MCF51QE64 MCF51QE32
Page
MCF51QE128 Series Features
Page
MCF51QE128 Reference Manual
MCF51QE128 MCU Series Reference Manual, Rev
Contents
Section Number Title
Freescale Semiconductor
Chapter Resets, Interrupts, and General System Control
Title Chapter Parallel Input/Output Control
127
ColdFire Core
Chapter Interrupt Controller CF1INTC
Analog Comparator 3V ACMPVLPV1
11.1.5
Internal Clock Source S08ICSV3
Chapter Inter-Integrated Circuit S08IICV2
Section Number Title
Real-Time Counter S08RTCV1
Serial Peripheral Interface S08SPIV3
Chapter Timer/Pulse-Width Modulator S08TPMV3
Chapter Version 1 ColdFire Debug CF1DEBUG
Appendix a Revision History
Devices in the MCF51QE128/64/32 Series
MCF51QE128 Series Features by MCU and Package
Feature MCF51QE128
Chapter Device Overview
Xosc
MCU Block Diagram
MCF51QE128/64/32 Block Diagram
Module Versions
V1 ColdFire Core
System Clocks
Internal Clock Source ICS Module
System Clock Distribution
Simplified ICS Block Diagram
Icsirclk
FLL Engaged External FEE
FLL Bypassed Internal Low-Power Fbilp
ICS Modes of Operation
FLL Engaged Internal FEI
Stop Stop
FLL Bypassed External Low-Power Fbelp
Get the latest version from freescale.com
Get the latest version from freescale.com
Device Pin Assignment
Chapter Pins and Connections
Pin Lqfp
Pins in bold are added from the next smaller package
Recommended System Connections
Basic System Connections
Oscillator
Power
Reset and Rsto
Background / Mode Select BKGD/MS
General-Purpose I/O and Peripheral Ports
ADC Reference Pins VREFH, Vrefl
Number Port Pin Alt
Pin Assignment by Package and Pin Sharing Priority
Pin
Priority
Port Pin Alt
Number
Get the latest version from freescale.com
Introduction
Features
Chapter Modes of Operation
Overview
MCF51QE128/64/32 Power Modes Conceptual Drawing
PMC
CPU / Power Mode Selections
Run Stop2 LPrun
Mode Regulator State
Stop3
Full On
Transition # From Trigger
Triggers for Transitions Shown in Figure
Secure Mode
Debug Mode
Run Modes
Run Mode
Low-Power Run Mode LPrun
BDM in Low-Power Run Mode
Wait Modes
Wait Mode
Low-Power Wait Mode LPwait
BDM in Low-Power Wait Mode
Stop2 Mode
Low-Range Oscillator Considerations for Stop2
Stop3 Mode
Stop4 Low Voltage Detect or BDM Enabled in Stop Mode
CF1CORE
On-Chip Peripheral Modules in Stop and Low-Power Modes
Low-Power Mode Behavior
Abbreviations used in Table
IRQ
BDC
COP
ICS
Get the latest version from freescale.com
Get the latest version from freescale.com
RAM
Chapter Memory
MCF51QE128/64/32 Memory Map
Kbytes
Long Byte
CPU Access Type Allowed by Region
Register Addresses and Bit Assignments
Read Write Base Address Region Byte
ColdFire Memory Organization
Direct-Page Register Summary Sheet 1
Register Address Name
Direct-Page Register Summary Sheet 2
Direct-Page Register Summary Sheet 3
High-Page Register Summary Sheet 1
Direct-Page Register Summary Sheet 4
High-Page Register Summary Sheet 2
High-Page Register Summary Sheet 3
High-Page Register Summary Sheet 4
0x0 0x1 0x2 0x3
Flash Module Reserved Memory Locations
High-Page Register Summary Sheet 5
Reserved Flash Memory Addresses
Nvprot
0x0 0x1 0x2 0x3 0x00000408
0x0000040C
Reserved Flash Memory Addresses Register
V1 ColdFire Interrupt Controller Memory Map
ColdFire Rapid Gpio Memory Map
ColdFire Interrupt Controller Memory Map
V1 ColdFire Rapid Gpio Memory Map
Intccfrc
RAM
Flash
Intcsfrc
Addresses Desired Value Values Programmed
Features
Lov-Voltage Programming Sequence Example
Fcdiv Field Descriptions
Register Descriptions
Flash Clock Divider Register Fcdiv
Flash Options Register Fopt and Nvopt
10. Fopt Field Descriptions
Flash Configuration Register Fcnfg
13. Flash Protection Address Range
Flash Protection Register Fprot and Nvprot
11. Fcnfg Field Descriptions
12. Fprot Field Descriptions
0x42
0x00-0x3F
0x40
0x41 0x00000-0x1EFFF
W1c
Command buffers are full
Flash Status Register Fstat
Fcbef Fccf Fpviol Faccerr Fblank
15. Fcmd Field Descriptions
Flash Command Operations
Flash Command Register Fcmd
Function Description
200 195 ⎟ 200 = 3%
Writing the Fcdiv Register
ALL Program and Erase
Command Write Sequence
Commands Impossible
Start
Fcmd NVM
Flash Commands
Erase Verify Command
16. Flash Command Description
Program Command
11. Example Program Command Flow
Burst Program Command
Programming
Sector Erase Command
Command Buffer Empty
Sequential
13. Example Sector Erase Command Flow
14. Example Mass Erase Command Flow
Mass Erase Command
Illegal Flash Operations
