90000847C Release date 10 April
NS9215 Hardware Reference
Page
Page
Page
Contents
A p t e r 3 W o r k i n g w i t h t h e C P U
102
105
A p t e r 4 S y s t e m C o n t r o l M o d u l e 137
141
A p t e r 5 M e m o r y C o n t r o l l e r 203
Sram
Bit wide configuration 228 229
Hardware Reference NS9215
HT1
315
A p t e r 7 E x t e r n a l D M a 339
Hardware Reference NS9215
A p t e r 9 I / O H u b M o d u l e 363
Hardware Reference NS9215
A p t e r 1 1 S e r i a l C o n t r o l D u l e H D L C 415
Hardware Reference NS9215
A p t e r 1 4 R e a l T i m e C l o c k M o d u l e 459
A p t e r 1 6 T i m i n g 479
A p t e r 1 7 P a c k a g i n g 513
Hardware Reference NS9215
Heading Description
Pinout
M o r y b u s i n t e r f a c e
Pin Signal Description
N O U T 2 6
H e r n e t i n t e r f a c e M a C
Pin Signal
Sdram RAS
Sdram CAS
N e r a l p u r p o s e I / O G P I O
CTS Uart a
DCD Uart a
DSR Uart a
RXD Uart a
CTS Uart C
DCD / TXC Uart C
I2C SCL
Picdbgdataini
CTS Uart B
DCD Uart B
DSR Uart B
RXD Uart B
RXD Uart D
DSR Uart D
RI Uart D
TXC / DTR Uart D
Pin Signal Description
PIC1CLKO
PIC1CLKI
Pin Signal Description
PIC0CLKO
PIC0CLKI
Pin Signal Description
Pin Signal Description
Pin Signal Description
I/O OD
S t e m c l o c k
System clock drawing
S t e m m o d e
RTC clock and battery backup drawing
Sysmode2 Sysmode1 Sysmode0 Description
SPI YES
S t e m r e s e t
A G T e s t
Adcvss
POR VSS
R a n d b a t t e r y b a c k e d l o g i c
GND
W e r a n d g r o u n d
Power and ground
N t r o l a n d S t a t u s r e g i s t e r s
Address Description Access Reset value
System memory bus I/O control
Register address Map
Control and Status registers
I O C o n f i g u r a t i o n r e g i s t e r s
Gpio configuration options
Bits Mnemonic Description
Configuration Register #1
Configuration Register #0
Bits Access Mnemonic Reset Description
Address A0902000
Configuration Register #3
Configuration Register #2
Address A0902008
Address A090200C
Configuration Register #5
Configuration Register #4
Address A0902010
Address A0902014
Configuration Register #7
Configuration Register #6
Address A0902018
Address A090201C
Configuration Register #9
Configuration Register #8
Address A0902020
Address A0902024
Configuration Register #11
Configuration Register #10
Address A0902028
Address A090202C
Configuration Register #13
Configuration Register #12
Address A0902030
Address A0902034
Configuration Register #15
Configuration Register #14
Address A0902038
Address A090203C
Configuration Register #17
Configuration Register #16
Address A0902040
Address A0902044
Configuration Register #19
Configuration Register #18
Address A0902048
Address A090204C
Configuration Register #21
Configuration Register #20
Address A0902050
Address A0902054
Configuration Register #23
Configuration Register #22
Address A0902058
Address A090205C
Configuration Register #25
Configuration Register #24
Address A0902060
GPIOAddress A0902064
Address A0902068
Configuration Register #26
Gpio Control
I O C o n t r o l r e g i s t e r s
Address A090206C
Address A0902070
Address A0902074
Address A0902078
Gpio Status
I O S t a t u s r e g i s t e r s
Address A0902080
Address A0902084
Address A0902088
M o r y B u s C o n f i g u r a t i o n r e g i s t e r
Address A090208C
CS1
CS0
CS2
CS3
High data bus pullup control
Apudis
Memory Bus Configuration register
About the processor
Working with the CPU
S t r u c t i o n s e t s
Process block Diagram
Arm926EJ-S
ARM instruction set Thumb instruction set
Java instruction set
Accessing CP15 registers
ARM926EJ-S system addresses Address manipulation example
Mnemonics for these instructions are
Terms and abbreviations
Term Abbreviation Description
For reads
Register summary
Be ZERO, does not cause any physical damage to the chip
Register Reads Writes
TLB
Writing to register R0 is Unpredictable
This is the contents of the ID code register
R0 ID code
Any value other than 1 or 2. Note this example
Dsize and Isize fields
Cache type register and field description
Field contains these bits
Field Description
Size field Cache size
O n t r o l r e g i s t e r
Assoc field Associativity
Len field Cache line length
Bit functionality
Control register
Bits Name Function
DCache behavior
ICache
Cache
Behavior
