Peripheral Units
Connection
Basic Parameters Extended
Precautions
Symbols Meaning
Limited applications
Marking
Handling in general
Transportation・Installation
Wiring
About operation
When selecting the retry mode Applicable to inverters
About inspection and maintenance
About disposal of inverters
Sticking warning labels
Features
Ⅱ. Preface
Type Form Specification code
200V-3.7kW
Package Name plate
Special
Panel description
Indication alphabet
Panel indication
Indication number
Page
VFA7-2300P, 4300P VFA7-4370P1~4550P1
VFA7-2185P, 2220P VFA7-4185P, 4220P
Grounding terminal
Page
Page
Detaching the terminal board front cover
P24
Comparison with commercial power operation
Adjustment of overload protection level
Operation in low speed ranges
High-speed operation at a frequency of 60 Hz or over
Motor with a braking system
Braking of a motor after power shutoff
Load producing negative torque
Power factor improving capacitor
Over-current protective function
Inverter capacity
Use of an inverter at a voltage other than the rated one
Measures to be taken
Power supply Inverter
Influences of leakage currents and measures against it
Power supply
Installation environment
Resistor
Installation
Installation place
For closed-type
Applicable Calorific value
Heat radiation area Required Motor Inverter
Page
Heat-sink going out attachmentsimple type
Normal attachment Heat-sink going out attachment Simple type
Connection
Inverter, or the inverter could cause a shock or a fire
Prevention of radio noise
Standard connection diagram for sink logicminus common
Standard connection
Motor Main circuit
Control panel
Control Circuit
Control
*1 R20
R20 R46
R46 R41
Explanation of terminals
Main circuit terminals
Terminal symbol
Inverter internal circuit
R0, S0 R46, R41, R20, S20
R20 S20 P0, PA, PB, PC, PA1,PB1,PR1
Control circuit terminals sink logicminus common
Output Default setting Operation frequency command
Output Default setting Output current. Connect a 1mAdc
Input Function Electrical Inverter internal
Connect a 1mAdc full-scale ammeter or a
Switching logic
Input Common P24 Output Common CC
Common Input
Common Programmable Inverter Controller
Serial RS485 communication connector
Motor is at a standstill, or you could get a shock
Could get a shock
Control modes of the VF-A7 inverter
Sensor vector control Optional
Example of typical connection
Simple operation of the VF-A7 1 Speed control mode
1Operation from the terminalexternal signals
Frequency setting
Speed setting mode selection parameter at
)Setting the frequency by voltage signals 0 to 10
)Setting the frequency by a current signal 4 to 20 mA
Speed setting mode selection parameter at
)Setting the frequency by voltage signals 0 to 10 Vdc
)Setting the frequency by voltage signals 0 to +/-10Vdc
Operation from the control panel [Control panel operation]
:Start the motor
Selecting a stop mode with the control panel
Example of control panel operation
Simple operation of the VF-A7 2 Torque control mode
Setting a control mode
S4 Control mode Switching RR switching
When the motor is out of operation. If the monitor display
Mode setting parameter is set at Running
Polarity of torque command
Operation from the terminalexternal signal
Torque command
Torque control mode
Start/stop
Torque setting by means of current signals 4 to 20 mAdc
Torque setting by means of voltage signals 0~10 Vdc
)Torque setting by means of voltage signals 0~10 Vdc
)Torque setting by means of a volume control
Others
Setting the start and stop modes
Selecting a torque command mode
Torque command
Operation from the control panel
Set the torque command
Example of control panel operation
RUN :Starts the motor
Stop :Stops the motor
Setting parameters Setting monitor mode
Speed control mode
Torque control mode
Status monitor mode Setting monitor mode
How to set basic parameters Basic parameter
Procedure for setting a basic parameter
Basic parameter list
How to set extended parameters