Flash Access Violations
Flash Protection Violations
Wait Mode
Background Debug Mode
Operating Modes
Security
Unsecuring the MCU using Backdoor Key Access
Program and Erase Times
Resets
Flash Reset Sequence
Reset While Flash Command Active
Security
Device is unsecure
Sync
Set PRDIV8 and clock divider fields in CSR3
Stop
Microcontroller Reset
Chapter Resets, Interrupts, and General System Control
Copclks Copt
COP Configuration Options
Computer Operating Properly COP Watchdog
Control Bits Clock Source COP Overflow Count
Interrupts and Exceptions
Illegal Operation Reset
Illegal Address Reset
Pin Configuration Options
External Interrupt Initialization
Power-On Reset Operation
Low-Voltage Detect LVD System
Edge and Level Sensitivity
Low-Voltage Warning LVW Interrupt Operation
LVD Reset Operation
Peripheral Clock Gating
LVD Interrupt Operation
Irqpdd
Interrupt Pin Request Status and Control Register Irqsc
Irqsc Register Field Descriptions
Irqpdd Irqedg Irqpe Irqf Irqie Irqmod Irqack
POR
System Reset Status Register SRS
POR LVR
System Options Register 1 SOPT1
SOPT1 Register Field Descriptions
System Options Register 2 SOPT2
IIC1PS SDA1 SCL1
System Device Identification Register SDIDH, Sdidl
SOPT2 Register Field Descriptions
SPI1PS SPSCLK1 MOSI1 MISO1 SS1
Lvdf Lvdie LVDRE2 Lvdse LVDE2 Bgbe Lvdack
Sdidh Register Field Descriptions
Sdidl Register Field Descriptions
LPR Lprs Lpwui Ppde Ppdc Ppdack
SPMSC1 Register Field Descriptions
SPMSC2 Register Field Descriptions
Lvdvlvwv
11. LVD and LVW Trip Point Typical Values1
Lvwf Lvdv Lvwv Lvwie
Lvwf
TPM3
System Clock Gating Control 1 Register SCGC1
System Clock Gating Control 2 Register SCGC2
12. SCGC1 Register Field Descriptions
FLS
13. SCGC2 Register Field Descriptions
RTC SPI2 SPI1
Freescale Semiconductor 109
110 Freescale Semiconductor
Freescale Semiconductor 111
112 Freescale Semiconductor
Freescale Semiconductor 113
Chapter Parallel Input/Output Control
Port Data and Data Direction
Data Direction Control Port Data Register Port Read
Port Internal Pull-up Enable
Port Slew Rate Enable
Pull-up, Slew Rate, and Drive Strength
Freescale Semiconductor 115
Port Data Set, Clear and Toggle Data Registers
Port Drive Strength Select
Port Data Clear Registers
V1 ColdFire Rapid Gpio Functionality
Keyboard Interrupts
Port Data Set Registers
Freescale Semiconductor 117
Edge Only Sensitivity
Edge and Level Sensitivity
Pull-up/Pull-down Resistors
Port a Registers
Pin Behavior in Stop Modes
Parallel I/O, Keyboard Interrupt, and Pin Control Registers
Keyboard Interrupt Initialization
PTAD7 PTAD6 PTAD5 PTAD41 PTAD3 PTAD2 PTAD1 PTAD0
Port a Pull Enable Register Ptape
Port a Data Register Ptad
Port a Data Direction Register Ptadd
PTASE7 PTASE6 PTASE5 PTASE4 PTASE3 PTASE2 PTASE1 PTASE0
Port a Slew Rate Enable Register Ptase
Port a Drive Strength Selection Register Ptads
PTAPE7 PTAPE6 PTAPE5 PTAPE4 PTAPE3 PTAPE2 PTAPE1 PTAPE0
Ptads Register Field Descriptions
Port B Registers
Port B Data Register Ptbd
Port B Data Direction Register Ptbdd
Ptbpe Register Field Descriptions
Port B Pull Enable Register Ptbpe
Port B Slew Rate Enable Register Ptbse
Ptbdd Register Field Descriptions
10. Ptbds Register Field Descriptions
Port C Registers
Port B Drive Strength Selection Register Ptbds
Port C Data Register Ptcd
12. Ptcdd Register Field Descriptions
Port C Data Direction Register Ptcdd
Port C Data Set Register Ptcset
Port C Data Clear Register Ptcclr
16. Ptcpe Register Field Descriptions
Port C Pull Enable Register Ptcpe
Port C Toggle Register Ptctog
14. Ptcclr Register Field Descriptions
Port D Data Register Ptdd
Port C Slew Rate Enable Register Ptcse
Port D Registers
Port C Drive Strength Selection Register Ptcds
20. Ptddd Register Field Descriptions
Port D Pull Enable Register Ptdpe
Port D Data Direction Register Ptddd
19. Ptdd Register Field Descriptions
Port E Data Register Pted
Port D Slew Rate Enable Register Ptdse
Port E Registers
Port D Drive Strength Selection Register Ptdds
25. Ptedd Register Field Descriptions
Port E Data Direction Register Ptedd
Port E Data Set Register Pteset
24. Pted Register Field Descriptions
PTEPE7 PTEPE6 PTEPE5 PTEPE4 PTEPE3 PTEPE2 PTEPE1 PTEPE0
Port E Pull Enable Register Ptepe
Port E Data Clear Register Pteclr
Port E Toggle Register Ptetog
30. Ptese Register Field Descriptions
Port E Slew Rate Enable Register Ptese
Port E Drive Strength Selection Register Pteds
29. Ptepe Register Field Descriptions