Access permissions and instructions
CRm and opcode2 fields should be Zero when writing to R2
R a n s l a t i o n T a b l e B a s e r e g i s t e r
O m a i n a c c e s s C o n t r o l r e g i s t e r
Access instructions
Fault S t a t u s r e g i s t e r s
E g i s t e r
Register bits
Status and domain fields
Fault a d d r e s s r e g i s t e r
Priority Source Size Status Domain
Function Description
A c h e O p e r a t i o n s r e g i s t e r
Function/operation Data format Instruction
Cache operation functions
MVA
Modified virtual address format MVA Set/Way format
Set/Way example Test and clean DCache instructions
L B O p e r a t i o n s r e g i s t e r
Test, clean, and invalidate DCache instruction
Unpredictable
Operation Data Instruction
Modified virtual address format MVA
A c h e L o c k d o w n r e g i s t e r
Cache ways
That allows you to control each cache way independently
Instruction or data lockdown register
Access
Instructions
Modifying the Cache Lockdown register Register format
For each of the cache lines to be locked down in cache way
0 T L B L o c k d o w n r e g i s t e r
Cache unlock procedure
Bit
Which region the TLB entry is placed
3 P r o c e s s I D r e g i s t e r
1 a n d R 1 2 r e g i s t e r s
Programming instructions Sample code sequence
Use these instructions to program the TLB Lockdown register
Performing a fast context switch
Fcse PID register Access instructions
Register format This is the format of the Fcse PID register
Function Data ARM instruction
Accessing reading or writing this register is reserved
Context ID register Access instructions
4 r e g i s t e r
5 T e s t a n d d e b u g r e g i s t e r
M o r y M a n a g e m e n t U n i t M M U
MMU Features
State space servo control
Protection scheme
Access permissions and domains Translated entries
Register Bits Description
MMU program accessible registers Address translation
TTB register Format
Translation table base
First-level fetch
Table walk process
First-level descriptor
First-level fetch concatenation and address
Table descriptors
Bits Section Coarse Fine Description
Section descriptor Format
Value Meaning Description
Fine page table
Section descriptor Bit description
Descriptor
Bits Description
113
Second-level descriptor pages
Second-level descriptor Second-level descriptor format
Second-level descriptor least significant bits
Second-level descriptor bit assignments
Bits Large Small Tiny Description
Translation sequence for large page references
Translating sequence for small page references
References
Translation Sequence for tiny
Level descriptor
More information
U Fault s a n d C P U a b o r t s
Domain Fault Address register
Priority encoding table Fault Address register FAR
FAR values for Multi-word
Transfers
Specifying access permissions
Compatibility issues
Interpreting access permission bits
M a i n a c c e s s c o n t r o l
Privileged permissions User permissions
Fault c h e c k i n g s e q u e n c e
No access 00 Reserved Check domain status
Fault checking sequence
A b l i n g a n d d i s a b l i n g t h e M M U
T e r n a l a b o r t s
Enabling
Disabling
B s t r u c t u r e
C h e s a n d w r i t e b u f f e r
Cache features
Write buffer Enabling the caches
Settings
Bit settings
R1 register C and M bits for DCache
DCache
Description ARM926EJ-S behavior Table C Table B Bit
C h e M V a a n d S e t / W a y f o r m a t s
Generic, virtually indexed, virtually addressed cache
Cache format
ARM926EJ-S
This figure
N c a c h a b l e i n s t r u c t i o n f e t c h e s
For example, with a 4-way cache a =
Self-modifying code
AHB behavior Instruction Memory Barrier
Sample IMB sequences
Noncachable instruction fetches
S i n t e r c o n n e c t i o n
Features
S t e m b u s a r b i t e r
Until the transaction completes
Ownership
Master will not occupy the system bus
Locked bus sequence Relinquishing the bus
Split transfers Arbiter configuration example
Address range Size System functions
D r e s s d e c o d i n g
O g r a m m a b l e t i m e r s
Software watchdog timer
Master Name Hmaster30 assignment
N e r a l p u r p o s e t i m e r s / c o u n t e r s
Gptc characteristics Control field
Source clock frequency
S i c P W M f u n c t i o n
Bit mode options
A d r a t u r e d e code r f u n c t i o n
