Presentation
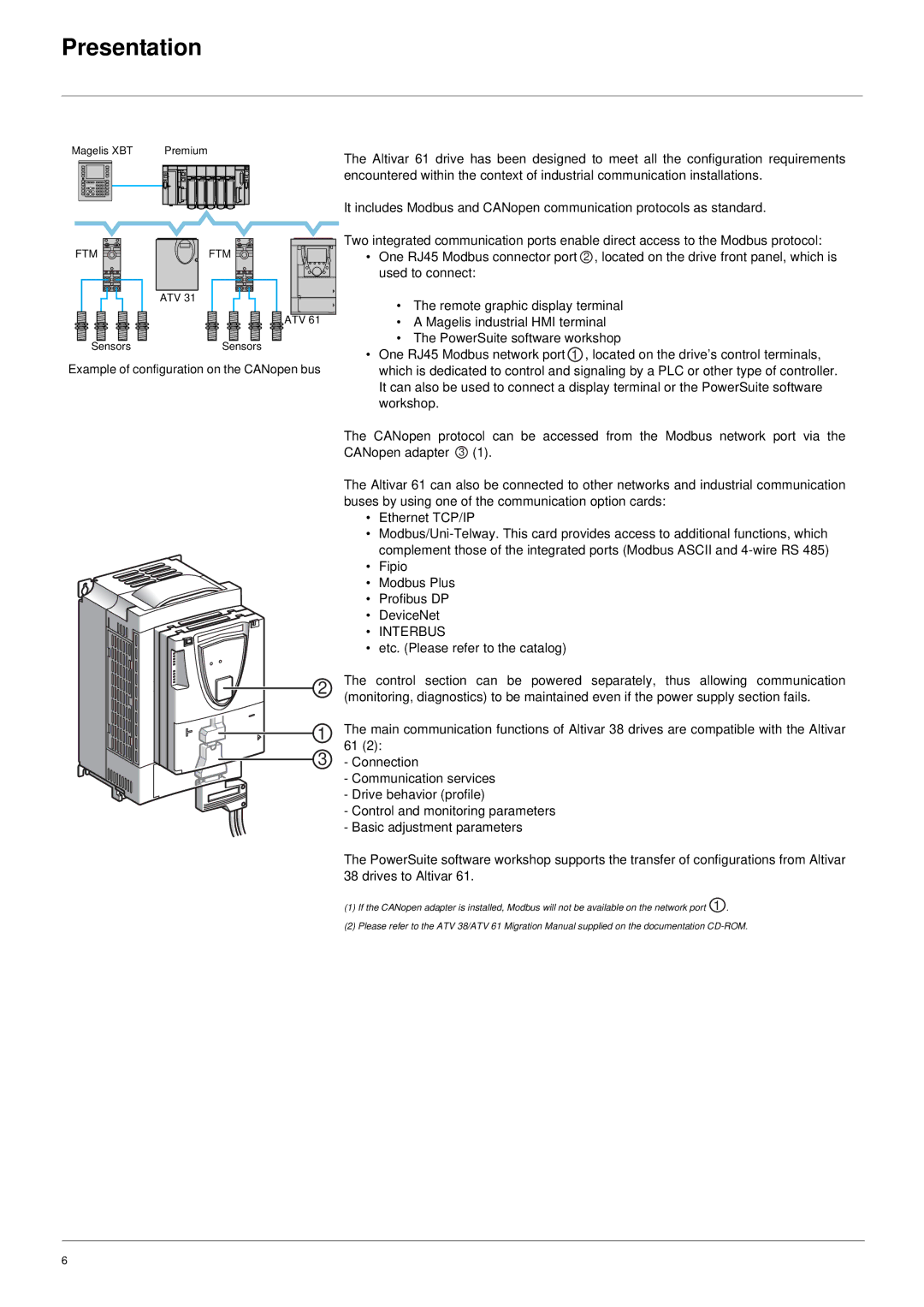
Magelis XBT | Premium | The Altivar 61 drive has been designed to meet all the configuration requirements |
|
| |
|
| encountered within the context of industrial communication installations. |
|
| It includes Modbus and CANopen communication protocols as standard. |
FTM | FTM |
| ATV 31 |
| ATV 61 |
Sensors | Sensors |
Example of configuration on the CANopen bus
Two integrated communication ports enable direct access to the Modbus protocol:
•One RJ45 Modbus connector port 2 , located on the drive front panel, which is used to connect:
•The remote graphic display terminal
•A Magelis industrial HMI terminal
•The PowerSuite software workshop
•One RJ45 Modbus network port 1 , located on the drive’s control terminals, which is dedicated to control and signaling by a PLC or other type of controller. It can also be used to connect a display terminal or the PowerSuite software workshop.
The CANopen protocol can be accessed from the Modbus network port via the
CANopen adapter 3 (1).
The Altivar 61 can also be connected to other networks and industrial communication buses by using one of the communication option cards:
•Ethernet TCP/IP
•
• Fipio
• Modbus Plus
• Profibus DP
• DeviceNet
• INTERBUS
• etc. (Please refer to the catalog)
2 | The control section can be powered separately, thus allowing communication |
| (monitoring, diagnostics) to be maintained even if the power supply section fails. |
1 | The main communication functions of Altivar 38 drives are compatible with the Altivar |
3 | 61 (2): |
- Connection |
- Communication services - Drive behavior (profile)
- Control and monitoring parameters - Basic adjustment parameters
The PowerSuite software workshop supports the transfer of configurations from Altivar 38 drives to Altivar 61.
(1) If the CANopen adapter is installed, Modbus will not be available on the network port 1 .
(2) Please refer to the ATV 38/ATV 61 Migration Manual supplied on the documentation
6