Port F Data Direction Register Ptfdd
Port F Pull Enable Register Ptfpe
Port F Registers
Port F Data Register Ptfd
35. Ptfse Register Field Descriptions
Port F Slew Rate Enable Register Ptfse
Port F Drive Strength Selection Register Ptfds
34. Ptfpe Register Field Descriptions
36. Ptfds Register Field Descriptions
Port G Registers
Port G Data Register Ptgd
Port G Data Direction Register Ptgdd
39. Ptgpe Register Field Descriptions
Port G Pull Enable Register Ptgpe
Port G Slew Rate Enable Register Ptgse
Port G Drive Strength Selection Register Ptgds
41. Ptgds Register Field Descriptions
Port H Registers
Port H Data Register Pthd
Port H Data Direction Register Pthdd
44. Pthpe Register Field Descriptions
Port H Pull Enable Register Pthpe
Port H Slew Rate Enable Register Pthse
Port H Drive Strength Selection Register Pthds
Port J Data Direction Register Ptjdd
Port J Registers
Port J Data Register Ptjd
49. Ptjpe Register Field Descriptions
Port J Pull Enable Register Ptjpe
Port J Slew Rate Enable Register Ptjse
Port J Drive Strength Selection Register Ptjds
52. KBI1 Pin Mapping
Keyboard Interrupt 1 KBI1 Registers
10.1 KBI1 Interrupt Status and Control Register KBI1SC
51. Ptjds Register Field Descriptions
10.3 KBI1 Interrupt Edge Select Register KBI1ES
Keyboard Interrupt 1 KBI2 Registers
10.2 KBI1 Interrupt Pin Select Register KBI1PE
58. KBI2PE Register Field Descriptions
11.1 KBI2 Interrupt Status and Control Register KBI2SC
11.2 KBI2 Interrupt Pin Select Register KBI2PE
57. KBI2SC Register Field Descriptions
Freescale Semiconductor 143
11.3 KBI2 Interrupt Edge Select Register KBI2ES
59. KBI2ES Register Field Descriptions
144 Freescale Semiconductor
Overview
Chapter ColdFire Core
Memory Map/Register Description
ColdFire Core Programming Model
Supervisor/User Access Registers
Supervisor Access Only Registers
Data Registers D0-D7
Data
Address Registers A0-A6
Supervisor/User Stack Pointers A7 and OTHERA7
Freescale Semiconductor 149
Condition Code Register CCR
CCR Field Descriptions
Program Counter PC
Vector Base Register VBR
CPU Configuration Register Cpucr
BWD
Status Register SR
SR Field Descriptions
Instruction Description
Functional Description
Instruction Set Architecture Isac
Instruction Enhancements over Revision Isaa
Exception Processing Overview
Assignment Numbers Offset Hex Counter
Exception Vector Assignments
Vector Stacked
SSP →
Exception Stack Frame Definition
Assignment
Numbers Offset Hex Counter
FS30 Definition
Fault Status Encodings
2.2 S08 and ColdFire Exception Processing Comparison
Format Field Encodings
RTI RTE
Exception Processing Comparison
Attribute S08 V1 ColdFire
Freescale Semiconductor 159
Access Error Exception
Address Error Exception
Processor Exceptions
OpwordLine Instruction Class
Illegal Instruction Exception
10. ColdFire Opword Line Definition
Line OpMode Effective Address
Freescale Semiconductor 161
Privilege Violation
Trace Exception
Debug Interrupt
RTE and Format Error Exception
Unimplemented Line-A Opcode
Unimplemented Line-F Opcode
Interrupt Exception
Fault-on-Fault Halt
Trap Instruction Exception
Unsupported Instruction Exception
VER REV
Reset Exception
Access User read-only BDM read-only
BDM Load 0x60 D0 Store 0x40 D0
11. D0 Hardware Configuration Info Field Description
Sramsz
12. D1 Hardware Configuration Information Field Description
Flashsz
Address10 Size Bus Additional Operations CR/W
Instruction Execution Timing
Timing Assumptions
13. Misaligned Operand References
Source Destination Ax+ D16,Ax D8,Ax,Xi*SF Xxx.wl
Move Instruction Execution Times
14. Move Byte and Word Execution Times
15. Move Long Execution Times
Effective Address Opcode An+ D16,An D8,An,Xn*SF Xxx.wl #xxx
Standard One Operand Instruction Execution Times
16. One Operand Instruction Execution Times
17. Two Operand Instruction Execution Times
Standard Two Operand Instruction Execution Times
Opcode Effective Address An+ D16,An D8,An,Xn*SF Xxx.wl #xxx
Miscellaneous Instruction Execution Times
18. Miscellaneous Instruction Execution Times
20. Bcc Instruction Execution Times
Branch Instruction Execution Times
19. General Branch Instruction Execution Times
HCS08
Chapter Interrupt Controller CF1INTC
Attribute
Interrupt Controller CF1INTC
V1 ColdFire Exception Vector Table
0x180 Next
0x134 Next SCI1rx 0x138 SCI1tx 0x13C IICx 0x140 KBIx 0x144
0x148 Next ACMPx 0x14C
0x150 Next SCI2rx 0x154 SCI2tx 0x158
Freescale Semiconductor 177