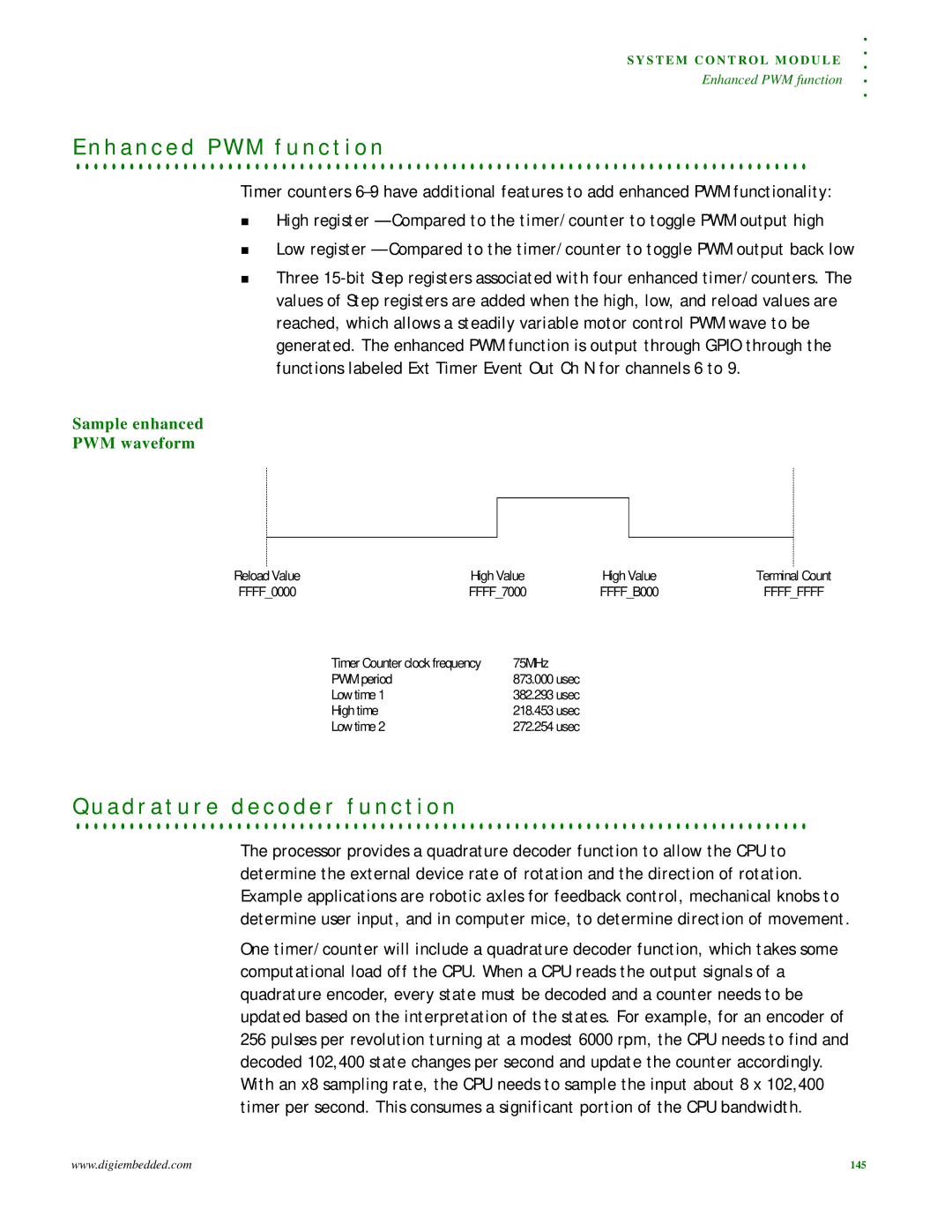
H a n c e d P W M f u n c t i o n
Sample enhanced PWM waveform
NC No change CW Clockwise CCW Counter clockwise Err Error
Input signals
Quadrature Encoding truth
CCW
Timer support
Testing signals
Monitors how far the encoder has moved Typical application
Digital filter
FIQ interrupts
T e r r u p t c o n t r o l l e r
IRQ interrupts
Vector
IRQ FIQ
IRQ characteristics Interrupt sources
Interrupt ID Interrupt source
Interrupt sources are assigned as shown
L c o n f i g u r a t i o n
N f i g u r a b l e s y s t e m a t t r i b u t e s
Configuring the powerup settings
PLL configuration and control system block diagram
O t s t r a p i n i t i a l i z a t i o n
Pin name Configuration bits
Offset 3124 2316 158
S t e m c o n f i g u r a t i o n r e g i s t e r s
155
Isaddr
System Memory Chip Select 0 Dynamic Memory Mask
C 0 , B R C 1 , B R C 2 , a n d B R C 3 r e g i s t e r s
N e r a l a r b i t e r C o n t r o l r e g i s t e r
Address A090
Register
Channel enable bit
B Error D e t e c t S t a t u s
Channel allocation Register Register bit assignment
This is how the channels are assigned in the four registers
EDS1
Address A090 001C
Not reset CPU data error
Not reset CPU instruction error
Not reset AHB error response
Transaction type write or read
AHB Slave Error Response Detect Config
AHB Error Interrupt Clear
M e r M a s t e r C o n t r o l r e g i s t e r
EIC
Timer 9 low step enable
Timer 9 reload step enable
Timer 9 high step enable
Timer 8 reload step enable
Addresses A090 0190 / 0194 / 0198 / 019C / 01A0
M e r 0 4 C o n t r o l r e g i s t e r s
Capture and compare mode functions
Timer enable
Debug mode
Timer clock select
Address A090 01A4
M e r 5 C o n t r o l r e g i s t e r
TM2
Reload mode
Addresses A090 01A8 / 01AC / 01B0 / 01B4
M e r 6 9 C o n t r o l r e g i s t e r s
D3118 Reserved D1716
M e r 6 9 H i g h r e g i s t e r s
M e r 6 9 L o w r e g i s t e r s
M e r 6 9 R e l o a d S t e p r e g i s t e r s
M e r 6 9 H i g h a n d L o w S t e p r e g i s t e r s
High step direction
High step
Reload step
Reload step direction
M e r 0 9 R e a d a n d C a p t u r e r e g i s t e r
Interrupt Vector Address register
Individual register mapping
Register 3124 2316 1508 0700
A D D R r e g i s t e r
Interrupt enable
Invert
Interrupt type
T e r r u p t S t a t u s a c t i v e
Interrupt service routine address
Interrupt status active
ISA
F t w a r e W a t c h d o g C o n f i g u r a t i o n
T e r r u p t S t a t u s R a w
Address A090 016C
Israw
Software watchdog timer clock select
Software watchdog enable
F t w a r e W a t c h d o g T i m e r
Software watchdog interrupt clear
O c k C o n f i g u r a t i o n r e g i s t e r
Watchdog timer
Address A090 017C
Max clock scale control
Clock scale control
CPU clock select
Memory clock out
IO hub
D u l e R e s e t r e g i s t e r
Ethernet MAC
Reset status
Module Reset register resets each module on the AHB bus
RST Stat
I2C
Miscellaneous System Configuration and Status register
Endian mode
Boot mode
Misaligned bus address response mode
Internal register access mode bit
PLL frequency formula Register Register bit assignment
L C o n f i g u r a t i o n r e g i s t e r
PLL bypass
Address A090 018C
W e r M a n a g e m e n t
Intid
Interrupt ID
New designs should not use this bit
Deprecated Chip sleep enable
Hardware clock scale control
Sdram self refresh control
RTC wakeup
CPU wake interrupt clear
I2C wakeup
SPI wakeup
Address A090 022C
B B u s a c t i v i t y S t a t u s
Addresses A090 01D0 / 01D4
Registers
Chip select 0 disable
Addresses A090 01D8 / 01DC
Chip select 0 base
Addresses A090 01E0 / 01E4
Chip select 1disable
Chip select 1 base
Addresses A090 01E8 / 01EC
Chip select 2 disable
Chip select 2 base
Addresses A090 01F0 / 01F4
Chip select 3 disable
Chip select 3 base
Chip select 0 mask
Addresses A09001F8 / 01FC
Addresses A090 0200
Chip select 1 disable
Addresses A090 0208 / 020C
N I D r e g i s t e r
STS
Genid
Status
CLR
C M o d u l e C o n t r o l r e g i s t e r
RTC standby mode status
RTC Module Control register controls the RTC module
Polarity
RTC clock ready interrupt status
RTC standby mode
RTC module interrupt status
RTC clock ready interrupt clear
RTC Module Control register
