After read this manual Keep it handy for future reference
Safety Messages
Hazardous High Voltage
General Precautions Read These First
Iii
Index to Warnings and Cautions in This Manual
Page
Wiring Cautions for Electrical Practice
Powerup Test Caution Messages
Vii
Viii
Page
General Warnings and Cautions
Inverter
Xii
Remote
Xiii
Terminal Tightening Torque and Wire Size
Wire Connectors
Xiv
Circuit Breaker and Fuse Sizes
Motor Overload Protection
Table of Contents
Xvii
Xviii
Revisions
Revision History Table
Xix
Contact Information
Getting Started
Main Features
Introduction
Operator Interface Options
Inverter Specification Label
040
X200 Inverter Specifications
Model-specific tables for 200V and 400V class inverters
Derating Curve
X200 Inverter Specifications, …
004HFEF 007HFEF 015HFEF 022HFEF
030HFEF 040HFEF
General Specifications
−10
Signal Ratings
−11
What is an Inverter
−12
Introduction to Variable-Frequency Drives
Purpose of Motor Speed Control for Industry
Inverter Input and Three-phase Power
−13
Torque and Constant Volts/Hertz Operation
−14
Inverter Output to the Motor
−15
Intelligent Functions and Parameters
Braking
−16
Velocity Profiles
Frequently Asked Questions
−17
−18
−19
Inverter Mounting Installation
This Chapter… Orientation to Inverter Features
Orientation to Inverter Features
Main Physical Features
Unpacking and Inspection
Front Housing Cover
Logic Connector Introduction
DIP Switch Introduction
Power Wiring Access First, ensure no power
Basic System Description
Inverter
Step-by-Step Basic Installation
Step Activity
Choosing a Mounting Location
Ensure Adequate Ventilation
Keep Debris Out of Inverter Vents
Check Inverter Dimensions
X200-005SFEF,007SFEF, -007NFU
X200-011SFEF~022SFEF, -015NFU~022NFU, -037LFU
X200-004HFEF, -004HFU
X200-007HFEF, -007HFU
X200-015HFEF~040HFEF, -015HFU~040HFU
This page is left intentionally blank…
Prepare for Wiring
Determining Wire and Fuse Sizes
Signal Lines
Applicable
Inverter Model
Terminal Dimensions and Torque Specs
Wire the Inverter Input to a Supply
−20
−21
−22
Wire the Inverter Output to Motor
Logic Control Wiring
−23
Powerup Test
Goals for the Powerup Test
−24
Uncover the Inverter Vents
Pre-test and Operational Precautions
Powering the Inverter
−25
Using the Front Panel Keypad
Key and Indicator Legend
−26
−27
Keys, Modes, and Parameters
−28
Keypad Navigation Map
−29
Selecting Functions and Editing Parameters
−30
−31
−32
−33
−34
Monitoring Parameters with the Display
Running the Motor
Powerup Test Observations and Summary
−35
Configuring 3 Drive Parameters
Choosing a Programming Device
Introduction of Inverter Programming
Using the Keypad Devices
Monitor Mode Programming Mode
Run Mode Edit
Operational Modes
Control Algorithms
Group Monitoring Functions
Stop
IN-TM Lhlhl
OUT-TM
Trip Event and History Monitoring