Interrupt Source Number
To V1 ColdFire core
Modes of Operation
External Signal Description
Memory Map and Register Definition
CF1INTC Memory Map
Memory Map
Intc Force Interrupt Register Intcfrc
Intcfrc Field Descriptions
Freescale Semiconductor 181
Intc Wake-up Control Register Intcwcr
INTCPL6P7,6 Field Descriptions
ENB
Intc Set Interrupt Force Register Intcsfrc
Intcwcr Field Descriptions
Offset CF1INTCBASE + 0x1F Intccfrc
Intc Clear Interrupt Force Register Intccfrc
Intcsfrc Field Descriptions
Intccfrc Field Descriptions
Vecn Swiack
Intc Software and Level-nIACK Registers n = 1,2,3,...,7
Priority within Level Midpoint
Interrupt Request Level and Priority Assignments
INTCSWIACK, INTCLVLnIACK Field Descriptions
10. Legend for Table
TPM2ch0 TPM2ch1 TPM2ch2 TPM2ovfl
12. V1 ColdFire Interrupt Assignments
TPM1ch0 TPM1ch1 TPM1ch2 TPM1ovfl
Handling of Non-Maskable Level 7 Interrupt Requests
Emulation of the HCS08’s 1-Level IRQ Handling
Initialization Information
Application Information
Freescale Semiconductor 189
Using INTCPL6P7,6 Registers
More on Software IACKs
ISR Code Snippet with Swiack
Freescale Semiconductor 191
192 Freescale Semiconductor
Freescale Semiconductor 193
Chapter Rapid Gpio Rgpio
V1 ColdFire Core
Freescale Semiconductor 195
RAM Rgpio
IFP
Core
OEP Dsoc
RGPIODATA150
Rgpio
Module
Pin Muxing + Pad Logic On-platform Bus
Rgpio Detailed Signal Descriptions
Detailed Signal Descriptions
Rgpio Module External I/O Signals
Rgpio Read Memory Map
Memory Map/Register Definition
Rgpio Write Memory Map
DIR
Rgpio Data Direction Rgpiodir
Rgpio Data Rgpiodata
Rgpiodir Field Descriptions
Rgpio Clear Data Rgpioclr
Rgpio Pin Enable Rgpioenb
Rgpioset Field Descriptions
Rgpio Set Data Rgpioset
Rgpio Toggle Data Rgpiotog
Rgpioclr Field Descriptions
Field Description 15-0 Rgpio Toggle Data
Application 1 Simple Square-Wave Generation
10. Rgpiotog Field Descriptions
TOG
11. Square-Wave Output Performance
Freescale Semiconductor 205
12. Emulated SPI Performance using Gpio Outputs
SPI Speed @ Relative CPU f = 50 MHz
29x
206 Freescale Semiconductor
Acmp Clock Gating
Acmp Configuration Information
ACMP/TPM Configuration Information
Chapter Analog Comparator 3V ACMPVLPV1
Interrupt Vectors
Freescale Semiconductor 209
210 Freescale Semiconductor
Stop2 Mode Operation
Block Diagram
Wait Mode Operation
Stop3 Mode Operation
Acie ACF AC IRQ ACMP1 ACMP0 ACO ACMOD1 ACMOD2 SET ACF
Register Definition
Status and Control Register ACMPxSC
Acbgs Acpe
Acmod
Interrupts
ACMPxSC Field Descriptions
Acme
214 Freescale Semiconductor
Freescale Semiconductor 215
Chapter Analog-to-Digital Converter S08ADC12V1
ADC Clock Gating
Analog-to-Digital Converter S08ADC12V1
ADC Channel Assignment
Module Configurations
Channel Assignments
Alternate Clock
Hardware Trigger
Temperature Sensor
Freescale Semiconductor 219
2provides a block diagram of the ADC module
AD27-AD0
Signal Properties
Name Function
Voltage Reference Low Vrefl
Analog Power Vddad
Analog Ground Vssad
Voltage Reference High Vrefh
Input Select
Coco
Input Channel Select
Adact
Status and Control Register 2 ADCSC2
Data Result High Register Adcrh
ADCSC2 Register Field Descriptions
ADCV11 ADCV10 ADCV9 ADCV8
Data Result Low Register Adcrl
Compare Value High Register Adccvh
ADR10 ADR9 ADR8
Adlpc
Configuration Register Adccfg
Compare Value Low Register Adccvl
Adccfg Register Field Descriptions
Input Clock Select
Pin Control 1 Register APCTL1
Clock Divide Select
Conversion Modes
ADPC15 ADPC14 ADPC13 ADPC12 ADPC11 ADPC10 ADPC9 ADPC8
Pin Control 2 Register APCTL2
10. APCTL1 Register Field Descriptions
ADPC23
Pin Control 3 Register APCTL3
11. APCTL2 Register Field Descriptions
ADPC15
ADPC16
12. APCTL3 Register Field Descriptions
ADPC21
ADPC20
Conversion Control
Clock Select and Divide Control
Input Select and Pin Control
Hardware Trigger
Freescale Semiconductor 231
Initiating Conversions
Completing Conversions
Aborting Conversions
Adiclk Adlsmp
Power Control
Sample Time and Total Conversion Time
13. Total Conversion Time vs. Control Conditions
Automatic Compare Function
MCU Wait Mode Operation
Stop3 Mode With Adack Enabled
MCU Stop3 Mode Operation
MCU Stop2 Mode Operation
Stop3 Mode With Adack Disabled
Freescale Semiconductor 235
ADC Module Initialization Example
Initialization Sequence
Pseudo-Code Example
Yes Read Adcrh Then Adcrl To Clear Coco Bit Continue
External Pins and Routing
Reset Initialize ADC Adccfg = ADCSC2 = ADCSC1 = Check No
COCO=1?