With and without asynchronous page mode
Memory controller provides these features
Static memory features, such as
Amba 32-bit AHB compliancy
W p o w e r o p e r a t i o n
M o r y m a p
Power-on reset memory map
Example Boot from flash Sdram remapped after boot
A t i c m e m o r y c o n t r o l l e r
Device Write protect Mode Buffer
ROM
Sram
Be aware
Write protection Extended wait transfers
A t i c m e m o r y i n i t i a l i z a t i o n
Access sequencing and memory width Wait state generation
Memory mapped peripherals
Output enable programmable delay
Programmable enable
A t i c m e m o r y r e a d c o n t r o l
ROM, SRAM, and Flash
External memory read transfer with two wait states
External memory read transfer with zero wait states
Timing parameter Value
WAITRD2 WAITOEN0 WAITPAGEN/A WAITWRN/A
WAITENN/A WAITTURNN/A
External memory read transfers with zero wait states
Burst of two wait states with fixed length
Burst of zero wait states with fixed length
Y n c h r o n o u s p a g e m o d e r e a d
External memory page mode read transfer
WAITRD2 WAITOEN0 WAITPAGE1 WAITWRN/A WAITWENN/A WAITTURNN/A
External memory 32-bit burst read from 8-bit memory
Timing parameters Value
WAITRD0 WAITOEN0 WAITPAGE0 WAITWRN/A WAITWENN/A WAITTURNN/A
A t i c m e m o r y w r i t e c o n t r o l
Write enable programming delay
Wait states added between external read and write transfers
External memory write transfer with zero wait states
External memory write transfer with two wait states
WAITRDN/A WAITOENN/A WAITPAGEN/A WAITWR0 WAITWEN0 WAITTURN0
S t u r n a r o u n d T i m i n g a n d p a r a m e t e r s
S t u r n a r o u n d
Read followed by write with no turnaround
WAITRD0 WAITOEN0 WAITPAGEN/A WAITWR0 WAITWEN0 WAITTURN0
Read followed by a write with two turnaround cycles
Write followed by a read with no turnaround
WAITRD0 WAITOEN0 WAITPAGEN/A WAITWR0 WAITWEN0 WAITTURN2
T e l a n e c o n t r o l
D r e s s c o n n e c t i v i t y
Memory banks constructed from 16-bit memory
Memory banks constructed from 16-or 32-bit memory devices
2Mx32 ROM
N a m i c m e m o r y c o n t r o l l e r
Access sequencing and memory width
R a M I n i t i a l i z a t i o n
Left-shift value -bit wide data bus Sdram RBC
Device size Configuration Load Mode register left shift
Bit Parameter Parameter description
256M 8M x 16M x 32M x 512M 64M x
Signal 16M device 64M device 128M 256M 512M
Bit wide Configuration
Device Signal
Left-shift value -bit wide data bus Sdram BRC
BA1
BA0
Register map
G i s t e r s
Only. Bursting is not allowed
Address Register Description
TRWL, tRDL
N t r o l r e g i s t e r
Reset values
Address A070
Low-power mode
Bits Access Mnemonic Description
Memory controller enable
Address mirror
N f i g u r a t i o n r e g i s t e r
A t u s r e g i s t e r
Self-refresh acknowledge Srefack
Write buffer status
END
N a m i c M e m o r y C o n t r o l r e g i s t e r
Dynamic memory clock enable
Sync/Flash reset/power down signal dypwrn
Sdram initialization
Self-refresh request Srefreq
Refresh
Refresh timer
Read data strategy
Active to precharge command period tRAS
Precharge command period tRP
RAS
Srex
Address A070 003C
Self-refresh exit time tSREX
APR
Last-data-out to active command time tAPR
DAL
Data-in to active command tDAL or tAPW
Address A070 004C
Active to active command period tRC
RFC
Auto-refresh period and auto-refresh to active command
Period
XSR
Exit self-refresh to active time command
RRD
Load mode register to Active Command Time
Active Bank a to Active Bank B
MRD
A t i c M e m o r y E x t e n d e d W a i t r e g i s t e r
External wait timeout
Example
Address A070 0100 / 0120 / 0140
Bdmc
Write protect
Address mapping
AM1
Address mapping
Memory Configuration
For the Dynamic
119 Description
For a chip select connected to Select this mapping
Address A070 0104 / 0124 / 0144
CAS
RAS latency active to read/write delay
CAS latency
Do not modify
Psmc
Buffer enable
Bsmc
Extended wait
Chip select polarity
Byte lane state
Mode
Bmode
Burst mode
Memory width
Wait output enable Waitoen
Wait write enable Waitwen
Address A070 0208 / 0228 / 0248
Wwen
Read first access wait state Waitrd
Nonpage mode read wait states or asynchronous page mode
A t i c M e m o r y R e a d D e l a y 0 3 r e g i s t e r s
Wtrd
Wtpg
