DV0P4490
AC Servo Motor and Driver
Driver Motor Console
Content
Example of Absolute Operation Setting
Example of Incremental Operation Setting
Example of Rotary Axis Operation Setting
Example of Dwell Timer Operation Setting
When an Error Alarm Has Occurred at Servo-ON Command
Operation Timing after Power-ON
When an Alarm Has Been Cleared at Servo-ON Command
Configuration of Absolute System
Supplement
Page
Driver Motor Console
Before Using the Products
Do not put your hands in the ser- vo driver
Before Using the Products
Do not give strong impact shock to the Product
Observe the specified voltage
Type Cycles Items to be inspected
Maintenance and Inspection
Inspection Items and Cycles
Smoothing capacitor Approx years Cooling fan To 3 years
Guideline for Parts Replacement
Product Component Standard replacement Cycles hour
Outline
Introduction
On Opening the Product Package
Check of the Driver Model
Check of the Motor Model
Specifications
Pulse count
Round
Check of the Combination of the Driver and the Motor
Incremental Specifications, 2500P/r
Absolute/Incremental Specifications, 17-bit
Parts Description
MADDT1207P Single phase, 200V, 200W A-frame
Driver
B-frame
F-frame
MEDDT7364P 3-phase, 200V, 2.0kW E-frame
Low inertia type Msmd series, 50W
Motor
Display/Touch panel
Console
Main Body
Installation Place
How to Install
How to Install
Environmental Conditions
Fan
Mounting Direction and Spacing
Or more
40mm or more 100mm or more
Oil/Water Protection
Permissible Load to Output Shaft
Stress to Cables
Remarks
How to Connect
Connect to CN
Preparation
Wiring to the Connector, CN X3
Pin RB1 6-pin, RB2 4-pin, RB3 5-pin
System Configuration and Wiring
Overall Wiring Connecting Example of C-frame, 3-phase
Connection to encoder
Wiring to Connector, CN
Connection to host controller
Connection with input power supply Remarks
Overall Wiring Connecting Example of E-frame
Pin P, B1 and B2
Connection to external components
Connection to motor driving phase and ground
Driver and List of Applicable Peripheral Equipments
Filter Absorber For signal Contactor
Noise Surge
Cable Driver
Noise
For signal contactor
Filter
Cable
Tips on Wiring
Wiring of the Main Circuit a to D-frame
Connect L1 and L1C, and L3 and L2C at single phase
Connect pin 3 of the connector on the driver side with pin
Case of Single Phase, 100V a and B-frame
Wiring Diagram
Case of Single Phase, 200V a and B-frame
Case of Single Phase, 200V C and D-frame
24V DC power supply for brake Surge absorber Fuse 5A
Wiring of the Main Circuit E and F-frame
Wiring method to connector a to D-frame
Case of 3-Phase, 200V E and F-frame
Using Handle Lever
Using Screw Driver
Msmd 50W to 750W MAMA100W to 750W MQMA100W to 400W
Wiring to the Connector, CN X6 Connection to Encoder
Msmd 50W to 750W Mama 100W to 750W MQMA100W to 400W
Wiring to the External Scale, Connector, CN
Wiring to the Connector, CN X7 Connection to External Scale
Application Connector Content PinNo
Remark
For detailed information, refer to P.42 to
Specifications of the Connector, CN
Manufacturer
Part name
12 to
Wiring for Connector CN
Output Circuit
Interface Circuit
Input Circuit
Common input signals
List of Signal for Connector CN
Application Code
Function
Ex When SV.Pr57 = 3 6 bits is set
Emergency stop input must be installed before using
Point No P32INP16INP8IN
Description
Output signal pulse train and function
Common output signals and their functions
Not-synchronized
Others
Synchronized
Initial Status of the Front Panel Display 7-Segment LED
Setup with the Front Panel
Composition of Touch Panel and Display
SV.Pr08
Output Signals Analog and Their Functions
Application Code Function
Output Timing of BRK-OFF Signal