Procedure for setting an extended parameter
Example of parameter setting
When the motor is out of operation.If the monitor
Display mode setting parameter is set at
Running frequency
Searching for a parameter and changing its setting
Parameters that cannot be changed during operation
Basic parameters
FM terminal meter selection FM terminal meter adjustment
AM terminal meter adjustment
Optional analog terminal #1 meter adjustment
Optional analog terminal #2 meter adjustment
Setting the acceleration and deceleration times
Automatic acceleration/deceleration
=
・ Function
Manually setting the acceleration and deceleration times
Change the parameter setting to automatic
Acceleration/deceleration enabled by pressing key
Time s
Increasing starting torque/ energy-saving operation mode
:Automatic V/f mode setting
If you fail to make the setting for vector control
VF-A7 inverter has been set to this control mode by default
Selecting an operation mode
Preset speed operation
Operation command
Mode selection
Speed setting mode
Title Function Set value
Panel stop pattern
Speed setting
Setting and calibrating meters
Title Function Adjustment range
・Function
Terminal FM-related parameters
Resolution
Calibrating a meter when the inverter is out of operation
By setup, before the needle of meter begins to sway
Return the parameter setting to output current display
Frequency display mode.If the monitor display mode setting
Set the parameter at fixed output for meter
Factory default setting
:Standard setting mode selection
Hz standard setting =
Hz standard setting =
Factory default setting =
Reset of user-defined parameters =
Trip clear =
Clearing accumulating operation time =
Parameter setting
Maximum frequency
:Forward/reverse selection
:Maximum frequency
Upper and lower limit frequencies
Base frequency
:Upper limit frequency :Lower limit frequency
:Base frequency #1
Control mode selection
:Motor control mode selection
Constant torque characteristic Normal way of use
Motor control
Setting suitable for fans and pumps
:The torque Boost rate is adjusted
To increase the starting torque
Automatically
Control by pressing the key
Value. Default setting Constant torque
Change the parameter setting to Sensorless vector
To set the V/F characteristic arbitrarily
5-point setting
※100% adjustment value 200V class 200V,400V class
This control mode involves the setting of the motor constant
Switching between speed control and torque control
: Motor control mode selection
Speed setting
~
Torque reference
Common serial communication option
Communication add-on cassette option
Binary/BCD inputoptional
Setting the electronic thermal protective function
Parameter Title Function Adjustment range
Manual boost ~ %
Setting the electronic thermal protective function
Setting the motor overload protection level #1
Explanation of terms
Overload stallSoft stall
×1.0 ×0.6
Setting of motor overload start level
Overload reduction start-up ~ Hz
Motor 150%-overload time limit
Inverter overload characteristic
Inverters overload protective characteristic
Start/stop
Preset-speed operation 15 speeds
Setting preset-speed frequencies
Forward run command
Reverse run command
Preset-speed #1
Preset-speed #2
Setting the operation mode
Frequency signals
Low-speed signal
・Output terminal setting
・Function
P24-OUT2
Putting out signals of arbitrary frequencies
・Function
Selection of input signals
Changing standby signal function
Standard
Always-ON
[ Disabled Terminal board has no priority ]
Forward
Reverse
=Stop
Setting value Jog run
Priority command from terminal board Operation command
terminal board has priority Enabled
Binary/BCD signal selectionExpansion TB option unit
:Binary/BCD signal selectionExpansion TB option unit
Forced JOG forward rotation
Input terminal selection #8S4
Signal on completion of acceleration/deceleration OUT
Selection of terminal functions
Keeping an input terminal function always active on
Changing input terminal functions