Asynchronous page mode read after the first wait state
Wtwr
Address A070 0218 / 0238 / 0258
Write wait states Waitwr
Bus turnaround cycles Waitturn
Wttn
StaticMemory Turn Round Delay 0-3 registers
Ethernet Communication Module
Features Common acronyms
Ethernet communications module
H e r n e t M a C
Feature Description
MAC module block diagram Features
PHY interface mappings
A t i o n a d d r e s s l o g i c S a L
Station address logic
Media Independent Interface
MAC receiver
A t i s t i c s m o d u l e
Ethernet front- end module EFE
H e r n e t f r o n t e n d m o d u l e
Receive packet processor
Transmit packet processor
C e i v e p a c k e t p r o c e s s o r
Receive buffer descriptor format
Transferring a frame to system memory
Receive buffer descriptor format description
Receive buffer descriptor field definitions
A n s m i t p a c k e t p r o c e s s o r
Transmit buffer Descriptor field
Transmit buffer descriptor format
Definitions
Transmitting a frame
Transmitted
Frame
Successfully
Unsuccessfully
T e r r u p t s
H e r n e t s l a v e i n t e r f a c e
Interrupt condition Description
S e t s
Bit field Register Active Default Modules reset State
Status bits
Filter entries
L t i c a s t a d d r e s s f i l t e r i n g
Multicast address Filter registers
Multicast address filtering example
Multicast address
O c k s y n c h r o n i z a t i o n
Filtering example
Writing to other registers
Register address Filter
Eintr
Rxdptr
Eintren
Txptr
Address A060
H e r n e t G e n e r a l C o n t r o l R e g i s t e r #
Enable receive DMA
Enable RX packet processing
Enable TX packet processing
Accept short 64 receive frames
Enable initialization of RX buffer descriptors
Enable transmit DMA
Etxdma
Erxinit
RX Fifo RAM access
MAC host interface soft reset
Align RX data
Insert transmit source address
H e r n e t G e n e r a l S t a t u s r e g i s t e r
Rxinit
H e r n e t T r a n s m i t S t a t u s r e g i s t e r
RX initialization complete
Broadcast frame transmitted
Frame transmitted OK
Multicast frame transmitted
TX abort late collision
Address A060 001C
H e r n e t R e c e i v e S t a t u s r e g i s t e r
Receive frame OK
Receive frame size in bytes
Receive broadcast frame
Receive multicast frame
C C o n f i g u r a t i o n R e g i s t e r #
Bits Access Mnemonic Reset Definition
Receive enable
Internal loopback
Excess deferral
Vlan pad enable
Auto detect pad enable
Pad/CRC enable
CRC enable
PAD operation Table for transmit
C k t o B a c k I n t e r P a c k e t G a p r e g i s t e r
Frames
Type
Half-duplex mode
Full-duplex mode
Address A060 040C
Back-to-back inter-packet-gap
Address A060
L l i s i o n W i n d o w / R e t r y r e g i s t e r
IPGR1
Non back-to-back inter-packet-gap part
Cwin
X i m u m F r a m e r e g i s t e r
Collision window
Retx
Maximum frame length
Reset MII management block
Rmiim
I M a n a g e m e n t C o m m a n d r e g i s t e r
Clocks field Settings
Clock select
Suppress preamble
Register bit
I M a n a g e m e n t a d d r e s s r e g i s t e r
If both Scan and Read are set, Scan takes precedence
Automatically scan for read data
I M a n a g e m e n t R e a d D a t a r e g i s t e r
I M a n a g e m e n t W r i t e D a t a r e g i s t e r
Address A060 042C
MII read data
I M a n a g e m e n t I n d i c a t o r s r e g i s t e r
Miilf
MII link failure
Read data not valid
A t i o n a d d r e s s r e g i s t e r s
Nvalid
Automatically scan for read data in progress
Register bit assignments for all three registers
A t i o n a d d r e s s F i l t e r r e g i s t e r
Station Address Register #1
Station Address Register #2
PRO
G i s t e r H a s h T a b l e s
PRM
PRA
Address Register Transmit and receive counters
A t i s t i c s r e g i s t e r s
TR1K
Receive byte counter A060 069C
Receive statistics Counters address
Receive packet counter A060 06A0
Address Register Receive counters
Receive multicast packet counter A060 06A8
Receive FCS error counter A060 06A4
Receive broadcast packet counter A060 06AC
Rbuo
Receive code error counter A060 06C4
Receive alignment error counter A060 06BC
Receive carrier sense error counter A060 06C8
Receive undersize packet counter A060 06CC
Transmit statistics counters address map
Receive jabber counter A060 06D8
Transmit byte counter A060 06E0