Connecting Example
12 to 24V V DC COM Power supply Fuse For brake
Built-in Holding Brake
Engaging Releasing
Specifications of Built-in Holding Brake
Series Output Torque X10-4 Time
Voltage
After stalling Setup value of SV.Pr67
Sequence at main Driving condition Power-off SV.Pr67
Contents of deviation counter Clear Hold
Dynamic Brake
After stalling
Contents of deviation counter Hold
Memo
Outline of Setup Support Software, Panaterm
Setting
Auto-Gain Tuning Mode
Outline of Panaterm 103 How to Connect
How to Set
Parameter Setup
How to Connect
Outline of Parameter
Composition of Parameters
This document, following symbols represent each mode
Servo parameter
Bit positioning parameter
Function/Content PrNo Range
Power -ON
List of Servo Parameter
Parameters for Functional Selection
Unit Function/Content PrNo
Function/Content PrNo
Setup value Signal of IM
Baud rate Setup value
Setup value Instantaneous speed observer setup
Title Setup Unit Function/Content PrNo
Caused by distortion resonance Velocity feed
Set the second loop gain for position control
Servo Title Setup Unit Function/Content PrNo Range
Parameters for Auto-Gain Tuning
Unit Function/Content PrNo Range
Inertia ratio
Varying degree Auto-gain tuning Load inertia in motion
Title Setup Unit Function/Content PrNo Range
Setup value Content
Rotational direction
Filter mode Setup value
Parameters for Adjustment 2nd Gain Switching Function
Gain selection/switching
Gain switching condition
Parameters for Position Control
Servo Title Setup Function/Content PrNo
SV.Pr46 Phase logic Output source
Pulse output resolution=
Servo Title
Numerator SV.Pr44 Output pulse ratio 10000
Title Setup Function/Content PrNo Range
Parameters for Input Signals
Smoothing filter You can set the time constant
Time constant
Point specifying
Input logic setting
Parameters for Sequence
Parameters for Velocity and Torque Limit
After stalling Content
Action of main power low voltage protection
Setup Action Deviation counter Value
Action delay time tb of the brake
Sequence at You can set up Servo-OFF
After setting up SV.Pr6a = tb
Setup time, or time lapse till
Remarks
Parameters for Protective function
External resistor but no
Parameters for Full-Closed Control
List of 16-bit Positioning Parameters
Unit Function/Content
Parameters for Motor speed
Parameters for Acceleration and Deceleration
Parameters for Homing
Title Setup Unit Function/Content
Parameters for Jog operation
CCW is a positive direction and CW is a negative direction
Other Parameters
Deceleration in jog
List of 32-bit Positioning Parameters
Step Title Setup range Unit Function/Content PrNo
List of Step Parameters
Console display
Model No
Setup of Torque Limit
SV.Pr5E,5F
Applicable motor Max. value
When you want to obtain the max. motor torque
When the motor torque is limited
Setup with the Console
How to Use the Console
Initial Status of the Console Display 7 Segment LED
Composition of Display/Touch panel
Mode Change
Mode switch button
Monitor Mode
Selection display
Execution display
Position control mode Full-closed control mode
Display of Control Mode
Display of I/O Signal Status
Point Number Conversion Table
Signal No. and its title
Alarm Display
Reference of Error Factor and History
Over-load alarm
Over-regeneration alarm
Switching of the Driver to be Communicated
Display of Feedback Pulse Sum, Command Pulse Sum
Display of Regenerative Load Factor
Display of Over-load Factor
Overview of Teaching Mode
Teaching Mode
Teaching Mode Setup
Operation at Selection display
Step parameter setting
Target position setting
Test Mode Step operation
Homing
Jog operation
Structure of Parameter Setup Mode
Parameter setup mode