Freescale Semiconductor 237
Analog Supply Pins
Analog Reference Pins
Analog Input Pins
Noise-Induced Errors
Sources of Error
Sampling Error
Pin Leakage Error
Freescale Semiconductor 239
Code Width and Quantization Error
Linearity Errors
Lsb =
Code Jitter, Non-Monotonicity, and Missing Codes
Freescale Semiconductor 241
242 Freescale Semiconductor
Freescale Semiconductor 243
Stop2 Mode Considerations
Chapter Internal Clock Source S08ICSV3
External Oscillator
Internal Clock Source S08ICSV3
Freescale Semiconductor 245
246 Freescale Semiconductor
Freescale Semiconductor 247
HGO, RANGE, EREFS, ERCLKEN, Erefsten
2is the ICS block diagram
Rdiv Irefs
FLL Bypassed Internal Low Power Fbilp
FLL Bypassed External Low Power Fbelp
ICS Register Summary
Reference Divide Factor
ICS Control Register 1 ICSC1
ICSC1 Field Descriptions
Clks Rdiv Irefs Irclken Irefsten
Bdiv Range HGO Erefs Erclken Erefsten
ICS Control Register 2 ICSC2
ICS Trim Register Icstrm
ICSC2 Field Descriptions
DMX32 Irefst Clkst Oscinit FTRIM1 DRS
ICS Status and Control Icssc
Icstrm Field Descriptions
Icssc Field Descriptions
1024 32 40 MHz
Reference range FLL factor DCO range
512 16 20 MHz
608 19.92 MHz
IREFS=0 CLKS=10
Operational Modes
FLL Engaged Internal FEI
IREFS=1 CLKS=00 IREFS=0
FLL Bypassed External FBE
FLL Bypassed Internal Low Power Fbilp
FLL Engaged External FEE
FLL Bypassed Internal FBI
Stop
Mode Switching
FLL Bypassed External Low Power Fbelp
Bus Frequency Divider
External Reference Clock
Low Power Bit Usage
DCO Maximum Frequency with 32.768 kHz Oscillator
Internal Reference Clock
Local Clock
Fixed Frequency Clock
SOPT2IIC1PS
Module Configuration
Chapter Inter-Integrated Circuit S08IICV2
IIC1 Position Options
MCF51QE128 Series Block Diagram Highlighting the IIC Modules
Freescale Semiconductor 261
262 Freescale Semiconductor
Freescale Semiconductor 263
SCL Serial Clock Line
SDA Serial Data Line
= Unimplemented or Reserved
IIC Address Register Iica
IIC Frequency Divider Register Iicf
Iica Field Descriptions
Mult ICR SDA
Iicf Field Descriptions
Hold Time Values for 8 MHz Bus Speed
Hold Times μs
ICR SCL
IIC Divider and Hold Values
IICC1 Field Descriptions
IIC Control Register IICC1
TCF
IIC Status Register Iics
Iics Field Descriptions
Freescale Semiconductor 269
IIC Data I/O Register Iicd
IIC Control Register 2 IICC2
Iicd Field Descriptions
Gcaen
IIC Protocol
IICC2 Field Descriptions
Freescale Semiconductor 271
Start Signal
Slave Address Transmission
Data Transfer
Stop Signal
Repeated Start Signal
Arbitration Procedure
Freescale Semiconductor 273
Clock Synchronization
Handshaking
Clock Stretching
Master-Receiver Addresses a Slave-Transmitter
13.4.2 10-bit Address
Master-Transmitter Addresses a Slave-Receiver
Address Detect Interrupt
Resets
General Call Address
Byte Transfer Interrupt
276 Freescale Semiconductor
Module Use
Initialization/Application Information
Module Initialization Slave
Module Initialization Master
12. Typical IIC Interrupt Routine
Freescale Semiconductor 279
280 Freescale Semiconductor
RTC Modes of Operation
Chapter Real-Time Counter S08RTCV1
ADC Hardware Trigger
RTC Clock Sources
Interrupt Vector
Freescale Semiconductor 283
MCF51QE128 Block Diagram Highlighting RTC Block and Pins
Active Background Mode
Irclk
RTC Register Summary
LPO
Erclk
Rtif
RTC Status and Control Register Rtcsc
Rtcsc Field Descriptions
RTC Prescaler Divide-by values
Rtcmod Field Descriptions
RTC Counter Register Rtccnt
RTC Modulo Register Rtcmod
Rtccnt Field Descriptions
KHz Internal Clock MHz External Clock Rtclks =
RTC Operation Example
Prescaler Period
Rtcps
Freescale Semiconductor 289
Internal 1-kHz Clock Source RTC Clock Rtcps =
Rtccnt Rtif
0x52 0x53 0x54 0x55 0x00 0x01
290 Freescale Semiconductor
Freescale Semiconductor 291
Chapter Serial Communications Interface S08SCIV4
SCI Clock Gating
Serial Communications Interface S08SCIV4
Module Initialization
294 Freescale Semiconductor
Freescale Semiconductor 295
3shows the transmitter portion of the SCI