Address Register Transmit counters
Transmit packet counter A060 06E4
Transmit excessive collision packet counter A060
Transmit undersize frame counter A060
Transmit oversize frame counter A060
These are the General Statistics registers
Carry Register
C1MGV
C1MAX
C1RBY
C1RPK
Mask register
M1RBY
M1MGV
M1RPK
M1RFC
Mask register Register
Address A060 073C
0x00000000 RXA Buffer Descriptor Pointer
Address A060 0A04
RXB Buffer Descriptor Pointer
Address A060 0A0C
Address A060 0A08
RXC Buffer Descriptor Pointer
RXD Buffer Descriptor Pointer
Address A060 0A10
H e r n e t I n t e r r u p t S t a t u s r e g i s t e r
Rxovflstat
Rxbufc
Rxdonec
Rxdoneb
Rxdoned
Rxnobuf
Address A060 0A14
H e r n e t I n t e r r u p t E n a b l e r e g i s t e r
Address A060 0A18
Address A060 0A20
Address A060 0A1C
Address A060 0A24
Address A060 0A28
Address A060 0A30
Address A060 0A2C
Address A060 0A38
Address A060 0A34
Address A060 0A3C
F r e e B u f f e r r e g i s t e r
Rxfreed
Rxfreec
L t i c a s t a d d r e s s F i l t e r r e g i s t e r s
Address A060 0A5C
Address A060 0A58
Address A060 0A60
Address A060 0A64
L t i c a s t a d d r e s s M a s k r e g i s t e r s
Address A060 0A94
Address A060 0A90
Address A060 0A98
Address A060 0A9C
Address A060 0AB8
Address A060 0AB4
Address A060 0ABC
Address A060 0AC0
Offset+0
B u f f e r D e s c r i p t o r R a M
Offset+8
Offset+4
Offset+C
Address A060 2000 512 locations
M p l e h a s h t a b l e code
Pointer to buffer to store hash table
Pointer to hash table
337
Sample hash table code
A t r a n s f e r s
External DMA
A b u f f e r d e s c r i p t o r
DMA buffer descriptor diagram
Source address pointer Buffer length
Destination
S c r i p t o r l i s t p r o c e s s i n g
R i p h e r a l D M a r e a d a c c e s s
Use this equation to compute total access time
Determining the width of Pden Equation variables
Variable Definition
Peripheral DMA burst read access
Peripheral DMA single read access
R i p h e r a l D M a w r i t e a c c e s s
REQ signal
Peripheral DMA burst write access
REQ signal
Logic remains paused until the REQ signal is reasserted
Static ram chip select configuration
Done signal Special circumstances
A t i c R a M c h i p s e l e c t c o n f i g u r a t i o n
Register name Field Value Comment
A B u f f e r D e s c r i p t o r P o i n t e r
A C o n t r o l r e g i s t e r
Channel go
Channel enable
Source width
Destination width
Destination burst
Fly-by mode
Source address increment
State
Reset
Index
Normal completion interrupt pending
Error completion interrupt pending
Buffer not ready interrupt pending
Channel abort interrupt pending
A P e r i p h e r a l C h i p S e l e c t r e g i s t e r
Chip select
SEL
DMA Peripheral Chip Select register
Processes 32 bits at a time
AES
Is programmable for 128-, 192-, or 256-bit key lengths
Supports ECB, CBC, OFB, CTR, and CCM cipher modes
Key size Characteristic 128 192 256
Block diagram
S D M a b u f f e r d e s c r i p t o r
Data blocks
Source address pointer
AES buffer descriptor diagram
Source buffer length
Destination buffer length
Interrupt I bit Last L bit Full F bit
AES op code
B p r o c e s s i n g
C r y p t i o n
C , C F B , O F B , a n d C T R p r o c e s s i n g
CCM mode does not require an initialization vector
M m o d e
Nonce buffer
Contents
Bits
CCM mode
Hub Module
AHB slave
A c o n t r o l l e r
Interface
Servicing RX and FIFOs
Control14
Source address pointer Buffer length Control15 W
Control13 L
Control12 F
Status150
Control110
Not applicable
A n s m i t D M a e x a m p l e
Process
Pointer and Index
System Memory
Visual example
Uart a register Address map
Reserved
Uart B register Address map
Register Offset Description
Uart D register Address map
Uart C register Address map
AD register Address map
SPI register Address map
Reserved
I2C register Address map
IO Hardware Assist register
RTC register Address map
IO register Address map
Normal completion interrupt pending RX
Error completion interrupt pending RX
Buffer not ready interrupt pending RX
Channel abort interrupt pending RX
Error completion interrupt pending TX
RX Fifo service request interrupt pending
TX Fifo service request interrupt pending
RX Fifo overflow interrupt pending
D u l e D M a R X C o n t r o l
Flex I/O