Changing output terminal functions
Response times of input/output terminals
Refer to 7.2.2 for details
Refer to 7.2.3 for details
Basic parameters #2
Setting of switching terminals
S1:V/f switching #1 S2:V/f switching #2
S1V/f switching #1 S2V/f switching #2 Parameters selected
OFF
Speed/torque command gain and bias
Using two types of frequency speed commands
has priority
has priority
Command selected with
Frequency reference
Setting frequency command characteristics
Setting torque reference characteristics
Operating by means of reference signals
Operation frequency
Start-up frequency and End frequency
3 0Hz dead band frequency
DC injection braking
DC injection braking
Motor shaft fixing control
:Motor shaft fixing control
Braking under normal conditions
Forward/reverse DC braking priority control =OFF
Zero-speed stop mode selection
:Zero-speed stop mode selection
LED display lights lights
~ Hz
Jog run
:Jog run frequency :Jog stop control
~ Hz
Example of jog run
Preset-speed #8~15
~ :Preset-speed #8~#15
Jump frequency Jumping resonant frequencies
Refer to 5.14 for details
PWM carrier frequency
Trip-less enhancement
:PWM carrier frequency
Set the mode of Auto-restart
Restart after a momentary power failure
Set the control method of Auto-restart
Restart of coasting motor Motor speed search function
1Case =
Adaptation for elevator applications
Regenerative power ride-through control / Deceleration stop
Set the property of Auto-restart
Case =
Case =~
Retry function
:Retry selection
Dynamic regenerative braking To urgently stop the motor
An internal braking resistor for 3.7kW model and smaller
Dynamic braking resistor capacity
~ Ω
An external braking resistor optional
Any value
Class Capacity kW
120W 70Ω 200 120W 40Ω 400 120W 150Ω 100
When using a braking resistor without thermal fuse
PBR resistor capacity
Supply
~ Ω Any value
Type
Selection of braking resistor option and braking unit
Connectable braking resistors and their minimum resistances
Adjusting the output voltage and voltage compensation
Avoiding over-voltage trip
Prohibiting the reverse operation
:Reverse-run prohibition
Drooping control
Drooping Gain
Dead band Frequency
Speed at the drooping gain ~ Hz
Commercial power/inverter switching
Function for crane/hoist
Timing chart
Speed feedback/positioning control
~ :Preset speed operation modes
PID control
Setting motor constants
Selection 1 Setting by the automatic V/f mode
Set the auto-tuning = Automatic tuning execution
Refer to 5.2 for details of this setting
Setting parameter is set at Running frequency
Change the parameter setting to Automatic tuning
Motor is out of operation. If the monitor display momde
Press the Enter key to activate the parameter
Setting the rating of the motor
Setting motor constants
①Slip frequency gain
Examples of setting auto-tuning
Inverter VFA7 2037PL Motor 7kW, 4P, 60Hz Selection
Torque control
Torque reference
~20mAdc ⇒ II terminal
~10Vdc ⇒ RR terminal
Voltage signal 0 ~± 10Vdc
Torque reference filter
:Torque reference filter
⇒ RX terminal
Speed limits in torque control mode
Setting with the control panel
Setting of forward speed limit level
Setting of reverse speed limit level
Setting by means of external signals
Selection of external signals
Torque bias and load sharing gain
―― 40 ~20mA
Voltage signals Current signals
× +
Setting
Power running /regenerative torque limit
Setting of power running torque
Setting of regenerative torque
Limiting the torque with external signals
Regenerative Power running
Power running Regenerative
Positive/negative torque limits
Torque Limit #1
Negative torque limit
RRvolume/ voltage
Positive torque limit
Torque Limit
Selection Regenerative
Slowly in weak-field areas where it
Secondary acceleration/deceleration
Motor needs to be speeded up to
Suitable for the operation
Switching of acceleration/deceleration #1, 2, 3
Selection with parameters
Output freq. Hz Setting freq
Acc/dec switching #1 Acc/dec switching #2
Parameter setting