Step Parameter
Bit Positioning Parameter
How to Use the Console
Digit next to the blinking decimal point can be modified
Servo Parameter
Movement to a high order position is limited per parameter
Eeprom Writing Operation at Selection display
Eeprom Write Mode
Remarks Dont disconnect the console from the driver between
Auto-Gain Tuning Mode
Normal Mode Auto-Gain Tuning Screen
Alarm Clear
Auxiliary Function Mode
Alarm Clear Screen
Absolute encoder clear
Then press to make a display to
Alarm Clear Screen
Clearing of Absolute Encoder
101
Copying Function Console Only
102
Procedure of install
Install the Panaterm to Hard Disc
Connecting cable DV0P1960
103
104
Procedure of log on
Log on of the Panaterm
Operation Settin g
Overview of Operation Setting
Step Operation
Procedure Description
Step Operation
107
Operation mode Description
Example of Incremental Operation Setting
Step Operation Mode
Setting of 16-bit positioning parameter
Example of Absolute Operation Setting
Setting of step parameter
Wrap around
Setting of 32-bit positioning parameter
Example of Rotary Axis Operation Setting
Control mode
Coordinate is set to
Servo off
Example of Dwell Timer Operation Setting
Setting of step data
Jog Operation
Jog Operation
16.Pr Description
Set the parameters below when performing the jog operation
Parameters related to jog operation
Homing is completed when the power supply turns on
Homing Mode List
Homing Operation
Homing Operation
115
Parameters related to this operation
Home Sensor + Z Phase based on the front end
Positive direction Home sensor
116
117
Home Sensor based on the front end
Positive direction
118
Home sensor + Z phase based on the rear end
Direction of homing
119
120
Limit Sensor + Z phase
Example An operation in a positive direction
Limit Sensor
Direction of homing Positive direction
121
Bumping Homing
Phase Homing
Stopper etc
122
Example
Data Set
Direction of homing Home position = current position
123
Homing Offset Operation
Timing chart
Example of homing offset Homing offset is set to +5000
124
Positioning completion output
Emergency Stop Operation/Deceleration-and-Stop Operation
And-stop
An operation stop in the deceleration time
Temporary Stop Operation
Restart of operation Same procedure as a step operation
Temporary Stop Operation
126
16.Pr54 Description Block operation type setting
Continuous block operation procedure example
Block Operation
Overview of Block Operation
Combined Block Operation
ST.Pr Operation mode
Combined block operation procedure example
Sequential Operation
Sequential Operation
Example of Operation
Homing operation at sequential operation
Example of calculation 2500 p/r encoder
Shaped Acceleration/Deceleration Function
Example Linear acceleration t2 =
Shaped % t2 =
Strobe signal STB
Timing Chart
Operation Timing after Power-ON
T1 *1
When an Error Alarm Has Occurred at Servo-ON Command
To 5 ms
Alarm Clear can be input in the two ways below
When an Alarm Has Been Cleared at Servo-ON Command
Point input P1IN to P32IN CN X5 Pin 3, 4, 5, 6, 7
Multi function input EX-IN1/EX-IN2 CN X5 Pin 22/25
Servo-ON/OFF Action While the Motor Is in Motion
Servo-ON/OFF Action While the Motor Is at Stall Servo-Lock
Servo-ON input
Brake release output
Battery for Backup Installation
Configuration of Absolute System
Absolute System
Overview of Absolute System
Reference
Close the cover of the battery box
Cycles/day
Cycle/day
When you make your own cable for 17-bit absolute encoder
Setup Initialization of Absolute Encoder
Installation Place
Normal homing
139
Clearing Absolute Encoder Using a console
Using the setup support software Panaterm
Outline of Full-Closed Control
What Is Full-Closed Control ?
