J2-Super Series
Safety Instructions
To prevent electric shock, note the following
HC-SFS81
HC-UFS
HC-SFS121
HC-SFS202
Wiring
COM
Usage
RA EM1 24VDC
Maintenance, inspection and parts replacement
Dispose of the product as general industrial waste
Configuration
EMC directive
Low voltage directive
Machine directive
Wiring
Power supply
Grounding
Auxiliary equipment and options
Performing EMC tests
Use UL/C-UL standard-compliant products
Also read the manual of the servo system controller
Contents Functions and Configuration
To 7
To 8
To 9
10- 1 to 10
11.1
11.2
11.3
11.4
Page
Functions and Configuration
Functions and Configuration
Introduction
Function block diagram
Function block diagram of this servo is shown below
Servo amplifier standard specifications
High-resolution encoder
Function list
Absolute position detection
Chapter
Phase 200 to 230VAC
Model code definition Rating plate
Model
100 1000 200 2000 400 350 3500 600 5000 700 7000
Combination with servo motor
Structure Parts identification MR-J2S-100B or less
Battery holder
Ground terminal
MR-J2S-200B MR-J2S-350B
MR-J2S-500B
Name plate Main circuit terminal block TE1
MR-J2S-700B
Brake option and servo motor
For MR-J2S-500B
For MR-J2S-700B
MRZJW3-SETUP121E
For 3-phase 200V to 230VAC or 1-phase 230VAC
CN1A
For 1-phase 100V to 120VAC
Servo configuration software Section
No-fuse breaker Section Regenerative brake option
Magnetic contactor Section Cables
Cables Section Servo configuration software
SETUP121E
No-fuse breaker
Regenerative brake option Section Magnetic contactor
FA-BAL
Options and auxiliary equipment Refer to
Memo
Installation
Installation
Control box
Others
Installation of two or more servo amplifiers
Keep out foreign materials
Cable stress
Signals and Wiring
Signals and Wiring
Connection example of control signal system
MR-J2HBUS M-A MR-HBUS M
I/O signals Connectors and signal arrangements
Signal arrangement
Output signals
Input signal
Power supply
Regenerative alarm
Instantaneous power failure
Overcurrent, overload 1 or overload
OFF
Interfaces 3.4.1 Common line
24VDC MBR
Give a signal with a relay or open collector transistor
Detailed description of the interfaces
Digital input interface DI-1
Digital output interface DO-1
Lamp load
Encoder pulse output DO-2
Output pulse
LAR LBR, LZR
Output voltage 10V Max. output current 1mA Resolution 10bit
Analog output
For 3-phase 200 to 230VAC power supply
RA1 RA2
For 1-phase 100 to 120VAC or 1-phase 230VAC power supply
Not provided for 1-phase 100 to 120VAC
11, L Control circuit power supply Phase 200 to 230VAC
50/60Hz Phase 100 to 120VAC
Terminals
Refer to Sections 12.1.2 and 12.1.3 for details
Timing chart
Power-on sequence Power-on procedure
VDD COM EM1
Connection diagram
HC-KFS053 B to 73 B
HC-MFS053 B to 73 B
HC-UFS13 B to 73 B
HC-SFS121 B to 301 B
Black
3 I/O terminals HC-KFS HC-MFS HC-UFS3000r/min series
White
HC-SFS HC-RFS HC-UFS2000 r/min series
Earth
Setting
COM 24VDC MBR
Coasting Servo motor speed Min 60ms Base circuit
Alarm occurrence
Both main and control circuit power supplies off
Power supply Phase
Approx mm
Instructions for the 3M connector
Connection
Control axis selection
Axis
Memo
Operation and Display
Operation and Display
Before starting operation, check the following
Power on
Parameter setting
Home position return
Servo-on
Stop
Servo amplifier display
Display sequence
Indication list
Operation method
Test operation mode
100000
Motorless operation
Operation procedure
Parameters
Parameters
Instable
Parameter write inhibit
Item list
Details list
Column
FR-RC FR-BU
Point
CCW
Basic
Result of auto tuning
15Hz Response 20Hz 25Hz 30Hz 35Hz 45Hz 55Hz Middle 70Hz
85Hz 105Hz
130Hz 160Hz 200Hz High 240Hz Basic Response 300Hz
Speed loop gain 177 Rad/s
Refer to Section Function Column
40dB 14dB 8dB
4dB
8V/max. current command
Pulse unit parameter No
Servo motor speed 8V/max. speed
Max. speed Droop pulses
For manufacturer setting Must not be changed
For manufacturer setting 0001 Must not be changed
Used to set the output range of the zero speed signal ZSP
Used to set the output range of the error excessive alarm
Pulse setting Function Column
Encoder output pulses 4000
Maximum output frequency is 1.3Mpps after multiplication by
Parameters Set value Output pulse
0000 Refer to
Change the following digits of parameter No.22
Setting description
Analog monitor block diagram
PWM
Replacement of MR-J2- B by MR-J2S- B
Main modifications made to the parameters
Servo response parameter No
Auto tuning parameter No
High 130Hz Response
Error excessive alarm level parameter No
Machine resonance suppression filter 1 parameter No
In-position range parameter No
Analog monitor output parameter No
Optional function 6 parameter No
Encoder output pulse parameter No
Memo
General Gain Adjustment
General Gain Adjustment
Gain adjustment mode explanation
Adjustment sequence and mode usage
Start
OK?
