30 HP 230/460V
Safety Instructions
Operating Precautions
Page
Page
Page
Contents
Troubleshooting & Maintenance
Options
230V Class 1 ~ 30HP
460V Class 1 ~ 30HP
Common Features Specification
460V Class 40 ~ 100HP
Iii
Page
Mounting
Inspection
Environmental Conditions
075 10 HP 550 75 HP
Other Precautions
Installation
Dimensions
Frame
Blank
Frame # 3 15 ~ 20 HP Frame # 4 25 ~ 30 HP
Blank
DC Bus Choke
Basic Wiring
230/460 50/60 Hz
DB Resistor
Power Terminals
Symbols Functions
P N B1 B2 U Phase Power Input
Installation Type a Configuration
Type B Configuration
N B1 B2
Installation Type C Configuration
Dynamic Braking Unit Dynamic Braking Resistor DC Bus Choke
Shorting terminals may cause internal damage to inverter
Installation Wiring Power Terminals Wiring Precautions
Grounding
Power and Motor Connection B1 B2 U Phase Power Input
Installation Wires and Terminal Lugs
Motor should be connected to the U, V, and W terminals
30A 30C 30B AXA AXC
Type Symbol Name Description
Control Terminals
JOG RST
Control Circuit Terminal
Installation Wiring Control Terminals Wiring Precautions
External Sequence Inverter Circuitry
Installation Keypad Connection
Keypad Connector
Installation
Parameter Groups
Parameter LCD Keypad Segment Keypad Description Group
LCD Keypad
Operation
00 Hz
Operation LCD Keypad Display
Displays Description
Operation Procedure for Setting Data LCD Keypad
Operation Parameter Navigation LCD Keypad
Drive Group FU1 Group FU2 Group
Segment display Encoder knob
7-Segment Keypad
Parameter Group Description
First digit
Operation 1 7-Segment Keypad Display
Display Description
Second digit
FUN2 Group
FUN1 Group
I/O Group
Operation Parameter Navigation 7-Segment Keypad
FU1 Group FU2 Group
Keypad and Control
Operation Method Function Function Setting
Operation Method
Terminals
Operation
Page
QUICK-START Procedures
LCD Display Segment Display
Operation using Keypad
Quick-Start Procedures
LCD Press Prog key Seg PressPROG/ENT key
LCD Display
Operation using Control Terminals
2 W
Frequency set by External Source and Run/Stop by Keypad
Operation using Keypad and Control Terminals
00 STP 00Hz DRV Drive mode 03 Fx/Rx-1 Keypad DRV Freq mode
LCD Press ENT key Seg Press PROG/ENT key
LCD Press ENT key to save the data
00 STP 00Hz
DRV Cmd. freq 00 0.00Hz 00 60.00Hz
SegPress PROG/ENT key to save the data
Page
Common parameter setting
Function Setting
Basic function parameter setting
Parameter Name Code Description
Auto-tuning of motor constant
Function Settings F + PG control
Slip compensation
For VectorSPD, VectorT
Function Settings FU2-40 Description
For V/F, Slip compen , SensorlessS, SensorlessT
Sensorless vector control
Advanced function 1 setting
Function Settings
F control Parameter Name Code Description
Vector control VectorSPD, VectorTRQ
Function Settings Sensorless vector control
Status Code Description
Parameters to view motor and inverter status
Protection & fault detection level setting
Starting / Accel/ Decel / Stopping pattern setting