Local Monitoring During Network Operation
Group Main Profile Parameters
ACC
DEC
DIG-RUN FWD
Group Standard Functions
COM
2F-COM
OPE-Mode
Code Run Command Source
A001 Frequency Source Setting Method Refer to page…
A002 Run Command Setting Method Refer to page…
Basic Parameter Settings
Base
2F-BASE
MAX
Analog Input Settings
EXS
EXE
EX%S
EX%E
Multi-speed and Jog Frequency Setting
FRS
Torque Control Algorithms
Manual Torque Boost The Constant
Ctrl TRQ
2CTRL TRQ
DC Braking DB Settings
Normal DC braking performance⎯ The DC
OFF
DCB F
DCB
DCB T
Frequency-related Functions
Lim H 0000.0Hz
2Lim H 0000.0Hz
Lim L 0000.0Hz
Jump F1
Jump F2
Jump F3
Jump W1
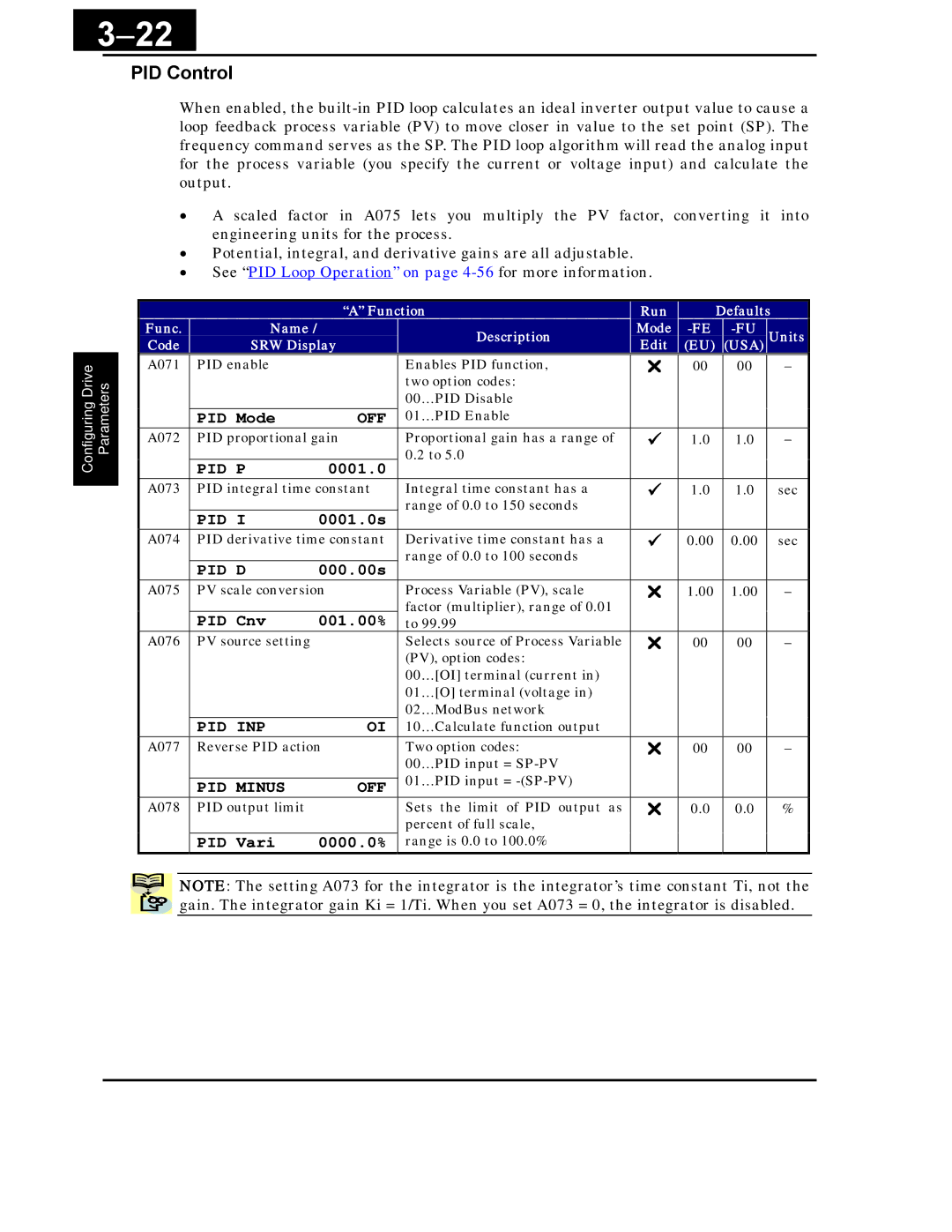
PID Control
AVR Mode
Automatic Voltage Regulation AVR Function
AVR AC
00230V
Energy Savings Mode / Optional Accel/Decel
RUN Mode NOR
ECO Adj 0050.0%
Second Acceleration and Deceleration Functions
2ACC2
2DEC2
ACC CHG
ACC CHfr 0000.0Hz
2ACCCHfr 0000.0Hz
DEC CHfr 0000.0Hz
2DECCHfr 0000.0Hz
Accel/Decel
ACC Line
DEC Line
Additional Analog Input Settings
Calc Slct1
POT
Calc Slct2
Calc Smbl
ST-PNT
ADD DIR Plus
Potentiometer Settings
Group Fine Tuning Functions
Automatic Restart Mode
IPS Powr ALM
IPS Trip OFF
IPS Retry
Cutoff
Electronic Thermal Overload Alarm Setting
THM LVL
2ETHM LVL
THM Char CRT
Overload Restriction
Frequency Pull-in Restart
Software Lock Mode
Mode Input
−36
Lock
−37
LockMD1
Non Stop Operation at Power OFF
−38
−39
Miscellaneous Settings
−40
−41
TRP
−42
FRS
−43
RUN FRS ZST
Stop DEC
−44
Panel
D001
FAN-CTRL OFF
B130, B131 Over-voltage LAD Stop Enable
−45
Ovladstop OFF
Ladst LVL
DC Bus AVR for deceleration Settings
−46
Miscellaneous Settings ~continuation~
−47
SUP Mode
−48
Cr-DEC
RDY-FUNC OFF
Input Terminal Configuration
−49
Group Intelligent Terminal Functions
−50
Intelligent Input Terminal Overview
−51
Input Function Summary Table Option
Function Name Description
−52
Anlg
−53
RDY
Output Terminal Configuration
−54
FA1
OUT-TM RY
−55
Output Function Summary Table Option
−56
LOC Mode CRT
−57
Low Load Detection Parameters
LOC LVL
Output Function Adjustment Parameters
−58
−59
Network Communications Settings
−60
Analog Signal Calibration Settings
−61
ADJ
OI-ADJ
−62
Miscellaneous Functions
DBG Slct
UP/DWN NO-STR
−63
Output Logic and Timing
LogicOut1
LogicOut2
−64
Dlay
Hold
Dlay RY
−65
Group Motor Constants Functions
Operations Monitoring
This Chapter…
Operations and Monitoring
Operations and Monitoring
Connecting to PLCs and Other Devices
Example Wiring Diagram
Optional
Control Logic Signal Specifications
AL2 AL1 AL0
Input Function Summary Table Symbol Code Function Name
Intelligent Terminal Listing
Intelligent Inputs
Intelligent Outputs
Using Intelligent Input Terminals
Sinking Inputs, Internal Supply
Sinking Inputs, External Supply
Forward Run/Stop and Reverse Run/Stop Commands
Terminal Function Name State Description