Freescale Semiconductor 297
SCI Receiver Block Diagram
Lbkdie
SCI Baud Rate Registers SCIxBDH, SCIxBDL
SCIxBDH Field Descriptions
Loops
SCI Control Register 1 SCIxC1
SCIxBDL Field Descriptions
Loops Sciswai Rsrc Wake ILT
TIE
SCI Control Register 2 SCIxC2
SCIxC2 Field Descriptions
Tdre Rdrf Idle
SCI Status Register 1 SCIxS1
SCIxD
Framing error
No parity error
Parity error
RXINV1
SCI Status Register 2 SCIxS2
SCIxS2 Field Descriptions
Lbkdif Rxedgif Rxinv Rwuid BRK13 Lbkde RAF
TXINV1
SCI Control Register 3 SCIxC3
SCIxC3 Field Descriptions
Txdir
Freescale Semiconductor 305
SCI Data Register SCIxD
Baud Rate Generation
Send Break and Queued Idle
Transmitter Functional Description
BRK13
Receiver Functional Description
Data Sampling Technique
Break Character Length
Idle-Line Wakeup
Receiver Wakeup Operation
Freescale Semiconductor 309
Interrupts and Status Flags
15.3.5.1 8- and 9-Bit Data Modes
Stop Mode Operation
Loop Mode
Additional SCI Functions
Freescale Semiconductor 311
Single-Wire Operation
312 Freescale Semiconductor
Freescale Semiconductor 313
Chapter Serial Peripheral Interface S08SPIV3
SPI Clock Gating
MCF51QE128 Block Diagram Highlighting SPI Block and Pins
Freescale Semiconductor 315
316 Freescale Semiconductor
Freescale Semiconductor 317
Block Diagrams
SPI System Block Diagram
SPI Module Block Diagram
Freescale Semiconductor 319
SPI Baud Rate Generation
SS Slave Select
Spsck SPI Serial Clock
Mosi Master Data Out, Slave Data
Miso Master Data In, Slave Data Out
SPIxC1 Field Descriptions
Modes of Operation
SPI in Stop Modes
SPI Control Register 1 SPIxC1
Modfen Ssoe
Master Mode Slave Mode
SPI Control Register 2 SPIxC2
SS Pin Function
Modfen Bidiroe Spiswai
SPI Stop in Wait Mode
SPI Baud Rate Register SPIxBR
SPIxC2 Register Field Descriptions
SPR
SPI Status Register SPIxS
SPIxBR Register Field Descriptions
Sppr
SPI Data Register SPIxD
SPI Clock Formats
Freescale Semiconductor 327
10. SPI Clock Formats Cpha =
11. SPI Clock Formats Cpha =
SPI Interrupts
Freescale Semiconductor 329
Mode Fault Detection
330 Freescale Semiconductor
Freescale Semiconductor 331
Chapter Timer/Pulse-Width Modulator S08TPMV3
TPM Clock Gating
Timer/Pulse-Width Modulator S08TPMV3
Freescale Semiconductor 333
334 Freescale Semiconductor
Freescale Semiconductor 335
336 Freescale Semiconductor
Freescale Semiconductor 337
TPM Block Diagram
Extclk
Signal Description
Freescale Semiconductor 339
TPMxCHn TPM Channel n I/O Pins
Extclk External Clock Source
High-True Pulse of an Edge-Aligned PWM
TOF
TPM Status and Control Register TPMxSC
TPMxSC Field Descriptions
TOF Toie Cpwms Clksb Clksa PS2 PS1
Clksbclksa
TPM Counter Registers TPMxCNTHTPMxCNTL
TPM-Clock-Source Selection
Prescale Factor Selection
Freescale Semiconductor 343
TPM Counter Modulo Registers TPMxMODHTPMxMODL
TPMxCNT158 Any write to TPMxCNTH clears the 16-bit counter
TPMxCNT70 Any write to TPMxCNTL clears the 16-bit counter
CHnF CHnIE MSnB MSnA ELSnB ELSnA
TPM Channel n Status and Control Register TPMxCnSC
TPMxMOD158
TPMxMOD70
Cpwms
MSnBMSnA ELSnBELSnA Mode Configuration
TPMxCnSC Field Descriptions
Mode, Edge, and Level Selection
TPMxCnV70
TPM Channel Value Registers TPMxCnVHTPMxCnVL
Mode, Edge, and Level Selection
TPMxCnV158
Freescale Semiconductor 347
Counter
Counter Clock Source
TPM Clock Source Selection
Counter Overflow and Modulo Reset
Output Compare Mode
Channel Mode Selection
Manual Counter Reset
Input Capture Mode
15. PWM Period and Pulse Width ELSnA=0
Edge-Aligned PWM Mode
Freescale Semiconductor 351
Center-Aligned PWM Mode
General
Reset Overview
Description of Reset Operation
Interrupt Summary
Timer Overflow Interrupt TOF Description
Interrupt Local Source Description Enable
Description of Interrupt Operation
Center-Aligned PWM Case
Channel Event Interrupt Description
Freescale Semiconductor 355
Chapter Version 1 ColdFire Debug CF1DEBUG
Bkgd BDC
Version 1 ColdFire Core CF1Core
OEP
PST
Csrhrl CSR2D1HRL
Modes of Operations
Debug Revision Summary
Revision
BDM?