Jog and Multi-speed operation
Advanced function 2 setting 1 PID operation
Speed Signal Applied speed value
Speed-H Speed-M Speed-L
Function Settings Auto sequence operation
Energy-saving operation
Operation Examples
Wiring
Operation condition
Set it to 0 KeyPad
Operation Example 2nd motor operation
DRV-5
RST AXA
Operation VectorSPD Control Example
Operation Examples
Drive Group DRV
Parameter List
LCD keypad
Function 1 Group FU1
Rev boost
Limit Hi
Fwd boost
Pattern
FU1-99 Return Code Not available
Code Description Keypad Display Setting Range Units Factory
Function 2 Group FU2
SS blk time
Retry Delay
Auto tuning
Pole number
PID Ref
SL P-gain
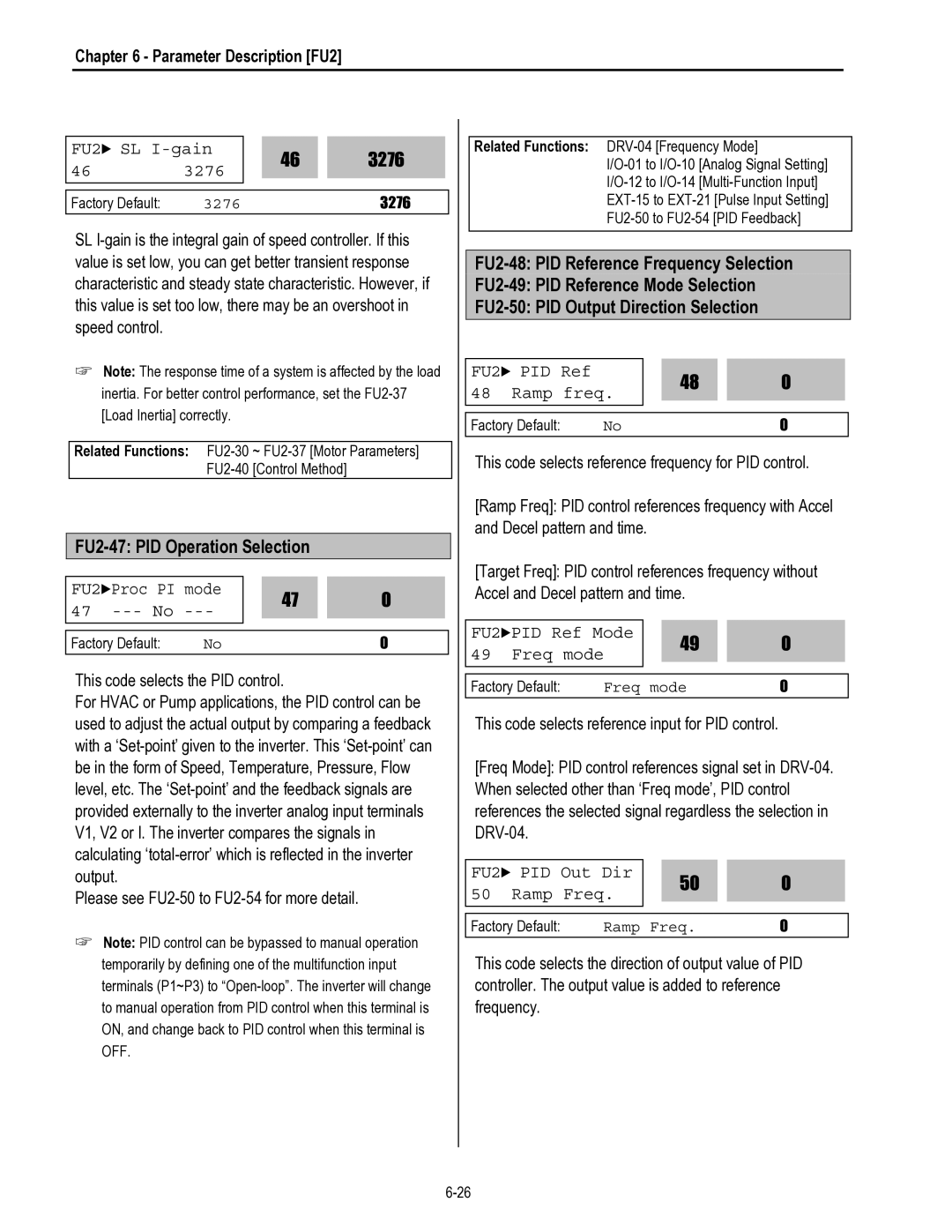
SL I-gain
PID Out Dir
Version
DB mode
RPM factor
Para. Read
Input/Output Group I/O
Status
P2 define
P3 define
Out status
Segment
Inv No
Relay mode
Auto mode
Baud rate
External Group EXT
P6 define
V2 mode
P5 define
V2 filter
Pulse num
FeedBack
Pulse set
Pulse
AM1 mode
LM mode
LM adjust
AM1 adjust
Default
Communication Group COM
App Mode
Application Group APP
Trv Off Hi
Trv. Amp
Trv. Scr
Trv Off Lo
AutoCh-Mode
AutoEx-intv
Sub-Board Selection Guide According To Function
Parameter List
Page
Setting the DRV-04 Frequency or Torque Mode
Digital frequency setting
Monitoring function setting
Cmd. Freq 00 Hz
Parameter Description DRV
DRV-01 Acceleration Time
10.0
Acc. time
DRV-02 Deceleration Time
DRV-03 Drive Mode Run/Stop Method
20.0
Setting Range Description
Freq mode
Keypad-1
DRV-05 ~ DRV-07 Step Frequency 1 ~
10.00
DRV-09 Motor Speed
DRV-12 Fault Display
DRV-08 Output Current
DRV-10 DC Link Voltage
130
DRV-14 Command/Output Frequency Display LCD Keypad
DRV-13 Motor Direction Set 7-Segment Keypad
DRV-15 Reference/Feedback Frequency Display LCD Keypad
Parameter Description DRV
FU1-03 Run Prevention
FU1-00 Jump to Desired Code #
FU1-05 Acceleration Pattern FU1-06 Deceleration Pattern
Parameter description FU1
FU1-07 Stop Mode
FU1 Stop mode Decel
Decel
FU1 DcBr value 50 %
FU1 DcBr freq 00 Hz
FU1 DcBlk time 10 sec
FU1
FU1 DcSt time Sec
FU1-14 Pre-excitation Time
FU1 DcSt value 50 %
FU1 PreExTime Sec
FU1-16 Pre-excitation Current
FU1-15 Hold Time
1000
00.0
FU1 F-limit Hi
FU1 Freq limit
FU1 F-limit Lo
60.00 Hz
FU1-29 Volts/Hz Pattern
FU1 V/F pattern Linear
FU1-30 ~ FU1-37 User V/F Frequency and Voltage
15.00
FU1-39 Energy Save Level
FU1-38 Output Voltage Adjustment
100
150
FU1 OL level
FU1-54 Overload Warning Level FU1-55 Overload Warning Time
FU1 ETH
FU1 Motor type Self-cool
180
000
990
FU1-99 Return Code 7-Segment Keypad
St bit
Page
Parameter description FU1
FU2-03 Previous Fault History
FU2-01 Previous Fault History
FU2-02 Previous Fault History
FU2-04 Previous Fault History
FU2-07 Dwell Frequency FU2-08 Dwell Time
FU2-10 ~ FU2-16 Frequency Jump
FU2-20 Power on Start Selection
FU2-19 Input/Output Phase Loss Protection Bit Set
FU2-19 Phase Loss Protection Select
RST restart
FU2-21 Restart After Fault Reset
0000
FU2Speed Search
FU2-22 Speed Search Select