Minimum acceleration/deceleration times
Acceleration/deceleration patterns
:Acceleration/deceleration lower limit
Pattern run
~
<Basic operating>
Monitor displayed during pattern run
Output frequency Hz Setting frequency Step trigger signal
④ :select pattern group #4 Parameter setting
Motor over road protection-level adjust / motor types
Setting of current stall
Protection functions
Inverter trip holding
Emergency stop
Overload reduction start-up frequency
Motors 150%-overload time limit
Emergency stop by terminal operation
Over-torque trip
Detection of output phase failure
Action at low currents
Cooling fan control mode selection
Cumulative operation time alarm
:Cooling fan control mode
:Cumulative operation time alarm setting
System-supporting sequence B-timer
Over-voltage stall protection level
Under-voltage trip
UV stall level
Special analog input
Over-ride
Additive over-ride
Output frequency = Reference + Over-ride VI input Hz
Output frequency = Reference + Over-rideVI input Hz
Output frequency = Reference × 1 + Over-rideVI input %
Output frequency = Reference × 1 + Over-ride %
Setting of meter outputs
Setting of optional meter outputs
Meter output
Pulse output to meters
Prohibiting the change of parameter settings
:Prohibition of parameter setting
:Current / voltage display mode
Control panel parameters
Display the motor speed and the load speed
:Frequency free unit magnification
Display of the rotating speed of the motor
Display of the speed of the load
Changing items displayed in status monitor mode
Switching basic parameters
:Selection of panel V/f1, 2, 3 or
Time 0.01 s
Resetting the inverter from the control panel
Panel reset function
Selecting a control panel stop pattern
:Panel stop pattern
Canceling PID control in panel operation mode
Setting a torque command in panel operation mode
Drooping control in panel operation mode
Override in panel operation mode
Setting
Canceling methods
Restricting or prohibiting key operation
:Panel operation prohibition
Communication function RS485/common serial
Common serial optional device
<Computer link>
<Inter-drive communication>
Setting of operation command common serial
Operation command ~ Mode selection
Terminal block enabled
Using the RS485 port fitted as standard
Inter-drive communications
:Wiring :Data (Host→Inverter)
:Wiring :Data (Master→slave)
Setting of operation command RS485
Setting of speed reference RS485
Operation with External Signal
External Operation
Setting of contact input terminal function
Functions of input terminals in case of sink logic
Control terminal board
Connection method
Inverter
Example of use Push-type operation stop
Acc/dec, V/f, torque limit #3
Table of contact input terminal function settings
Acc/dec, V/f, torque limit #2
Setting of output terminal functions
Symbol Title Function Adjustment Default setting
Low speed signal
Functions of output terminals in case of sink logic
Parameter setting
OFF All the alarms above are cancelled
Or detected
Output of the designated data in 7 bits
Over travel On Over running
Completion of positioning On Positioning has been completed
OFF in positive logic
Setup of input/output terminal operation time
Setup of response time
Response time setting
Analog input filter
Control terminal board
Setup of external speed command analog signal
Setting of analog input terminal functions
~
Setup by analog input signals RR terminal
Title Function Adjustment range
Setup by analog input signals VI/II terminal
10V VI terminal
Setup by analog input signals RX terminal
Status monitor mode
Status monitor
Information on input terminals
Information on output terminals
Type of connected option
Total accumulated operation hours
Changing status monitor function
Changing indication of status with power on
Changing contents of status monitor indication
1kW
FE30 Output power
01kW
Indication in trip status
Details of indications of trip status
Examples of reading out trip data