Channel abort
Direct
Rxthrs
Rxbdp
RX Fifo threshold
D u l e D i r e c t M o d e R X S t a t u s F I F O
Full flag
D u l e D i r e c t M o d e R X D a t a F I F O
Indexen
D u l e D M a T X C o n t r o l
Txbdp
TX Fifo threshold
D u l e D i r e c t M o d e T X D a t a F I F O
TXD
D u l e D i r e c t M o d e T X D a t a L a s t F I F O
Txdl
384
Receive error conditions
Modem control signal support
Character gap timeout
DMA transfers to and from system memory
R m a l m o d e o p e r a t i o n
Example configuration
Uart module structure
Control register Field Value Comment
Baud rates
U d r a t e g e n e r a t o r
This table shows the baud rates achieved with CLKref set to
Divisor Baud rate
R c e d c h a r a c t e r t r a n s m i s s i o n
R d w a r e b a s e d f l o w c o n t r o l
M w a k e u p o n c h a r a c t e r r e c o g n i t i o n
Force character transmission procedure Collecting feedback
Address Register
A p p e r C o n t r o l a n d S t a t u s r e g i s t e r s
DLAB=0
DLAB=1
Rtsen
A p p e r C o n f i g u r a t i o n r e g i s t e r
RTS
Dtren
Receive character-based flow control
Software
Remote loopback
RTS control
T e r r u p t E n a b l e r e g i s t e r
Enable force complete
RS485 transceiver deassertion control
RS485 transceiver assertion control
Enable parity error
Enable overflow error
Enable frame error
Enable line break
T e r r u p t S t a t u s r e g i s t e r
Frame error
Parity error
Uart interrupt
Force complete
Character match3
Ring indicator
Character match2
Character match1
Transmit idle
Enable receive character gap timer
Receive idle
Write this field to
C e i v e B u f f e r G a P C o n t r o l r e g i s t e r
Enable transmit bit rate generation
Mask
Enable character match
Data
Flowstate
Flow control enable
Flow control state
FLOW4
FLOW2
M W a k e u p C o n t r o l r e g i s t e r
Force transmit enable
Read-only busy
Char
A n s m i t B y t e C o u n t
Enable
Address 90011034 / 90019034 / 90021034
Txcount
R T T r a n s m i t B u f f e r
R T R e c e i v e B u f f e r
Rbuff
R T B a u d R a t e D i v i s o r M S B
R T B a u d R a t e D i v i s o r L S B
Tbuff
Brdl
R T I n t e r r u p t E n a b l e r e g i s t e r
Enables modem status interrupt
Brdm
Edssi
Enables transmit holding register empty interrupt
Enables receive line status interrupt
Enables receive data available interrupt
Interrupt identification
R T F I F O C o n t r o l r e g i s t e r
Enable the TX and RX Fifo
R T L i n e C o n t r o l r e g i s t e r
Clear all bytes in the TX Fifo
Parity enable
Divisor latch access bit
Set break, if set TX data is set to
Stick parity, operates as follows
R T M o d e m C o n t r o l r e g i s t e r
Local loopback enable bit
R T L i n e S t a t u s r e g i s t e r
Automatic flow control
R T M o d e m S t a t u s r e g i s t e r
Trailing edge of RI indicator
Delta DCD indicator
Delta DSR indicator
Delta CTS indicator
Uart Modem Status register
Hdlc module structure
C e i v e a n d t r a n s m i t o p e r a t i o n s
T s
O c k i n g
Transmit operation
Transmitter underflow
Last byte bit Pattern table
T a e n c o d i n g
Encoding examples
Last byte bit pattern Valid data
Transitions
Dpll operation Adjustment ranges and output clocks
NRZ and Nrzi encoding Biphase-Level encoding
CLK
Address
Received or a buffer close event occurs, such as end
Enable invalid CRC
Enable Hdlc interrupt
Enable valid CRC
Local loopback
Rabort
Enable receive abort error
Hdlc interrupt
Receive abort error
Invalid CRC
Valid CRC
Hdata
L C D a t a R e g i s t e r
Hdata
Hmode
L C C o n t r o l R e g i s t e r
Clock source
L C C l o c k D i v i d e r L o w
Address 9002911C
L C C l o c k D i v i d e r H i g h
Divl
Divh
Clock enable
Programmable SPI mode 0, 1, 2, or
Four-wire interface RXD, TXD, CLK, CS
Master mode internal diagnostic loopback
Interface SPI module
SPI module structure
I c o n t r o l l e r
SPI mode SPI CLK Idle
Timing modes Clocking mode diagrams
I c l o c k i n g m o d e s
Capture edge Drive edge
I c l o c k g e n e r a t i o n
SPI master mode SPI slave mode
S t e m b o o t o v e r S P I o p e r a t i o n
Clock generation samples
Available Strapping options
Bootmode10 Address width
EEPROM/FLASH header
Entry Name
Entry Name Description
Time to completion