FU2Motor select 75kW
FU2-28 Speed search hold time
FU2 SS blk time Sec
75 kW
FU2-38 Carrier Frequency
FU2Control mode
FU2-39 Control mode selection
Control
Detail Tuning Method for Sensorless Vector Control
171
FU2-40 ~ 44 Auto tuning
29.03
FU2 SL P-gain
3276
32767
FU2-47 PID Operation Selection
30.0
300.0
100.0
Parameter Description FU2
Process PID Control
FU2-70 Reference Frequency for Accel/Decel
FU2-72 Power On Display
FU2-69 Accel/Decel Change Frequency
FU2-71 Accel/Decel Time Scale
FU2-74 Gain for Motor Speed Display
FU2-75 DB Dynamic Braking Resistor Mode Selection
FU2-73 User display selection
FU2-76 Duty of DB Dynamic Braking Resistor
FU2-91 Parameter Read FU2-92 Parameter Write
FU2-79 Software Version
FU2-81 ~ FU2-90 2nd Motor Related Functions
Parameter Upload Parameter Download
FU2-99 Return Code 7-Segment Keypad
FU2-93 Parameter Initialize
FU2-94 Parameter Write Protection
Para. init
Parameter Description FU2
Input/Output Group I/O I/O-00 Jump to Desired Code #
01 ~ I/O-05 Analog Voltage Input V1 Signal Adjustment
06 ~ I/O-10 Analog Current Input I Signal Adjustment
Parameter description I/O
11 Criteria for Analog Input Signal Loss
20.00
14 Multi-function Input Terminal ‘P3’ Define
12 Multi-function Input Terminal ‘P1’ Define
13 Multi-function Input Terminal ‘P2’ Define
Speed-L, Speed-M, Speed-H
Code
XCEL-L, XCEL-M, XCEL-H
Parameter Speed-H Speed-M Speed-L
Accel/Decel Parameter XCEL-H XCEL-M
Exchange
Parameter Description I/O Dc-brake
Up, Down
Main-drive
Parameter Description I/O Wire ITerm Clear
Open-loop
Analog hold
SEQ-L, SEQ-M, SEQ-H
Xcel stop Hold step
Gain2
Manual
15 Terminal Input Status
LCD Keypad Display
Segment Keypad Display
16 Terminal Output Status
40.00
40 FM Frequency Meter Output 41 FM Adjustment
21 ~ I/O-24 Step Frequency 4, 5, 6
30.00
44 Multi-function Auxiliary Contact Output
42 FDT Frequency Detection Level
43 FDT Bandwidth
Define AXA-AXC
FDT-3
FDT-1
FDT-2
FDT-4
IOL
FDT-5
Stall
INV line, Comm line
Lost Command
Parameter Description I/O Stop
Ssearch
010
45 Fault Output Relay 30A, 30B, 30C
MMC
46 Inverter Number 47 Baud Rate
9600
Parameter Description I/O Auto-A
Auto B
Parameter Description I/O
Parameter Description I/O
EXT-01 Sub-Board Display
EXT-00 Jump to Desired Code #
Parameter Description EXT
Signal Adjustment Sub-A, Sub-C
EXT-05 V2 Mode Selection Sub-A, Sub-C
EXT-06 ~ EXT-10 Analog Voltage Input
EXT-13 Real Motor Speed Direction
EXT-12 Usage of Pulse Input Signal Sub-B
EXT-15 Pulse Input Signal Selection Sub-B
EXT-14 Encoder Feedback Frequency
EXT-16 Encoder Pulse Number Sub-B
EXT-17 Filtering Time Constant for Pulse Input Signal Sub-B
EXT-18 ~ EXT-21 Pulse Input Signal Adjustment Sub-B
EXT-22 ~ EXT-23 Gains for ‘Sub-B’ Board
EXT-34 LM Load Meter Output Sub-A EXT-35 LM Adjustment
EXT-24 Slip Frequency for ‘Sub-B’ Board
AM2 mode DC link Vtg
AM1 mode Frequency
AM1 Adjust
AM2 Adjust
EXT-50~53 Speed limit for Torque mode operation
Torque change
Torque Dir
Speed limit
Direction
Parameter