Indication of alarm, pre-alarm, etc
Selection of wiring equipment
Failure, short-circuit or electric leak
Selection of wiring equipment
Inverter model
Installation of electromagnetic contactor
Electromagnetic contactor in the primary circuit
Installation of overload relay
Electromagnetic contactor in the secondary circuit
VF-A7
Application and functions of options
Sorts of separate-type options
Motor end surge
RS-232C ⑬ communication converter unit Model RS2001Z
RS-232C Communication Converter cable
Selection table of separate-type options
Optional add-on cassettes
Table of optional add-on cassettes
Functions of optional add-on cassettes
Table of optional add-on cassettes
* In a set with SBP002Z
②Expansion TB option unit
* In a set with SBP001Z
Installation of board option
Board options
Table of board options
Functions of board options
Mandatory
Before installing optional add-on cassette or board option
Case
Case 2-A. When PG feedback function is used
Prepare for installing according to 9.7.1, 1 to
Case 2-B. When PG feedback function is mot used
Preparation is not needed
Basic parameters 1/2
Basic parameters 2/2
Frequency signal
Input signal selection
Extended parameters
Terminal function selection 1/2
Terminal response time setup
Terminal function selection 2/2
Point Setting
Basic parameters #2
Speed/torque reference gain/bias setup 1/2
Speed/torque reference gain/bias setup 2/2
Operation frequency
Braking
Operation
Preset speed operation frequency 8- to 15-stage speed
Tripless intensification setup 1/2
Jumper frequency
PWM carrier frequency
For lift 1/2
Tripless intensification setup 2/2
Control
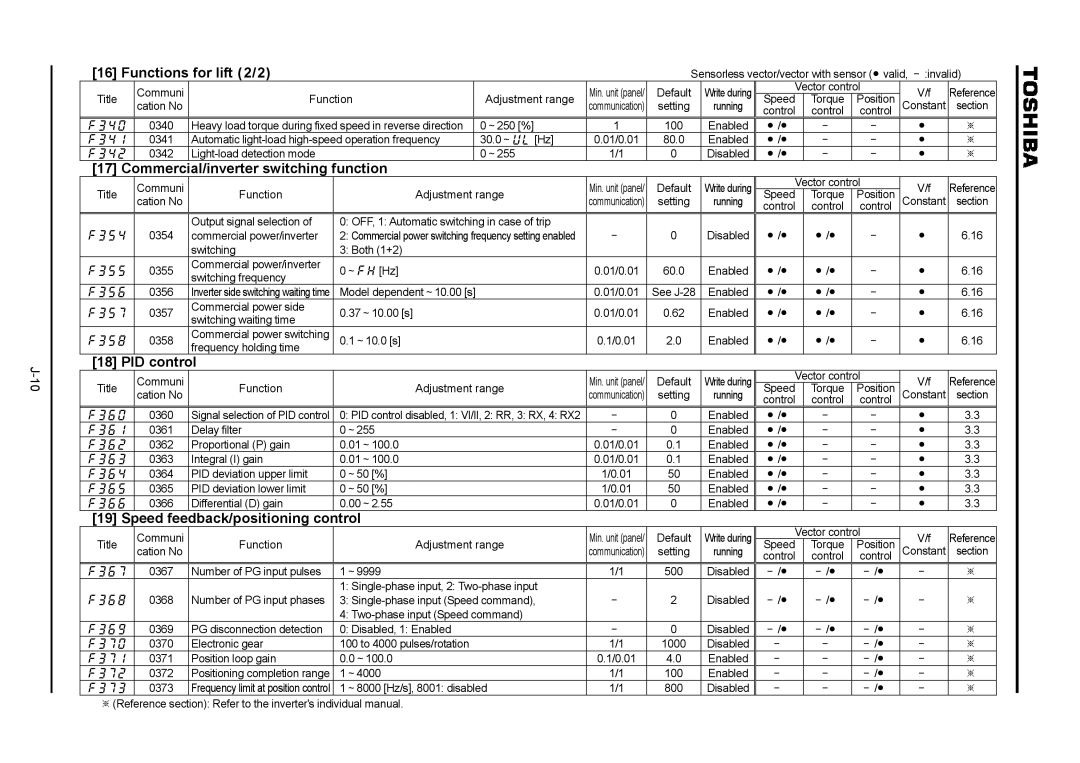
Commercial/inverter switching function
Functions for lift 2/2
PID control
Speed feedback/positioning control
Preset-speed operation mode
Vector control
Motor constant
Torque control
Speed/torque reference gain/bias setup #21/2
Torque limit
Speed/torque reference gain/bias setup #22/2
Secondary acceleration/deceleration
Pattern run selection Disabled, 1 Enabled
Pattern run mode Patterned operation canceled during stop
Preset-speed #1 operation
Continuation mode
Preset-speed #1 operation time ~8000 s / min
Preset-speed #2 operation time Ditto
Protection functions
Meter output 1/2
Special analog input
Over-ride
Meter output 2/2
Control Panel parameters
Communication function1/2
Communication function2/2
Reservation area
[Contents of monitor indications]
Monitor FM/AM/pulse output function selection
Input terminal function setting 1/2
[Input terminal function setting 2/2]
= = =~ =
104 105
106 107 VI/II terminal priority 108 109
[Output terminal function setting 1/2]
[Output terminal function setting 2/2]
Default settings
PWM
Standard specifications by types
Standard specifications by types large capacity types
Common specifications
Fault
Process, upper/lower limits
Causes
Digit
External dimensions and mass
External dimensions and mass
Outline drawings
Drawing a Drawing B
Drawing C Drawing D
Drawing E Drawing F
Dimensions for heat-sink going out attachmentsimple type
Indication Contents Expected causes Countermeasures
・ Decrease setting value
Also reset the
・ Extend acceleration time #1
・ Reset the inverter
Initial read-error
Main RAM fault
Main ROM fault
Presence or absence of parameter trip can be selected
・ If undervoltage is detected, set
Setting signal apart from each
Method of resetting causes of trip
~ Caution! ~
Is input power Input power Correct?
Make a service call
Is LED on
RUN/STOP key
How to check other troubles
Measures against trouble with parameter setting
Regular inspection
Check points
Inspection method
By feel touch
Dealer for replacement of part
Periodical inspection
Points of inspection
・Dont replace any component part
Replacement of expendable parts
Standard period of years to replace main component parts
When making a service call
When retaining the inverter out of operation
Warranty
Disposing manner
Blasting during incineration
Plastics