Chapter 4 Parameters




4.2 Parameter Settings for Applications
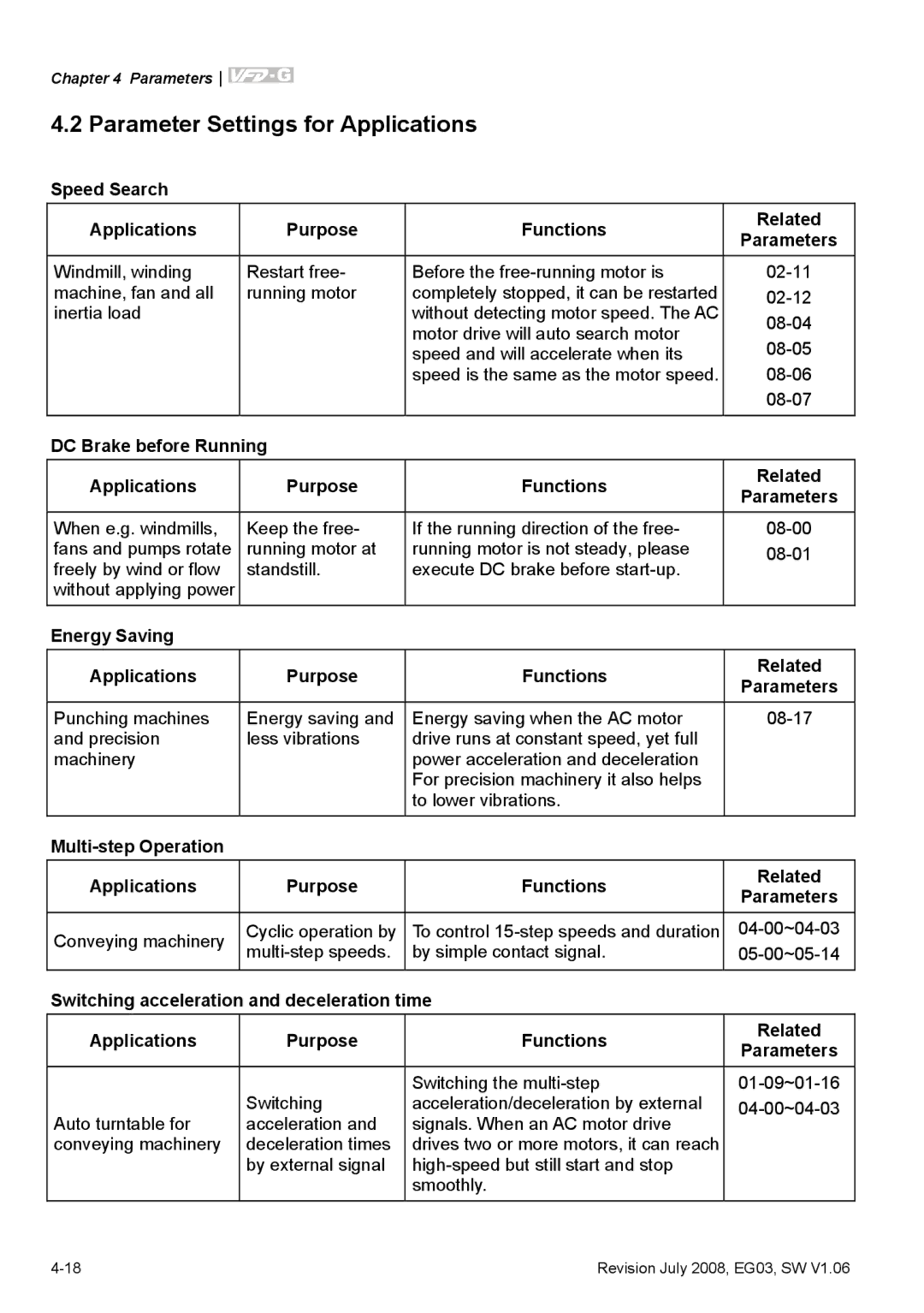
Speed Search
Applications | Purpose | Functions | Related | |
Parameters | ||||
|
|
| ||
Windmill, winding | Restart free- | Before the | ||
machine, fan and all | running motor | completely stopped, it can be restarted | ||
inertia load |
| without detecting motor speed. The AC | ||
|
| motor drive will auto search motor | ||
|
| |||
|
| speed and will accelerate when its | ||
|
| speed is the same as the motor speed. | ||
|
|
| ||
DC Brake before Running |
|
| ||
Applications | Purpose | Functions | Related | |
Parameters | ||||
|
|
| ||
When e.g. windmills, | Keep the free- | If the running direction of the free- | ||
fans and pumps rotate | running motor at | running motor is not steady, please | ||
freely by wind or flow | standstill. | execute DC brake before |
| |
without applying power |
|
|
| |
Energy Saving |
|
|
| |
Applications | Purpose | Functions | Related | |
Parameters | ||||
|
|
| ||
Punching machines | Energy saving and | Energy saving when the AC motor | ||
and precision | less vibrations | drive runs at constant speed, yet full |
| |
machinery |
| power acceleration and deceleration |
| |
|
| For precision machinery it also helps |
| |
|
| to lower vibrations. |
| |
|
|
|
| |
Applications | Purpose | Functions | Related | |
Parameters | ||||
|
|
| ||
Conveying machinery | Cyclic operation by | To control | ||
by simple contact signal. | ||||
| ||||
|
|
|
| |
Switching acceleration and deceleration time |
| |||
Applications | Purpose | Functions | Related | |
Parameters | ||||
|
|
| ||
|
| Switching the | ||
Auto turntable for | Switching | acceleration/deceleration by external | ||
acceleration and | signals. When an AC motor drive |
| ||
conveying machinery | deceleration times | drives two or more motors, it can reach |
| |
| by external signal |
| ||
|
| smoothly. |
| |
Revision July 2008, EG03, SW V1.06 |