EXT-56 Torque Detection Level
EXT-57 Torque Detection Bandwidth
Display Name
Parameter Description APP
APP-01 Application Mode Selection
Application Group APP APP-00 Jump to desired code #
APP Jump code 001
APP-04 Traverse Accel Time APP-05 Traverse Decel Time
APP-02 Traverse Amplitude
APP-03 Traverse Scramble Amplitude
ACti
APP-08 Running Auxiliary Motor Number Display
APP-06 Traverse Offset Hi Setting
APP-07 Traverse Offset Lo Setting
APP-09 Starting Auxiliary Motor Selection
60.0
49.99
APP-21 The Number of Aux. Motors
APP-25 Wake-Up Level
19.00
7200
APP-26 Auto Change Mode Selection
APP-27 Auto Change Time APP-28 Auto Change Level
ACtion
APP-29 Inter-Lock Selection
APP-32 Draw Mode Selection
APP-33 Draw Size Setting
APP-30 Actual Value Display
Draw & Override
Page
Option
Name Description
Options
Option Name Description
SUB-A
Board configuration
Sub-A board
Terminal Description
Options Terminal Configuration
VR V2 5G NC Q1 Q2 Q3 Extg NC P4 P5 P6 LM CM
Parameters of Sub-A Board
Sub-B Board
BOC
AOC BOC A+ A- B+ B- FBA FBB GND GND +5V +5V VCC VCC
Options Terminal Configuration total 14 pins
Parameters of Sub-B Board
Sub-B board with Line Drive type encoder
Sub-B board with Open collector type encoder
Sub-C Board Isolated
+ F
Q1 Extg NC P4 P5 P6 CM NC GND V2 AM1 AM2 VR GND
Parameters of Sub-C Board
Sub-D Board
AOC BOC
Input/Output function
Options Parameters of Sub-D board
Encoder Pulse function
Code Description LCD display
GND
Q1 Q2 Extg NC P4 P5 P6 CM NC V2 VR 5G NC NC
AOC BOC
Device-Net Field bus
Options 3 RS485 Communication
Remote cable
Options Mounting the option boards
External options
Optional Keypads
Options DB Resistors
130 600
DB Resistor
B1 B2
RST JOG
Max distance 5m Short Wire should be Twisted
DB ResistorDB Unit
ER-2
BR1000W085J 220 345 140 330
Type 1 Max Watt Type 2 Max Watt
Type
Options DB Dynamic Brake Unit
Inverter Applicable motor rating DB Unit Dimension
CM OH
Dimension
Power LED turns Red when input power is applied to DBU
Rectifying the motor insulation
Suppressing the surge voltage on the inverter output side
Page
Keypad Display Protective Description
Fault Display
Segment Function
Troubleshooting & Maintenance
OPT
Fault Remedy
Protective Cause Remedy
Correctly
Troubleshooting
Condition Check Point
How to Check Power Components
Elements Test Polarity Measured Value
Routine Inspection
Maintenance
Precautions
Periodical Inspection
Parts Replacements
Megger test
Daily and Periodic Inspection Items
Inspection Method Criterion Measuring Instrument
Page
Appendix a Functions Based on USE
Use Related Parameter Code
FU1 Group
Application Parameter Code DRV Group
FU2 Group
Application Parameter Code
Appendix C Peripheral Devices
SMC-50P
Page
EN 50081-2
CD 73/23/EEC and CD 89/336/EEC
EN50178
EN 55011
ENV 50140
EN 50178
ENV 50204
EMC Installation Guide
Essential Requirements for CE Compliance
Viii
RFI Filters Footprint Standard for ACtionMaster Series
Footprint Filters
Dimensions
Revisions
Cleveland Motion Controls