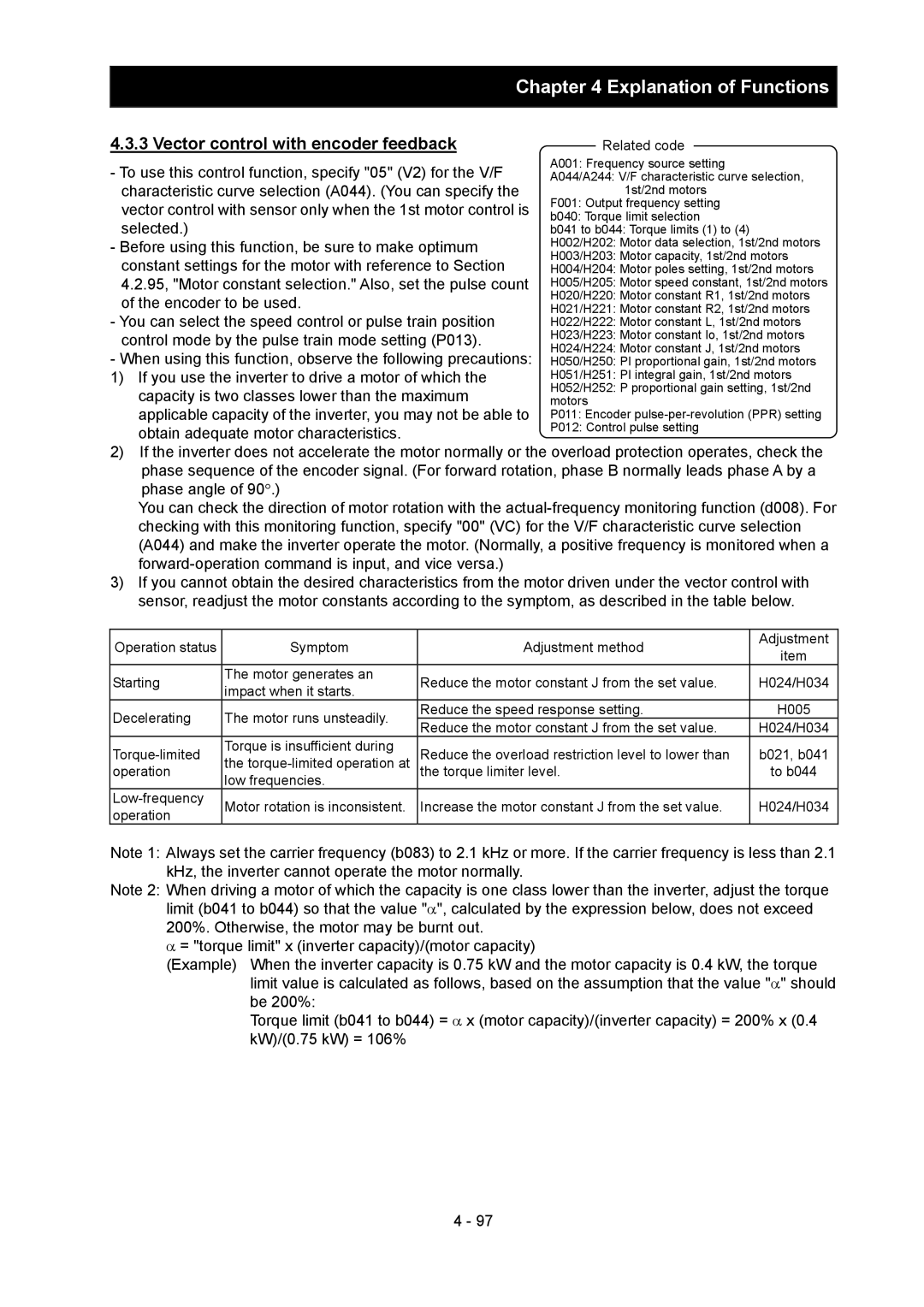
4.3.3 Vector control with encoder feedback
- To use this control function, specify "05" (V2) for the V/F characteristic curve selection (A044). (You can specify the vector control with sensor only when the 1st motor control is selected.)
- Before using this function, be sure to make optimum constant settings for the motor with reference to Section 4.2.95, "Motor constant selection." Also, set the pulse count of the encoder to be used.
- You can select the speed control or pulse train position control mode by the pulse train mode setting (P013).
- When using this function, observe the following precautions: 1) If you use the inverter to drive a motor of which the
capacity is two classes lower than the maximum applicable capacity of the inverter, you may not be able to obtain adequate motor characteristics.
2)If the inverter does not accelerate the motor normally or the overload protection operates, check the phase sequence of the encoder signal. (For forward rotation, phase B normally leads phase A by a phase angle of 90°.)
You can check the direction of motor rotation with the
3)If you cannot obtain the desired characteristics from the motor driven under the vector control with sensor, readjust the motor constants according to the symptom, as described in the table below.
Operation status | Symptom | Adjustment method | Adjustment | |
item | ||||
|
|
| ||
Starting | The motor generates an | Reduce the motor constant J from the set value. | H024/H034 | |
impact when it starts. | ||||
|
|
| ||
Decelerating | The motor runs unsteadily. | Reduce the speed response setting. | H005 | |
Reduce the motor constant J from the set value. | H024/H034 | |||
|
| |||
Torque is insufficient during | Reduce the overload restriction level to lower than | b021, b041 | ||
the | ||||
operation | the torque limiter level. | to b044 | ||
| low frequencies. |
|
| |
Motor rotation is inconsistent. | Increase the motor constant J from the set value. | H024/H034 | ||
operation | ||||
|
|
|
Note 1: Always set the carrier frequency (b083) to 2.1 kHz or more. If the carrier frequency is less than 2.1 kHz, the inverter cannot operate the motor normally.
Note 2: When driving a motor of which the capacity is one class lower than the inverter, adjust the torque limit (b041 to b044) so that the value "α", calculated by the expression below, does not exceed 200%. Otherwise, the motor may be burnt out.
α= "torque limit" x (inverter capacity)/(motor capacity)
(Example) When the inverter capacity is 0.75 kW and the motor capacity is 0.4 kW, the torque limit value is calculated as follows, based on the assumption that the value "α" should be 200%:
Torque limit (b041 to b044) = α x (motor capacity)/(inverter capacity) = 200% x (0.4 kW)/(0.75 kW) = 106%
4 - 97