Status parameters
Code |
|
| Description |
| |
|
|
|
|
|
|
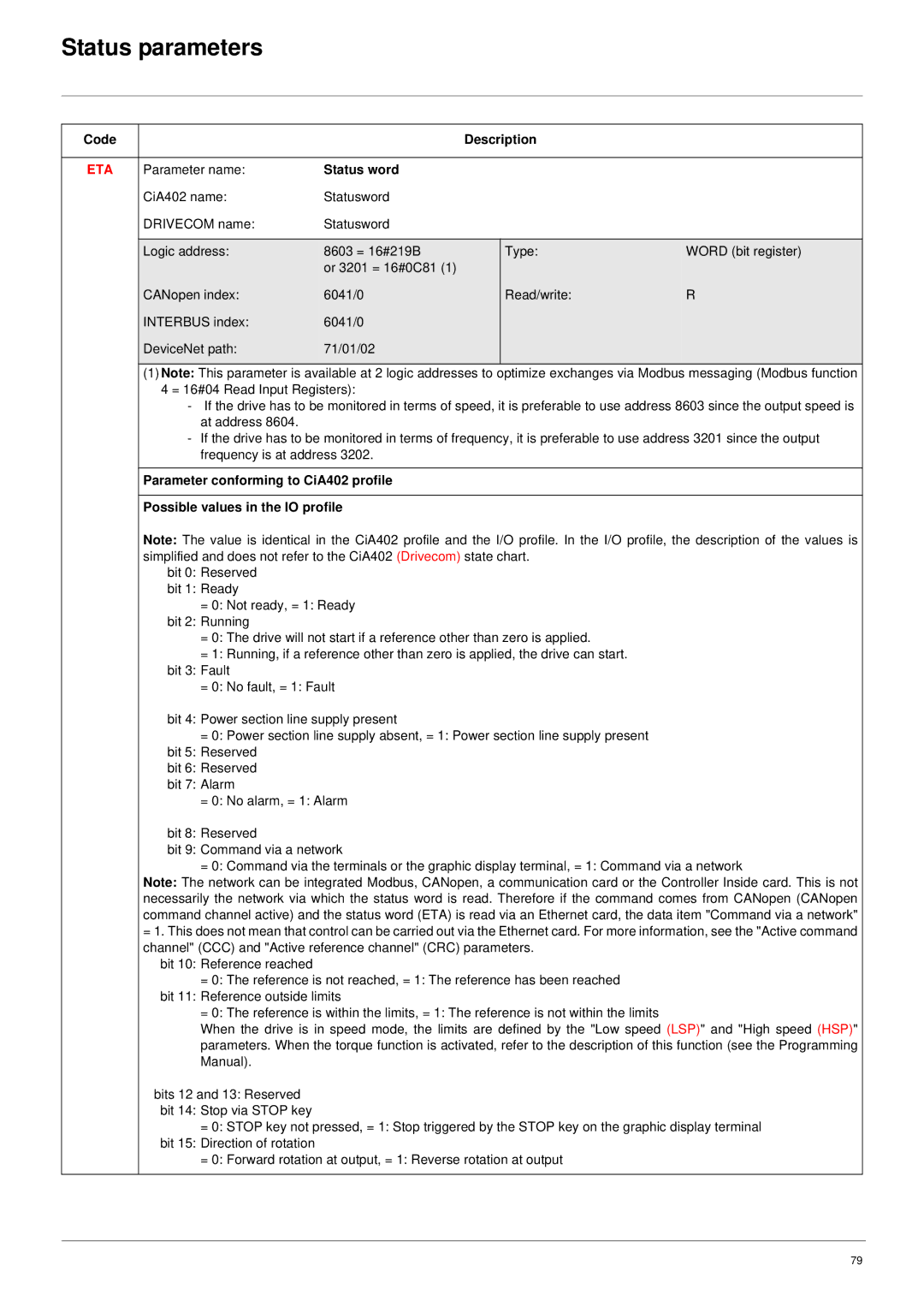
ETA | Parameter name: | Status word |
|
|
|
| CiA402 name: | Statusword |
|
|
|
| DRIVECOM name: | Statusword |
|
|
|
|
|
|
|
|
|
| Logic address: | 8603 = 16#219B |
| Type: | WORD (bit register) |
|
| or 3201 = 16#0C81 (1) |
|
|
|
| CANopen index: | 6041/0 |
| Read/write: | R |
| INTERBUS index: | 6041/0 |
|
|
|
| DeviceNet path: | 71/01/02 |
|
|
|
|
|
|
|
|
|
(1)Note: This parameter is available at 2 logic addresses to optimize exchanges via Modbus messaging (Modbus function
4 = 16#04 Read Input Registers):
-If the drive has to be monitored in terms of speed, it is preferable to use address 8603 since the output speed is at address 8604.
-If the drive has to be monitored in terms of frequency, it is preferable to use address 3201 since the output frequency is at address 3202.
Parameter conforming to CiA402 profile
Possible values in the IO profile
Note: The value is identical in the CiA402 profile and the I/O profile. In the I/O profile, the description of the values is simplified and does not refer to the CiA402 (Drivecom) state chart.
bit 0: Reserved
bit 1: Ready
=0: Not ready, = 1: Ready
bit 2: Running
=0: The drive will not start if a reference other than zero is applied.
=1: Running, if a reference other than zero is applied, the drive can start.
bit 3: Fault
=0: No fault, = 1: Fault
bit 4: Power section line supply present
=0: Power section line supply absent, = 1: Power section line supply present
bit 5: Reserved
bit 6: Reserved
bit 7: Alarm
=0: No alarm, = 1: Alarm
bit 8: Reserved
bit 9: Command via a network
= 0: Command via the terminals or the graphic display terminal, = 1: Command via a network
Note: The network can be integrated Modbus, CANopen, a communication card or the Controller Inside card. This is not necessarily the network via which the status word is read. Therefore if the command comes from CANopen (CANopen command channel active) and the status word (ETA) is read via an Ethernet card, the data item "Command via a network"
=1. This does not mean that control can be carried out via the Ethernet card. For more information, see the "Active command channel" (CCC) and "Active reference channel" (CRC) parameters.
bit 10: Reference reached
=0: The reference is not reached, = 1: The reference has been reached
bit 11: Reference outside limits
=0: The reference is within the limits, = 1: The reference is not within the limits
When the drive is in speed mode, the limits are defined by the "Low speed (LSP)" and "High speed (HSP)" parameters. When the torque function is activated, refer to the description of this function (see the Programming Manual).
bits 12 and 13: Reserved bit 14: Stop via STOP key
=0: STOP key not pressed, = 1: Stop triggered by the STOP key on the graphic display terminal
bit 15: Direction of rotation
=0: Forward rotation at output, = 1: Reverse rotation at output
79