This is the primary SPI Configuration register
Configuration registers for the SPI module are located at
Enable master loopback mode
I C o n t r o l a n d S t a t u s r e g i s t e r s
Slave enable
SPI mode
O c k G e n e r a t i o n r e g i s t e r
Discard bytes
Enable clock generation
Bits Access Mnemonic Reset Divisor
Register programming steps
Use this register to define the data rate of the interface
D3102 Not used Write this field to D01
SPI master timing Parameters
I t i m i n g c h a r a c t e r i s t i c s
Parm Description Min Max Unit
SPI master timing diagram SPI slave timing parameters
SPI slave timing diagram
SPI timing characteristics
Y s i c a l I 2 C b u s
Interface timing, data structure, and error handling
I2C bus
Overview
Slave Description Addres Bit
E x t e r n a l a d d r e s s e s
C o m m a n d i n t e r f a c e
Command Name Description
M m a n d T r a n s m i t D a t a r e g i s t e r
R e g i s t e r s
Address 9005
RegisterDescription
2C Dlen port iicdlen
A t u s R e c e i v e D a t a r e g i s t e r
Provide new transmit data
Scmdl
S t e r a d d r e s s r e g i s t e r
Mcmdl
Irqcd
A v e a d d r e s s r e g i s t e r
Timing parameter for fast-mode Register
Address 9005 000C
Mask the interrupt to the ARM CPU irqdis
Master/slave interrupt codes
T e r r u p t codes
Code Name Master/slave Description
I2C master software driver I2C slave high level driver
F t w a r e d r i v e r
Master module normal mode, 16- bit
O w c h a r t s
Slave module normal mode, 16- bit
Real Time Clock Module
Address 9006
C G e n e r a l C o n t r o l r e g i s t e r
2 4 H o u r r e g i s t e r
12/24 clock mode operation
Calendar operation
Time date, hour, minute, second operation
HRT
M e r e g i s t e r
HRU
Address 9006 000C
L e n d a r r e g i s t e r
M e Alarm r e g i s t e r
Alarm E n a b l e r e g i s t e r
L e n d a r Alarm r e g i s t e r
Address 9006 001C
E n t F l a g s r e g i s t e r
Month event
Alarm event
Date event
Hour event
Month interrupt
Alarm interrupt
Date interrupt
Hour interrupt
T e r r u p t D i s a b l e r e g i s t e r
T e r r u p t E n a b l e S t a t u s r e g i s t e r
Address 9006 002C
N e r a l S t a t u s r e g i s t e r
General Status register
Structure
ADC module
ADC control block
C D M a p r o c e d u r e
C c o n t r o l a n d s t a t u s r e g i s t e r s
ADC configuration registers are located at offset
C C o n f i g u r a t i o n r e g i s t e r
Interrupt status
DMA enable
ADC channel select
C O u t p u t R e g i s t e r s 0
C C l o c k C o n f i g u r a t i o n r e g i s t e r
Wait
Dout
E c t r i c a l c h a r a c t e r i s t i c s
Parameter Symbola Rating Unit
Absolute maximum ratings
CPU / Memory clock Power
Parameter Symbol a Rating Unit
Recommended operating conditions
Inputs
E l e c t r i c a l c h a r a c t e r i s t i c s
Sym Parameter Conditiona Value Unit
Sym Parameter Value Unit
Ouputs
NC7SP17
Manufacturer Part Number Description
74LVC1G17GW
SN74LVC1G17DC
M o r y T i m i n g
Sdram burst read 16-bit
Sdram burst read 16 bit, CAS latency =
Sdram burst write 16 bit
Sdram burst read 32 bit
Sdram burst read 32 bit, CAS latency =
Sdram burst write 32-bit
Sdram load mode
Sdram refresh mode
Clock enable timing
Parm Description Min Max Unit
Static RAM read cycles with 0 wait states
Static RAM asynchronous page mode read, Wtpg =
Static RAM read cycle with configurable wait states
Static RAM sequential write cycles
Static RAM write cycle
Static write cycle with configurable wait states
CPU
Slow peripheral acknowledge timing
Slow peripheral acknowledge write
Slow peripheral acknowledge read
Ethernet MII timing
Ethernet timing
I2C timing
Standard Mode Fast Mode Parm Description Min Max Unit
Parm Description Min Max Unit Mod Not
SPI Timing
SPI master parameters
SPI slave parameters
Tbclk *8
SPI master mode2 and 3 2-byte transfer
SPI master mode 0 and 1 2-byte transfer
SPI slave mode 2 and 3 2-byte transfer
SPI slave mode 0 and 1 2-byte transfer
Parm Description Min Typ Unit
S e t a n d h a r d w a r e s t r a p p i n g t i m i n g
A G t i m i n g
O c k t i m i n g
Diagram below pertains to clock timing
System PLL reference clock Timing
Clock timing
C k a g e
Packaging
O c e s s o r D i m e n s i o n s
C K a G I N G
Processor Dimensions
V i s i o n C
V i s i o n B