Preparation for full-closed control
140
Adaptive Filter 147
Adjustment
Instantaneous Speed Observer 160 Damping Control 161
141
Procedures
Gain Adjustment
Purpose
Ball screw
Explanation
Type
How to Operate
Real-Time Auto-Gain Tuning Mode
Outline
Applicable Range
Writing to Eeprom
Setup of parameter, Pr21
Setup of parameter, Pr22
SV.PrNo Title
Parameters Which Are Automatically Set
1st position loop gain Velocity feed forward
1st velocity loop gain Feed forward filter time constant
Invalidation of Adaptive Filter
Adaptive Filter
Conditions which obstruct normal auto-gain tuning
Normal Mode Auto-Gain Tuning
This function works under the following condition
Too small or too big compared to the rotor inertia
Table of auto-gain tuning
Auto-Gain Tuning Action
Title Stiffness value
90108135162 206251305377449
An arrow shows by pressing
How to Operate from the Console
Changes toward the reversed direction
By pressing
SV.Pr2F 1st notch frequency Hz
Invalidation of Real-Time Auto-Gain Tuning
Before Making a Manual Adjustment
Manual Gain Tuning Basic
Analog monitor output
Waveform graphic function of the Panaterm
Title of parameter Value How to adjust SV.Pr
Adjustment in Position Control Mode
Title of parameter
SV.Pr
Setup of external scale ratio
Adjustment in Full-Closed Control Mode
Setup of hybrid deviation excess
154
You want to increase the response by increas
Gain Switching Function
Ing the gain in motion
Example
156
Setup of Gain Switching Condition
Fig. C
Fig.A
Adaptive filter SV.Pr23, SV.Pr2F
Suppression of Machine Resonance
1st and 2nd notch filter SV.Pr1D, 2E, 28, 29 and 2A
Adaptive filter
159
How to Check the Resonance Frequency of the Machine
Relation of Gain Adjustment and Machine Stiffness
How to Use
Manual Gain Tuning Application
Adjustment at normal position control
Setup of instantaneous velocity observer SV.Pr27
Setup of damping filter switching selection
Setup of damping filter 1st SV.Pr2C, 2nd SV.Pr2E
Damping Control
SV.Pr24
162
163
When in Trouble
What to Check ?
Protective Function What is Error Code ?
Host controller
Machine Motor
Protective Function Detail of Error Code
Over-heat
Protective Error Causes Measures Function
Over-load
166
Data error
Cation error
Communi
Cation
Down error
Error Causes Measures Function
Over error
Status error
ID setting