Valid for inputs C001~C005
A002 =
Multi-Speed Select
Function Name State Description
Valid for inputs
−13
Jogging Command
Option Terminal Function Name State Description
External Signal for DC Braking
Option Code Terminal Symbol Function Name State Description
A053, A054
Set Second Motor, Special Set
Option Terminal Function Name State
None
Two Stage Acceleration and Deceleration
Option Terminal Function Name
A092, A093, A094=00
Free-run Stop
Terminal Function Name
B003, B088, C011 to C015
External Trip
Unattended Start Protection
Software Lock
B031 excluded from lock
Analog Input Current/Voltage Select
A001 =
Reset Inverter
Terminal Function Name State Description Code
Thermistor Thermal Protection
Valid for inputs C005 only
Three-wire Interface Operation
PID ON/OFF and PID Clear
Remote Control Up and Down Functions
Remote Control Data Clears the Up/Down frequency memory
Force Operation from Digital Operator
Add Frequency Enable
A001, A145, A146
Force Terminal Mode
Inverter Ready
Safe Stop
Required settings
Using Intelligent Output Terminals
Sinking Outputs, Open Collector
Relay shown with inverter power ON, Run Signal OFF
Output Signal ON/OFF Delay Function
Output Signals
Run Signal
Option Terminal Function Name State Description Code
Frequency Arrival Signals
FA2
Overload Advance Notice Signal
FM terminal see Analog Output Operation
Output Deviation for PID Control
Alarm Signal
Or the relay outputs
Power Run Mode AL0-AL1 AL0-AL2
Analog Input Disconnect Detect
PID Second Stage Output
Terminal FBV configuration table is on the following
Transitions to OFF when the PID Feedback
Network Detection Signal Integrated ModBus
Watchdog time-out period with C077
Logic Output Function
Logical 0 result
Network Detection Signal FieldBus Option
Set P044=00.00 sec
Low Load Detection Signal
C038, C039
Analog Input Operation
Other Analog Input-related topics
AM output offset adjustment AM output gain adjustment
Analog Output Operation
PID Loop Operation
GND
PID Loop Configuration
Other PID-related topics
Configuring the Inverter for Multiple Motors
Inverter Configuration for Two Motor Types
Simultaneous Connections
Manual torque boost frequency adjustment
Inverter System Accessories
USA
Component Descriptions
AC Reactors, Input Side
AC Reactors, Output Side
Example calculation
Zero-phase Reactor RF Noise Filter
EMI Filter
RF Noise Filter Capacitive
Dynamic Braking
DC Link Choke
Dynamic Braking Usage
Troubleshooting Maintenance
Troubleshooting
Safety Messages
General Precautions and Notes
Inspection Items
Troubleshooting Tips
Symptom/condition Probable Cause Solution
Reduces output as needed
Fault Detection and Clearing
Error Codes
Error Name Causes Code
Monitoring Trip Events, History, & Conditions
Error Name Causes
Trip History and Inverter Status
Trip Conditions