BDM Command Types
Command Type Flash
Core Status Command Set
BDM GO
External Signal Descriptions
Debug Module Signals Description
CPU
DRc Register Name Width Access Reset Value Section Bits
Debug Module Memory Map
Configuration/Status Register CSR
TRC DDC UHE BTB NPL IPI SSM FID DDH
CSR Field Descriptions
Bstat FOF TRG Halt Bkpt HRL BKD IPW
TRC
Method Reference Details
Extended Configuration/Status Register Xcsr
Xcsr Reference Summary
CPU State
CPU Cstat Halt Stop Eseqc Clksw SEC Erase Enbdm
Apcsc Apce
Xcsr
Erase W
Eseqc W
SEC R
Syncpc Interval
Configuration/Status Register 2 CSR2
CSR2 Reference Summary
Xcsr CSR2
CSR2 Field Descriptions
Pstb Valid Data Locations Oldest to Newest
PSTBWA7
Start Condition Stop Condition
Configuration/Status Register 3 CSR3
10. CSR3 Reference Summary
Pstbss
BFCDIV8
BDM Address Attribute Register Baar
BFC Bfcdiv DIV8
SZM TTM TMM
Address Attribute Trigger Register Aatr
SZM
Signal of the processor’s local bus
BDM memory commands Normal processor access Else Reserved
Trigger Definition Register TDR
L1EA
L2ED
L2EA
L2T L1T
L2T
No inversion Invert data breakpoint comparators
Three bits disables the address breakpoint
Program Counter Breakpoint/Mask Registers PBR0-3, Pbmr
DRc 0x09 Pbmr
Mask Reset
15. PBR0 Field Descriptions
DRc 0x08 PBR0
Ablr
Address Breakpoint Registers ABLR, Abhr
17. Pbmr Field Descriptions
Abhr
21. Dbmr Field Descriptions
Data Breakpoint and Mask Registers DBR, Dbmr
19. Abhr Field Description
Resulting Set of Possible Trigger Combinations
Background Debug Mode BDM
22. Access Size and Operand Data Location
Address1 Access Size Operand Location
Cpucrard =
CPU Halt
23. CPU Halt Sources
Halt Source Halt Timing Description
Cpucrird =
Background Debug Serial Interface Controller BDC
BDM Communication Details
Freescale Semiconductor 385
15. BDC Host-to-Target Serial Bit Timing
16. BDC Target-to-Host Serial Bit Timing Logic
Freescale Semiconductor 387
BDM Command Set Descriptions
PST Trace Buffer Read Commands
Miscellaneous Commands
Memory Commands
Core Register Commands
VBR
24. BDM Command Code Field Descriptions
CRG
CRG CRN
Ackenable
BDM Command Set Summary
25. BDM Command Summary
Ackdisable
Readpstb
Readcreg
Readdreg
Writecreg
Syncpc
Freescale Semiconductor 393
Disable host/target handshake protocol Always Available
Enable host/target handshake protocol Always Available