Limit error
Scale auto Recognition Error pro Tection Motor auto
Recognition Error Protection Other error
Software Limit Function
Time characteristics of Err16 Overload protection
This function works under the following conditions
Conditions under which the software limit works
When the load moves to the left at Servo-ON
When no position command is entered Servo-ON status
When the load moves to the right at Servo-ON
Wiring
Troubleshooting
Motor Does Not Run Motor Stops During an Operation
Causes Countermeasures
Point Deviates Positioning Accuracy is Poor
Installation
Home Position Slips
Abnormal Motor Noise or Vibration
174
Parameter Returns to Previous Setup
Causes Countermeasures Wiring
Conformity to EC Directives and UL Standards
Supplement
Permissible Load at Output Shaft/Motor with Gear Reducer
175
Composition of Peripheral Equipments
Conformity to EC Directives and UL Standards
Circuit Breaker
Power Supply
Noise Filter
Option part No
Surge Absorber
Ground-Fault Breaker
Noise Filter for Signal Lines
Grounding
Conformity to UL Standards
Pin disposition for encoder connector
Specifications of for Motor Connector
Pin disposition for motor/brake connector with brake
Pin disposition for motor/brake connector without brake
Motor type Type of junction cable
Table for junction cable by model of Minas A4P series
Title Manufacturer
Junction Cable for Encoder
Junction Cable for Motor ROBO-TOP105˚C 600V DP
Junction Cable for Brake ROBO-TOP105˚C 600V DP
Junction Cable for Motor with Brake ROBO-TOP105˚C 600V DP
Setup Support Software Panaterm
Connector Kit for External Peripheral Equipments
Interface Cable
Communication Cable for connection to PC
For DVOP2490, DV0P3480 Recommended manual crimp tool
Connector Kit for Motor/Encoder Connection
Mgma 2.0kW to 4.5kW
500W to 1.5kW
Mhma 2.0kW to 5.0kW
Mounting Bracket
Mounting Dimensions
Part No. DV0P4420
Upper side Bottom side
Harmonic restraint
Motor Power Rated Series Supply Output
Reactor
Options
Surge Absorber for Motor Brake
Recommended components
List of Peripheral Equipments Reference only
Motor Surge absorber for motor brake
192
Dimensions Driver
Mass 0.8kg
193
Mass 1.5kg
Mass 1.7kg
194
Mass 3.2kg
Mama 100W to 750W
Dimensions Motor
3h9
Motor output Motor model
100W 5A * P1 5A * S1 01 * P1 01 * S1
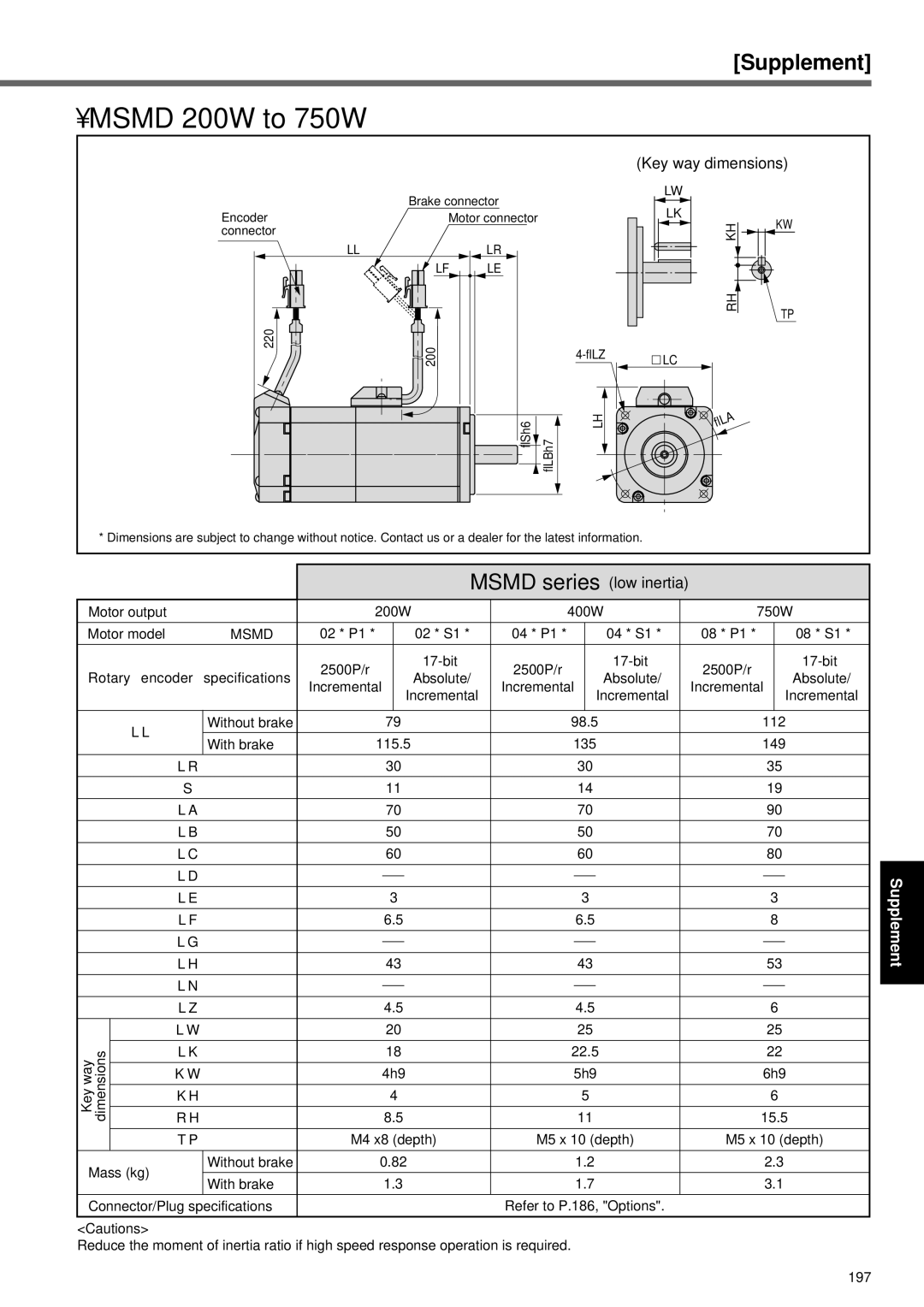
