ST Terminal Delay |
|
|
| Torque Boost #2 | ||||
|
|
|
| |||||
ST Terminal Delay |
|
|
| |||||
Program | ⇒ | Terminal Settings Terminal Delays Input Terminal | Parameter Type — Numerical | |||||
Delays |
|
|
| ⇒⇒ |
| |||
| ST Terminal Delay |
| Factory Default — 8.0 | |||||
This parameter delays the response of the ASD to any change in the ST | Changeable During Run — No | |||||||
terminal input by the programmed value (see waveforms at FL Off Delay). |
| |||||||
The delay may be increased to provide additional electrical noise immunity or | Minimum — 2.0 | |||||||
to prevent the ASD from responding to contact bounce or chatter. | Maximum — 200.0 | |||||||
|
|
|
|
|
|
| Units — mS | |
|
|
|
| |||||
Program | ⇒ | Special Control |
|
| Parameter Type — Selection List | |||
|
|
| ⇒ | Factory Default — Disabled | ||||
The ability to switch between the Manual and Auto modes while running. |
| |||||||
Settings: |
|
|
|
|
|
| Changeable During Run — No | |
Disabled |
|
|
|
|
| |||
Enabled |
|
|
|
|
| |||
Maintain Motion |
|
|
| |||||
Seamless |
|
|
|
|
| |||
Torque Boost #1 |
|
|
| |||||
Program⇒ |
| Motor Settings |
| Torque Boost #1 | Parameter Type — Numerical | |||
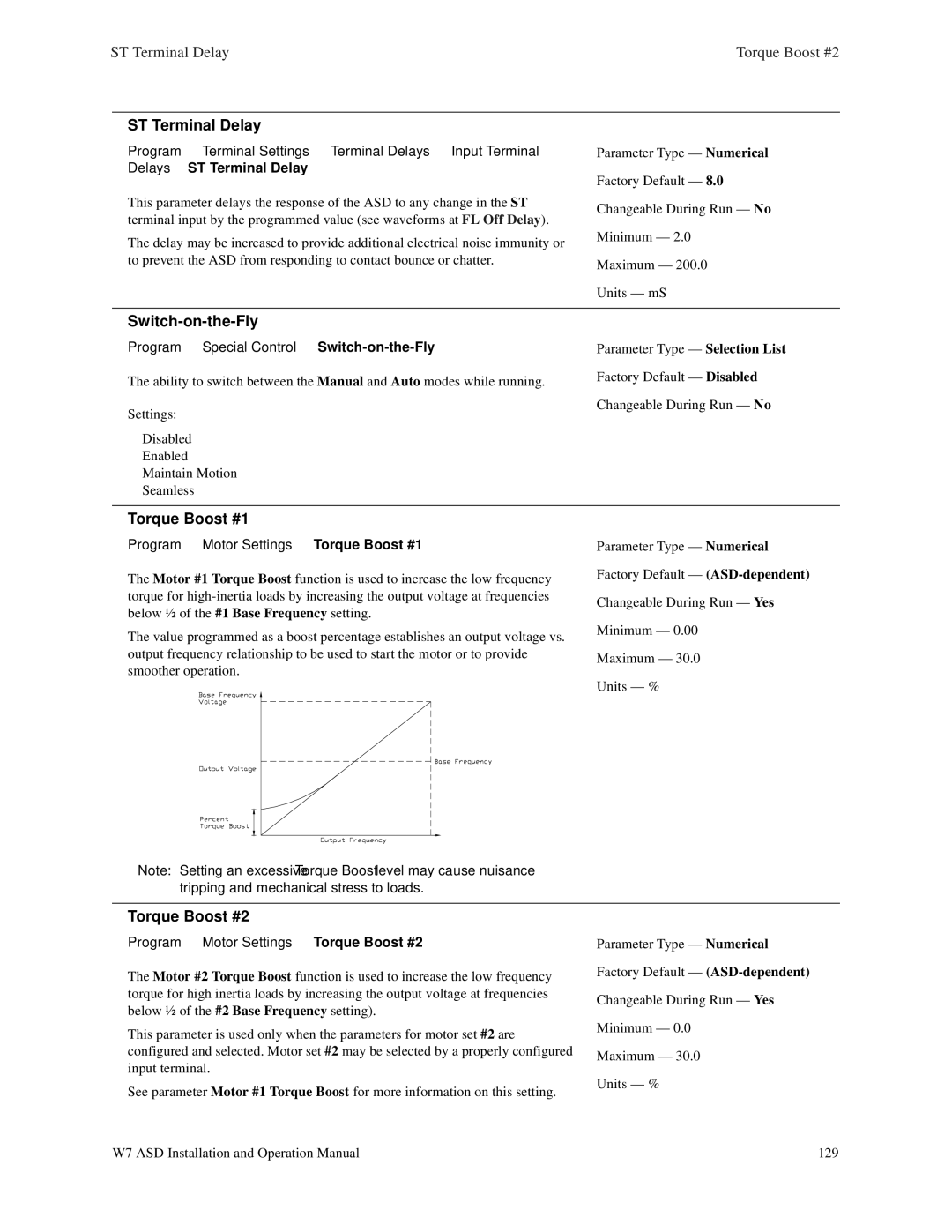
The Motor #1 Torque Boost function is used to increase the low frequency | Factory Default — | |||||||
| ||||||||
torque for | Changeable During Run — Yes | |||||||
below ½ of the #1 Base Frequency setting. | ||||||||
| ||||||||
The value programmed as a boost percentage establishes an output voltage vs. | Minimum — 0.00 | |||||||
| ||||||||
output frequency relationship to be used to start the motor or to provide | Maximum — 30.0 | |||||||
smoother operation. |
|
| ||||||
|
|
| ||||||
|
|
|
|
|
|
| Units — % | |
Note: Setting an excessive Torque Boost level may cause nuisance |
| |||||||
tripping and mechanical stress to loads. |
| |||||||
⇒ |
| ⇒ |
|
| ||||
Torque Boost | #2 |
|
|
| ||||
Program |
|
| Motor Settings |
| Torque Boost #2 | Parameter Type — Numerical | ||
The Motor #2 Torque Boost function is used to increase the low frequency | Factory Default — | |||||||
| ||||||||
torque for high inertia loads by increasing the output voltage at frequencies | Changeable During Run — Yes | |||||||
below ½ of the #2 Base Frequency setting). | ||||||||
| ||||||||
This parameter is used only when the parameters for motor set #2 are | Minimum — 0.0 | |||||||
| ||||||||
configured and selected. Motor set #2 may be selected by a properly configured | Maximum — 30.0 | |||||||
input terminal. |
|
|
| |||||
|
|
|
| |||||
See parameter Motor #1 Torque Boost for more information on this setting. | Units — % | |||||||
| ||||||||
W7 ASD Installation⇒ | and Operation⇒Manual | 129 | ||||||