Restoring Factory Default Settings
Action Display Func./Parameter
Maintenance and Inspection
Monthly and Yearly Inspection Chart
Megger test
X200
Spare parts
Capacitor Life Curves
General Inverter Electrical Measurements
Pf1 =
−13
Inverter Output Voltage Measurement Techniques
Igbt Test Method
Warranty
Warranty Terms
Glossary Bibliography
This Appendix…
Temperature
Glossary
EMI
Free-run Stop
Insulated Gate Bipolar TransistorIGBT a semiconductor
NEC
PWM
Squirrel Cage
Bibliography
Torque
ModBus Network Communications
Specifications
Connecting the Inverter to ModBus
SP SN
Settings
Func Name
03…ModBus network input
03… ModBus network input
Transmission procedure
Message Configuration Query
Network Protocol Reference
Slave address
Error check
Data
Function code
Header and trailer silent interval
Message Configuration Response
Response when an error occurs
Transmission time required
Normal response
No response occurs
Explanation of function codes
Read Coil Status 01h
Data
Field Name
Read Holding Register 03h
X200 D081
Frequency
Write in Coil 05h
10-11
Data Coil Status
Write in Holding Register 06h
Loopback Test 08h
Write in Coils 0Fh
Write in Holding Registers 10h
Exception Response
Function Code
Exception Code
Code Description
Store New Register Data Enter command
Submitting an Enter Command
ModBus Data Listing
ModBus Coil List
List of Coil Numbers Name Description
…OFF
ModBus Holding Registers
Res
Output frequency Real-time display of output
List of Holding Registers Func
Description Network Data Code Reg
Acceleration 1 time Standard default acceleration
Frequency source Five options select codes
4000 A024 Multi-speed 4 setting
List of Holding Registers Func Name Description
Code Reg
PID enable Enables PID function
Acceleration 2 time Duration of 2nd segment
OI-L input active Ending point offset for
Selection of automatic Select inverter restart method
Overload restriction Select the operation mode during
Deceleration time Range is 0.01 to
Restart mode after Selects how the inverter resumes 10D7h
B133 DC bus AVR Two option codes
See Input Terminal Configuration
Communication Settings on
See Output Logic and Timing on
Motor capacity …0.20kW
Drive Parameter Setting Tables
Parameter Settings for Keypad Entry
Group Parameters Default Setting
Main Profile Parameters
Name
Standard Functions
Func Name
Code
Name =10
Appendix
Fine Tuning Functions
Group Parameters
Func Name =10
Group Parameters Default Setting
Intelligent Terminal Functions
Motor Constants Functions
Expansion Card Functions
CE-EMC
CE-EMC Installation Guidelines
Integrated EMC Filter
Installation for X200 series example of Sfef models
Hitachi EMC Recommendations
Index
Index−2
EMI A-3
Index−3
LEDs 2-26,2-27,2-39,3-3 Line reactor A-5
Non stop operation at power OFF 3-38 AC reactor
Index−4
Index−5
Safe stop 2-5
Index−6