END
Adjustment using servo configuration software
You can automatically set the optimum gains
Time
Gain search Executing gain search under to-and-fro
Auto tuning Auto tuning mode
Conditions are not satisfied
Ratio of load inertia moment to servo motor inertia moment
Position control gain
Auto tuning mode operation
Block diagram of real-time auto tuning is shown below
PG1,VG1
PG2,VG2,VIC
Adjustment procedure by auto tuning
Basic procedure
Response level setting in auto tuning mode
15Hz 20Hz 25Hz 30Hz
35Hz 45Hz
55Hz Middle 70Hz
Manual mode 1 simple manual adjustment
Operation of manual mode
Adjustment by manual mode
Adjustment procedure
Suppression of machine resonance
For position control
Refer to .2
General Gain Adjustment
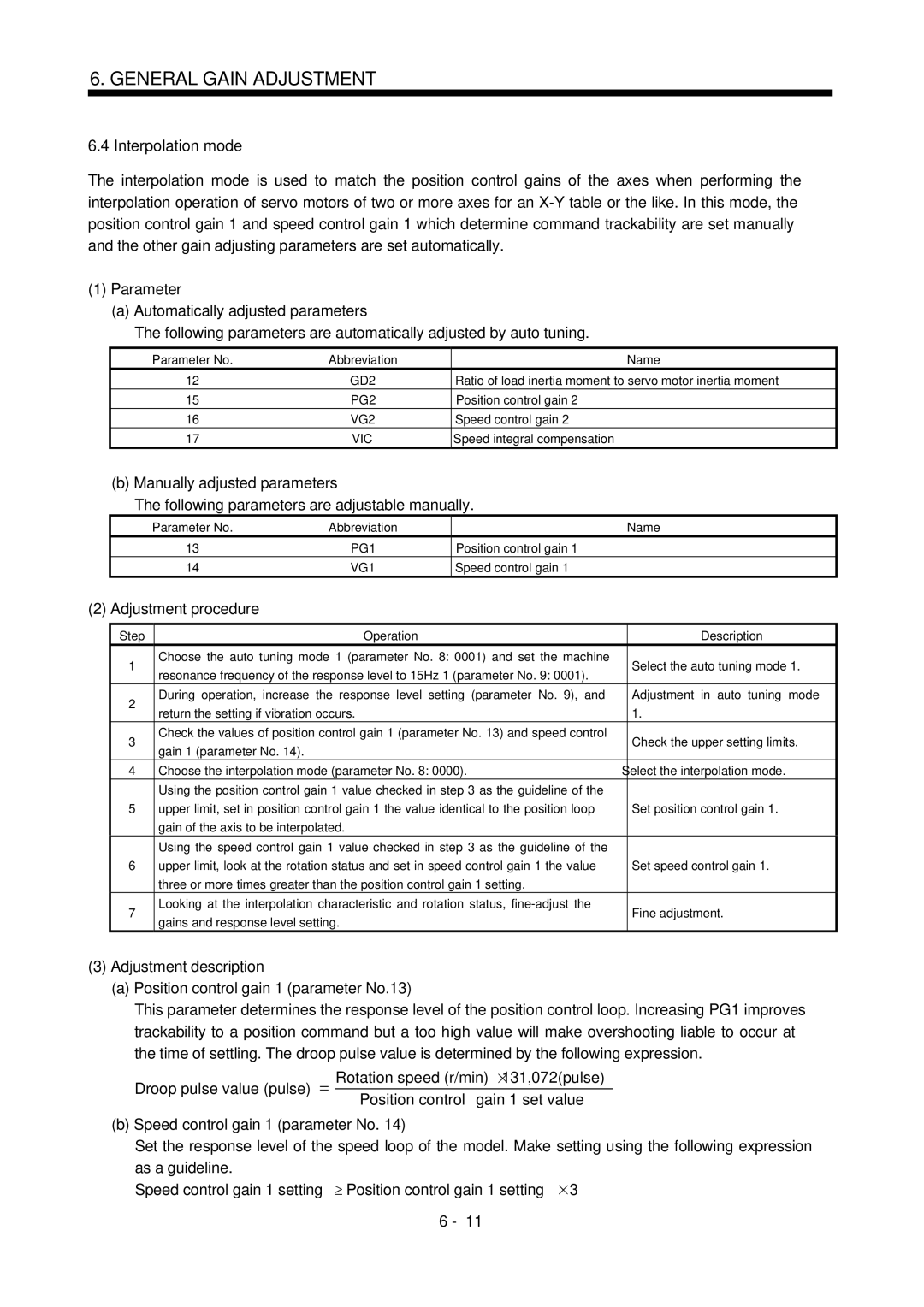
Interpolation mode
Adjustment procedure
Adjustment description
Parameter
15Hz
Auto tuning selection
100Hz 105Hz 130Hz 160Hz 200Hz 240Hz 300Hz
Special Adjustment Functions
Special Adjustment Functions
Machine resonance suppression filter Function
Parameter No Notch frequency selection
Deep 40dB 14dB 8dB Shallow 4dB
Adaptive vibration suppression control Function
Low-pass filter Function
Set the operation of the low-pass filter parameter No.25
Inspection
Inspection
Inspection
Life
Memo
Troubleshooting
Troubleshooting
Alarms and warning list
Alarms
B183V or
B160V or Control power failure of 60ms or Less Longer
Change the servo amplifier
Alarm 17 or 19 occurs if power
Error Occurred at Output wires are in contact at
Super capacitor of the absolute
Reduce the frequency of positioning
Alarm 32 occurs if power is Switched on after U,V and W
Constant
Reexamine acceleration
Deceleration time constant
Parameter error Parameter setting is
Overload
Remedies for warnings
Memo
Outline Dimension Drawings
Outline Dimension Drawings
TE1 TE2
TE1
MR-J2S-70B MR-J2S-100B
MR-J2S-200B MR-J2S-350B
MR-J2S-500B
Mounting hole 1807.09 2007.87 1606.23 1385.43 60.24
Connectors Servo amplifier side 3M
Insulation displacement type
Soldered type
Threaded type
Bus cable connector Honda Tsushin Industry
PCR-LS20LA1
PCR-LS20LA1W
DE-C1-J6-S6 34.51.36 190.75 24.990.98 331.30 60.24
Memo
Characteristics
Characteristics
Overload protection characteristics
Electronic thermal relay protection characteristics
MR-J2S-500B MR-J2S-700B
MR-J2S-10B1
MR-J2S-20B1
MR-J2S-40B1
MR-J2S-60B
Temperature distribution in enclosure
Heat dissipation area for enclosed servo amplifier
Dynamic brake characteristics
There is internal relay delay time of about 30ms
Mmin
Mm/minin/min
HC-KFS series
HC-SFS1000r/min series
