BIN Torque Reference Reference #1 | BIN Torque Reference Reference #2 |
BIN Torque Reference Reference #1
Program Frequency Settings Speed Reference Setpoints BIN
BIN Torque Reference Setpoint #1
This parameter is used to set the direction, gain, and bias of the discrete input terminals when using the discrete input terminals as the control input while operating in the Torque Control mode.
BIN Input Torque Control Setup
Perform the following setup to allow the system to receive Torque control input from the discrete input terminals:
• | Program | Utilities Command Mode Terminal Block. |
• | Program | Utilities ⇒Frequency Mode ⇒Use Binary/BCD Input. |
• | Program ⇒Terminal Settings Input Terminals; select and set the | |
| desired discrete input terminals to Bin Bit(s) 0 – 7 or 0 – MSB (see Table 6 | |
| on page 138 for a listing of the available terminal settings). The binary | |
| terminal input word will control the direction, speed, and torque of the | |
| motor. |
|
• Provide a Run command (F or R). | ||
Torque Control | ||
When operating⇒ | in the Torque Control⇒mode, scaling of the discrete input⇒⇒ | |
terminals is accomplished via the following⇒parameters as described below:
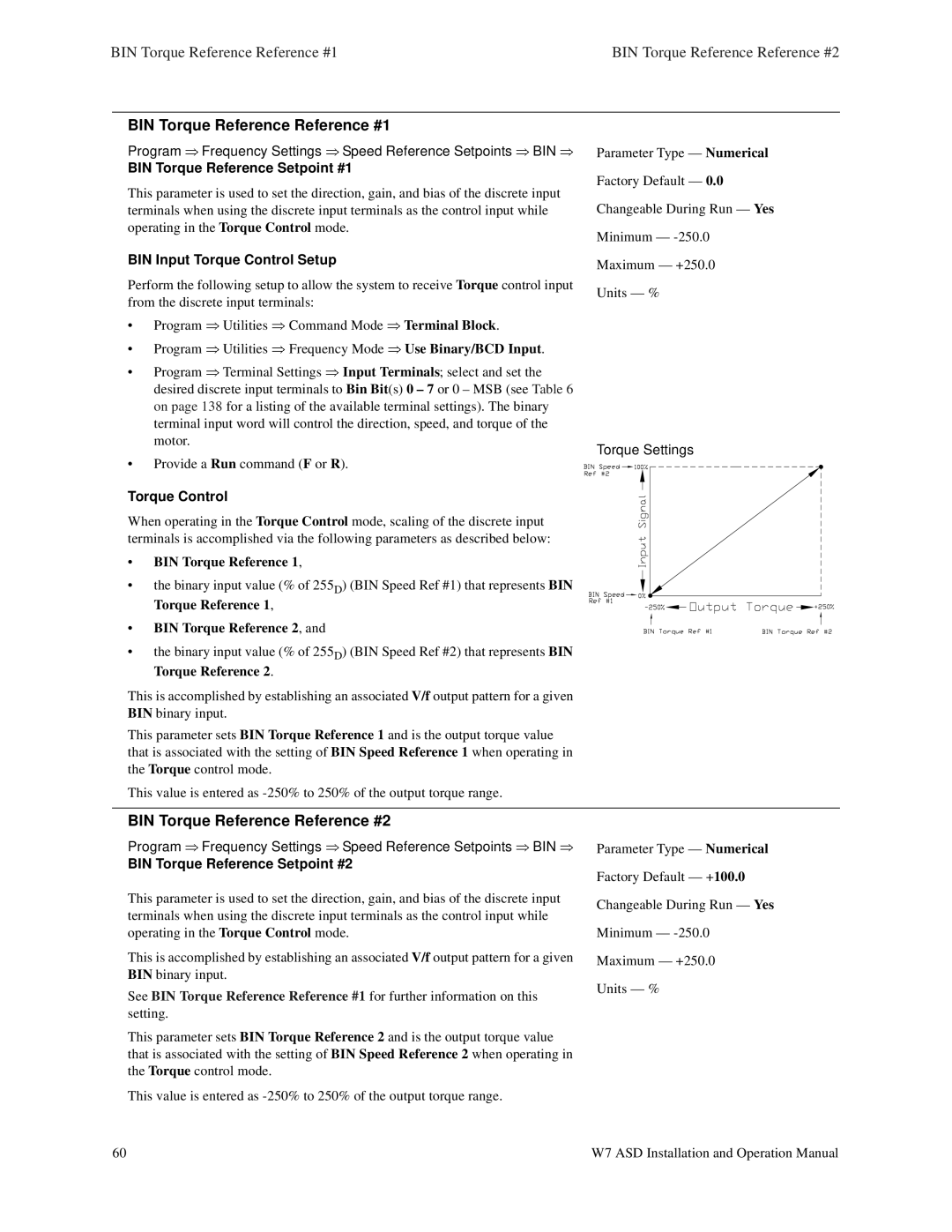
• BIN Torque Reference 1,
• the binary input value (% of 255D) (BIN Speed Ref #1) that represents BIN Torque Reference 1,
• BIN Torque Reference 2, and
• the binary input value (% of 255D) (BIN Speed Ref #2) that represents BIN Torque Reference 2.
This is accomplished by establishing an associated V/f output pattern for a given BIN binary input.
This parameter sets BIN Torque Reference 1 and is the output torque value that is associated with the setting of BIN Speed Reference 1 when operating in the Torque control mode.
This value is entered as
Parameter Type — Numerical
Factory Default — 0.0
Changeable During Run — Yes
Minimum —
Maximum — +250.0
Units — %
Torque Settings
BIN Torque Reference Reference #2
Program Frequency Settings Speed Reference Setpoints BIN
BIN Torque Reference Setpoint #2
This parameter⇒is used to set the direction,⇒gain, and bias of the discrete⇒⇒input terminals when using the discrete input terminals as the control input while operating in the Torque Control mode.
This is accomplished by establishing an associated V/f output pattern for a given BIN binary input.
See BIN Torque Reference Reference #1 for further information on this setting.
This parameter sets BIN Torque Reference 2 and is the output torque value that is associated with the setting of BIN Speed Reference 2 when operating in the Torque control mode.
This value is entered as
60
Parameter Type — Numerical
Factory Default — +100.0
Changeable During Run — Yes
Minimum —
Maximum — +250.0
Units — %
W7 ASD Installation and Operation Manual