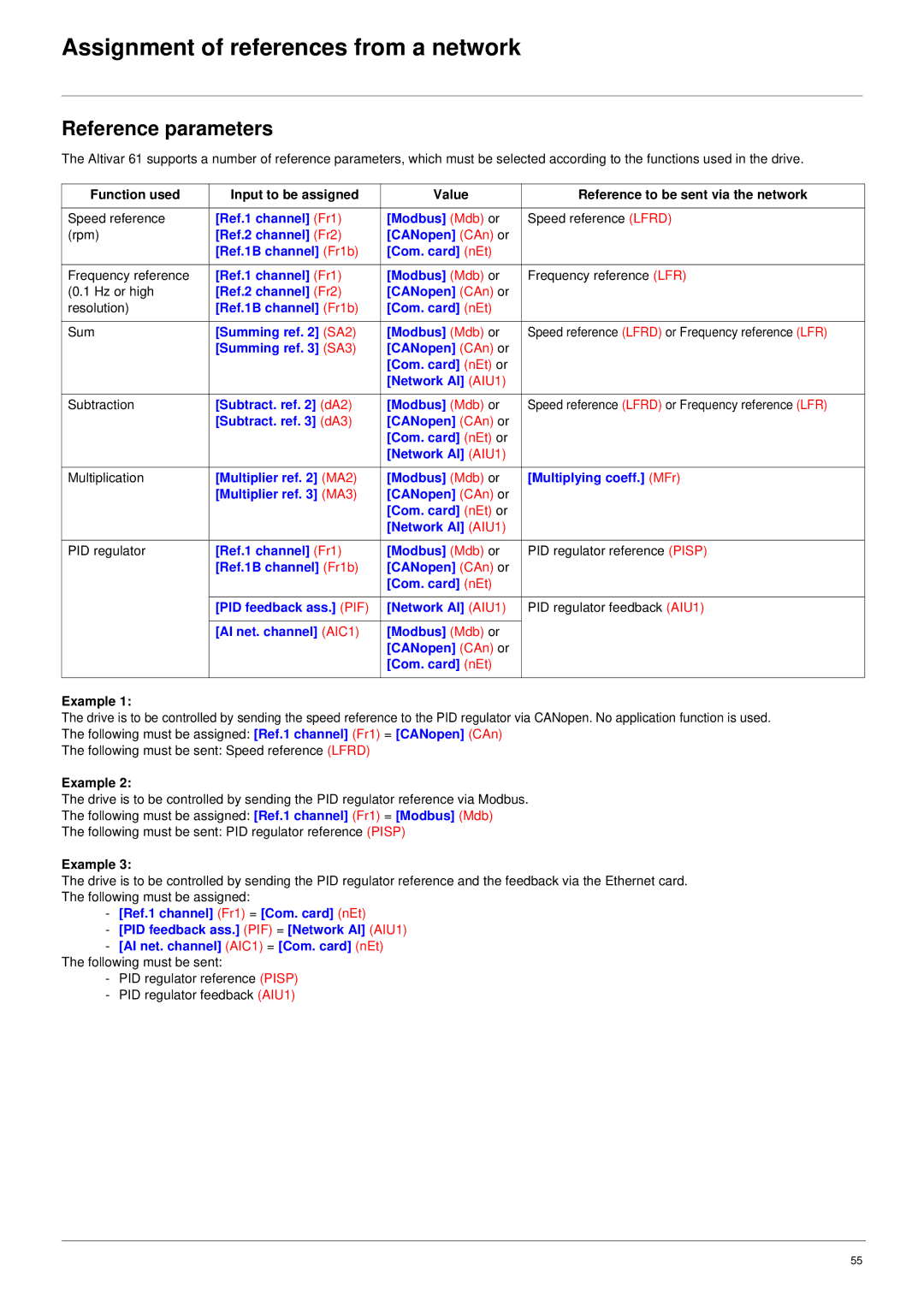
The Altivar 61 supports a number of reference parameters, which must be selected according to the functions used in the drive.
Function used | Input to be assigned | Value | Reference to be sent via the network |
|
|
|
|
Speed reference | [Ref.1 channel] (Fr1) | [Modbus] (Mdb) or | Speed reference (LFRD) |
(rpm) | [Ref.2 channel] (Fr2) | [CANopen] (CAn) or |
|
| [Ref.1B channel] (Fr1b) | [Com. card] (nEt) |
|
|
|
|
|
Frequency reference | [Ref.1 channel] (Fr1) | [Modbus] (Mdb) or | Frequency reference (LFR) |
(0.1 Hz or high | [Ref.2 channel] (Fr2) | [CANopen] (CAn) or |
|
resolution) | [Ref.1B channel] (Fr1b) | [Com. card] (nEt) |
|
|
|
|
|
Sum | [Summing ref. 2] (SA2) | [Modbus] (Mdb) or | Speed reference (LFRD) or Frequency reference (LFR) |
| [Summing ref. 3] (SA3) | [CANopen] (CAn) or |
|
|
| [Com. card] (nEt) or |
|
|
| [Network AI] (AIU1) |
|
|
|
|
|
Subtraction | [Subtract. ref. 2] (dA2) | [Modbus] (Mdb) or | Speed reference (LFRD) or Frequency reference (LFR) |
| [Subtract. ref. 3] (dA3) | [CANopen] (CAn) or |
|
|
| [Com. card] (nEt) or |
|
|
| [Network AI] (AIU1) |
|
|
|
|
|
Multiplication | [Multiplier ref. 2] (MA2) | [Modbus] (Mdb) or | [Multiplying coeff.] (MFr) |
| [Multiplier ref. 3] (MA3) | [CANopen] (CAn) or |
|
|
| [Com. card] (nEt) or |
|
|
| [Network AI] (AIU1) |
|
|
|
|
|
PID regulator | [Ref.1 channel] (Fr1) | [Modbus] (Mdb) or | PID regulator reference (PISP) |
| [Ref.1B channel] (Fr1b) | [CANopen] (CAn) or |
|
|
| [Com. card] (nEt) |
|
|
|
|
|
| [PID feedback ass.] (PIF) | [Network AI] (AIU1) | PID regulator feedback (AIU1) |
|
|
|
|
| [AI net. channel] (AIC1) | [Modbus] (Mdb) or |
|
|
| [CANopen] (CAn) or |
|
|
| [Com. card] (nEt) |
|
|
|
|
|
Example 1:
The drive is to be controlled by sending the speed reference to the PID regulator via CANopen. No application function is used. The following must be assigned: [Ref.1 channel] (Fr1) = [CANopen] (CAn)
The following must be sent: Speed reference (LFRD)
Example 2:
The drive is to be controlled by sending the PID regulator reference via Modbus.
The following must be assigned: [Ref.1 channel] (Fr1) = [Modbus] (Mdb)
The following must be sent: PID regulator reference (PISP)
Example 3:
The drive is to be controlled by sending the PID regulator reference and the feedback via the Ethernet card. The following must be assigned:
-[Ref.1 channel] (Fr1) = [Com. card] (nEt)
-[PID feedback ass.] (PIF) = [Network AI] (AIU1)
-[AI net. channel] (AIC1) = [Com. card] (nEt) The following must be sent:
-PID regulator reference (PISP)
-PID regulator feedback (AIU1)
55