HC-SFS3000r/min series
HC-MFS series
MR-JCCBL M-H MR-JHSCBL M-H MR-ENCBL M-H
Encoder cable flexing life
MR-JCCBL M-L MR-JHSCBL M-L
Memo
Options and Auxiliary Equipment
Options and Auxiliary Equipment
Selection of the regenerative brake option
JM No 1047
104
No T2 t1
No regeneration
Set parameter No.2 according to the option to be used
FR-RC FR-RB
Connection of the regenerative brake option
For the MR-RB51 install the cooling fan as shown
Mounting method
Outline drawing
MR-RB032 MR-RB12
MR-RB32
MR-RB50
Brake unit
Selection
FR-BU-15K
16.5 MR-J2S-500B FR-BU-30K
Brake unit FR-BU
Outside dimensions
Unit mmin
Power return converter Selection
Resistor unit FR-BR
NFB MC FR-BAL VDD COM ALM
RDY
FR-RC
RA2 EM1 OFF
Outside dimensions of the power return converters Unit mmin
Mounting hole machining dimensions
Cables and connectors Cable make-up
CN1A CN1B
CN2 CN3
HC-KFS HC-MFS
Long flexing
Encoder cable Refer to 2 in this Life Section IP20
IP67
Not oil
Connector Maintenance
Manual Power supply
Manual IP65 IP67 Power supply
Manual Brake connector
Standard flexing life Long flexing life
Servo amplifier side Encoder side
MR-JHSCBL M-L
MR-JHSCBL10M-H
Connection diagram
Communication cable
Model MR-CPCATCBL3M
MR-CPCATCBL3M
Bus cable
Cause misoperation or explosion
ModelMR-J2HBUS M-A
ModelMR-J2HBUS M
MR-J2HBUS CN3B CN3A CN3C
Maintenance junction card MR-J2CN3TM Usage
CN3A CN3B CN3C MO1 MO2 VDD COM EM1 MBR Emgo
Battery MR-BAT, A6BAT
Servo configurations software
Specifications
System configuration
Configuration diagram
Recommended wires Wires for power supply wiring
Recommended wires
Auxiliary equipment
5mm2 for use of the HC-RFS203 servo motor
Wires for option cables
Wires for cables
Recommended crimping terminals
Power factor improving reactors
No-fuse breakers, fuses, magnetic contactors
Relays
Following relays should be used with the interfaces
Surge absorbers
Noise reduction techniques
Options and Auxiliary Equipment
Noise reduction products
10 to 100MHZ 100 to 500MHZ 150
Ex A.2003
Outline drawing
On the output side, the number of turns must be four or less
Leakage current breaker Selection method
Selection example
EMC filter
Combination with the servo amplifier
SF1252
MR-J2S-200B MR-J2S-350B SF1253
HF3040-TM HF-3050A-TM
Position setting again. Not doing so can cause runaway
Features
Absolute Position Detection System
Absolute Position Detection System
Specifications Specification list
CN1 CN2
CON1
Confirmation of absolute position detection data
Revisions
Manual number is given on the bottom left of the back cover
Sep SHNA030007-A
SHNA030007-B