Msmd 200W to 750W
01 * P1 01 * S1 02 * P1 02 * S1
Mqma 100W to 400W
04 * S1
126.5
Msma 1.0kW to 2.0kW
Msma 3.0kW to 5.0kW
Mdma 1.0kW to 1.5kW
0kW 20 * P1 20 * S1 30 * P1 30 * S1 2500P/r Incremental
Rotary encoder Specifications Without brake With brake
Mdma 2.0kW to 3.0kW
Mdma 4.0kW to 5.0kW
2500P/r Incremental 17-bit Absolute/Incremental
Mgma 900W to 2.0kW
207
13.5
Mgma 3.0kW to 4.5kW
04 * P1 04 * S1 15 * P1 15 * S1 2500P/r Incremental
Mfma 400W to 1.5kW
Motor output 5kW Motor model
Mfma 2.5kW to 4.5kW
25 * P1
Without brake 139
500W 0kW 5kW 05 * P1 05 * S1 10 * P1 10 * S1 15 * P1 15 * S1
Mhma 500W to 1.5kW
Mhma 2.0kW to 5.0kW
Permissible Load at Output Shaft
Motor At assembly During running Motor output Thrust load
Radial load P direction Thrust load a and B direction
Series Radial thrust Direction
MQMA021 MQMA022
With and without oil seal MQMA011 MQMA012
MQMA041 MQMA042
Without oil seal MAMA012 MAMA022
Without oil seal With oil seal MSMD5AZ
Motor Characteristics S-T Characteristics
MSMD011
MSMD012
MSMD022
Without oil seal With oil seal MSMD021
MSMD041
MSMD042
MSMA202
MSMA102 MSMA152
MSMA302
MSMA402
MDMA502
With oil seal MDMA302 MDMA402
With oil seal MFMA042 MFMA152
MFMA252 MFMA452
MHMA152 MHMA202
MHMA052 MHMA102
MHMA302 MHMA402
MHMA502
Motor with Gear Reducer
Absolute/Incremental specifications, 17bit
Model No. of Motor with Gear Reduce
Combination of Driver and Motor with Gear Reducer
Without brake With brake
Dimensions/Motor with Gear Reducer
Motor with Gear Reducer
Brake
Permissible load at shaft Motor output Radial thrust
Remarks on installation
LR/2
220
To driver Output MSMD011 * * 1N MSMD011 * * 2N
Supply Reduction Ratio
100W
MSMD021 * * 1N MSMD021 * * 2N
Gate drive
Block Diagram of Driver
223
Internal Block Diagram of MINAS-A4P Driver E and F-frame
Position Control Mode
Block Diagram by Control Mode
When Pr02 Setup of control mode is
+ +
225
Full-closed Control Mode
Specifications Driver
Unnecessary wiring
Setting range Number of points
Encoder feedback pulse Protection Hardware error
Function Software error
Servo parameter SV.Pr
Default Parameters for all the models of A4P Series
229
Bit positioning parameter 16.Pr
Bit positioning parameter 32.Pr
230
231
Repair
After-Sale Service Repair
Technical information
Date Model No Purchase Dealer Tel