0x03
0x3A Memory
Enter active background mode if enabled Non-intrusive
0x32 Host → Target Memory data7-0 Target → 0x36
Data7-0
0x3B
0x33
Xcsrsb
0x37
Target → Host 0x16 Memory
0x12 Memory data7-0
Target 0x16 Memory Data15-8 Memory data7-0
0x12 Memory
Read CPU control register Active Background
No operation Non-intrusive
Target Memory data7-0 Target → Host
Read debug control register Non-intrusive
0xA0+CRN Host → Target Dreg data
0x30 Address23-0
0x50+CRN Host → Target Pstb data
0x31
0x35
0x39
Read CSR3 Status Byte Always Available
Read general-purpose CPU register Active Background
Read Xcsr Status Byte Always Available
Read CSR2 Status Byte Always Available
Freescale Semiconductor 401
Synchronize PC to PST/DDATA Signals Non-intrusive
Write CPU control register Active Background
0xC0+CRN Creg data
Host → target
Write debug control register Non-intrusive
0x80+CRN Dreg data
0x10 Address23-0 Memory Data7-0
Write general-purpose CPU register Active Background
Write CSR3 Status Byte Always Available
Serial Interface Hardware Handshake Protocol
Write Xcsr Status Byte Always Available
Write CSR2 Status Byte Always Available
Freescale Semiconductor 405
19. Target Acknowledge Pulse ACK
20. Handshake Protocol at Command Level
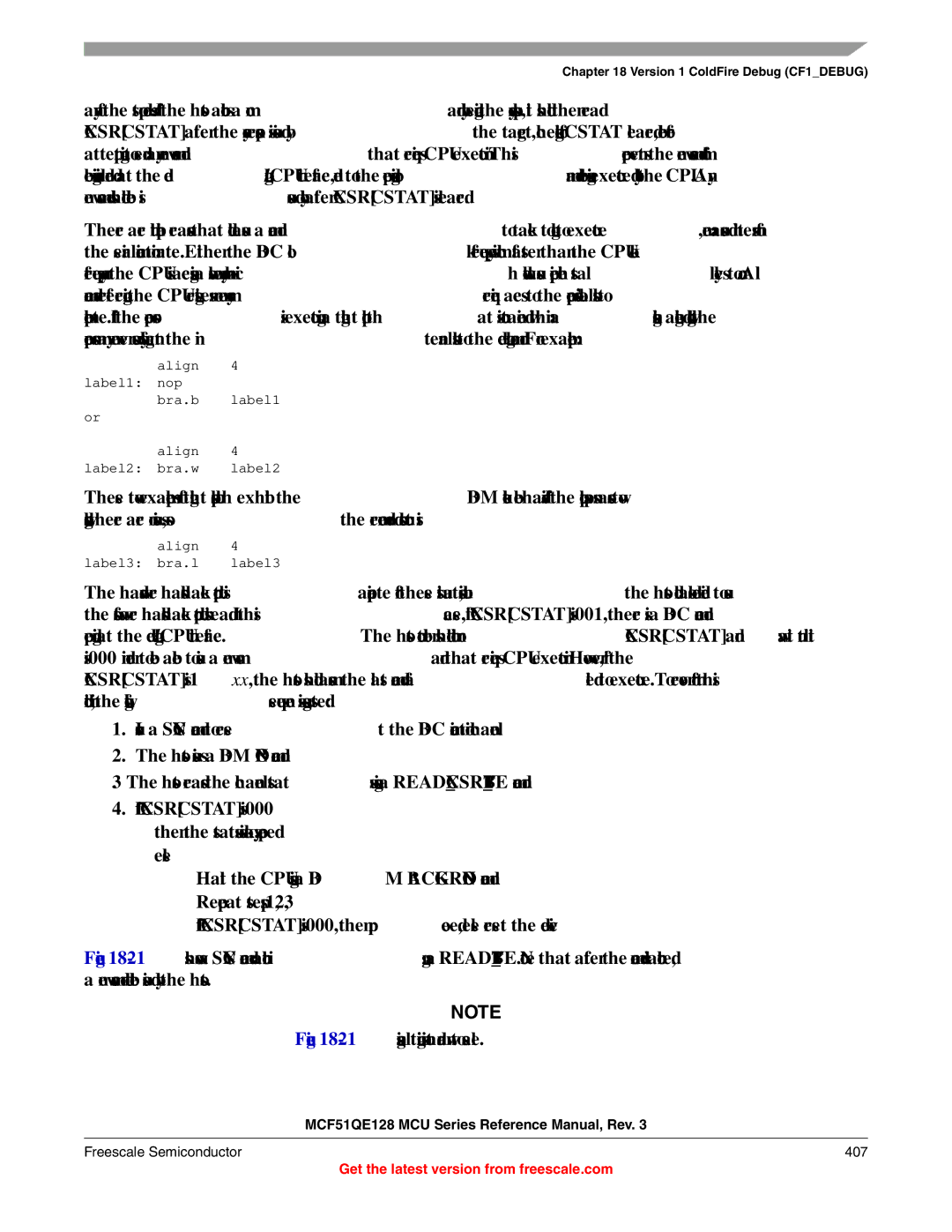
Hardware Handshake Abort Procedure
Freescale Semiconductor 407
21signal timing is not drawn to scale
21. ACK Abort Procedure at the Command Level
Freescale Semiconductor 409
Real-Time Debug Support
Real-Time Trace Support
Instructions, generate different encodings
Enter user mode
26. Processor Status Encodings
PST40 Definition
Freescale Semiconductor 411
Begin Execution of Taken Branch PST =
0x08-0x0B
PST Values Description
23. Example JMP Instruction Output in Pstb
Pstbddata
PST Trace Buffer Pstb
18.4.3.3 PST/DDATA Example
Pstbpst
Processor Status, Debug Data Definition
Freescale Semiconductor 415
27. PST/DDATA Specification for User-Mode Instructions
Instruction Operand Syntax
PST/DDATA
416 Freescale Semiconductor
Freescale Semiconductor 417
Supervisor Instruction Set
Freescale Semiconductor 419
GND Reset
Freescale-Recommended BDM Pinout
No Connect
420 Freescale Semiconductor
Chapter Description
Appendix a Revision History
Changes between Rev and Rev
MCF51QE128RM Rev to Rev Changes
Revision History
Page
How to Reach Us