82540EP/EM, 82541xx, 82544GC/EI, 82545GM/EM, 82546GB/EB,
Software Developer’s Manual
Date Version Comments
Initial Public Release
Software Developer’s Manual
Contents
TCP Segmentation Use of Multiple Data Descriptors
Software Developer’s Manual Vii
Power Management 129 Introduction to Power Management
10.1.3
203
13.4.25
13.7.10
Appendix 82540EP/EM and 82545GM/EM Differences
Xiv
Scope
Overview
Ethernet Controller Features
PCI Features
CSA Features 82547GI/EI Only
Network Side Features
Host Offloading Features
Additional Performance Features
Additional Ethernet Controller Features
Technology Features
Conventions
Related Documents
Memory Alignment Terminology
Register and Bit References
Architectural Overview
Introduction
PHY
External Architecture
LAN a LAN B
ECHO, Next Fext
Eeprom Flash
AGC, A/D
Microarchitecture
1 PCI/PCI-X Core Interface
2 82547GI/EI CSA Interface
DMA Engine and Data Fifo
4 10/100/1000 Mb/s Receive and Transmit MAC Blocks
5 MII/GMII/TBI/Internal SerDes Interface Block
6 10/100/1000 Ethernet Transceiver PHY
Eeprom Interface
DMA Addressing
Flash Memory Interface
Example 2-1. Byte Ordering
Little Endian Data Ordering
Intel Architecture Byte Ordering
Ethernet Addressing
IA Byte # LSB MSB
Interrupts
Hardware Acceleration Capability
Buffer and Descriptor Structure
Checksum Offloading
TCP Segmentation
Architectural Overview
Packet Reception
Introduction
Packet Address Filtering
Receive Descriptor Format
Receive Data Storage
Receive Descriptor Rdesc Layout
Receive Descriptor Status Field
Receive Status RDESC.STATUS Layout
PIF Ipcs Tcpcs RSV Ixsm EOP
Receive
Receive Descriptor Errors Field
Receive Errors RDESC.ERRORS Layout
RXE IPE Tcpe RSV
RSV SEQ
CXE
Receive Descriptor Special Field
Special Descriptor Field Layout
PRI CFI Vlan
PRI
Receive Descriptor Fetching
Receive Descriptor Fetching Algorithm
Receive Descriptor Write-Back
Receive Descriptor Queue Structure
Receive Descriptor Packing
Null Descriptor Padding
Receive Descriptor Ring Structure
Receive Interrupt Delay Timer / Packet Timer Rdtr
Receive Timer Interrupt
Receive Interrupts
Receive Interrupt Absolute Delay Timer Radv
Packet Delay Timer Operation State Diagram
Small Receive Packet Detect
8 82544GC/EI Receive Interrupts
Receive Packet Checksum Offloading
Receive Descriptor Minimum Threshold ICR.RXDMT
Receiver Fifo Overrun
Supported Receive Checksum Capabilities
Packet Type HW IP Checksum HW TCP/UDP Checksum Calculation
MAC Address Filter
GC/EI Supported Receive Checksum Capabilities
Packet Type HW IP Checksum HW TCP/UDP Checksum
Packet Type HW IP Checksum
Packet Transmission
SNAP/VLAN Filter
9.3 IPv4 Filter
9.4 IPv6 Filter
Transmit Data Storage
Transmit Descriptors
Transmit Descriptor Tdesc Layout Legacy Mode
Legacy Transmit Descriptor Format
Transmit Descriptor Tdesc Layout
Transmit Descriptor Legacy Descriptions
Transmit Descriptor Description Legacy
CMD
STA
CSS
Transmit Descriptor Command Field Format
10. Transmit Command TDESC.CMD Layout
IDE VLE Dext RSV
Ifcs EOP
Transmit Descriptor Status Field Format
11. Transmit Status Layout
Transmit Descriptor Special Field Format
12. Special Field TDESC.SPECIAL Layout
5 TCP/IP Context Transmit Descriptor Format
6 TCP/IP Context Descriptor Layout
13. Transmit Descriptor Tdesc Layout Type = 0000b
14. Transmit Descriptor Tdesc Layout
Transmit Description Descriptor Offload
6.1 TCP/UDP Offload Transmit Descriptor Command Field
Transmit Description
Tucmd
Dtyp
IDE RSV Dext TSE TCP
15. Command Field TDESC.TUCMD Layout
82544GC/EI only
6.2 TCP/UDP Offload Transmit Descriptor Status Field
7 TCP/IP Data Descriptor Format
16. Transmit Status Layout
Popts RSV STA Dcmd Dtyp Dtalen
17. Transmit Descriptor Tdesc Layout Type = 0001b
Popts
7.1 TCP/IP Data Descriptor Command Field
18. Command Field TDESC.DCMD Layout
IDE VLE Dext
TSE Ifcs EOP
19. Transmit Status Layout
7.2 TCP/IP Data Descriptor Status Field
Reserved
7.3 TCP/IP Data Descriptor Option Field
7.4 TCP/IP Data Descriptor Special Field
20. Packet Options Field TDESC.POPTS Layout
RSV Txsm Ixsm
Transmit Descriptor Ring Structure
21. Special Field TDESC.SPECIAL Layout
Transmit Descriptor Ring Structure
Transmit Descriptor Fetching
Transmit Descriptor Write-back
Transmit Interrupts
Delayed Transmit Interrupts
Assumptions
Transmission Process
TCP Segmentation Performance
Packet Format
TCP Segmentation Data Fetch Control
TCP/UDP Data FCS
TCP Segmentation Indication
3936
TCP Segmentation Use of Multiple Data Descriptors
TCP Partial Pseudo-Header Checksum
Version IP Hdr
IP and TCP/UDP Headers
Options
Fragment Offset Low
Type of service Version IP Hdr Length Fragment
Offset High Header Checksum
Destination Port Sequence Number
TCP Header
Length Checksum Urgent Pointer Options
Byte1 Byte0 Destination Port
Source Port Destination Port Length Checksum
Byte3 Byte2 Byte1 Byte0
17. UDP Pseudo Header Diagram for IPv4
Transmit Checksum Offloading with TCP Segmentation
9 IP/TCP/UDP Header Updating
19. Overall Data Flow
9.1 TCP/IP/UDP Header for the First Frame
9.2 TCP/IP/UDP Header for the Subsequent Frames
IP/TCP/UDP Transmit Checksum Offloading
9.3 TCP/IP/UDP Header for the Last Frame
Ipcss
Receive and Transmit Description
PCI Configuration
Mandatory PCI Registers
Address Description
PCI
Specification Update for the latest stepping information
Base Address Registers
Addr
All base address registers have the following fields
Field Bits Read Initial Description Write Value
Expansion ROM Base Address
Offset Space
Capabilities Linked List
Address Next Pointer
PCI definition for more details
Bits Initial Value Description
Status Register Layout
82547GI/EI
PCI-X Configuration Registers
PCI-X Capability ID
Next Capability
Byte Offset
PCI-X Command
Bits Read Initial
Write Value
Maximum Memory Read Byte Count. This register sets
USC SCD
PCI-X Status
Bits Read Intial Description Write Value
Command Register as follows
Reserved and Undefined Addresses
Message Signaled Interrupts1
Message Signaled Interrupt Configuration Registers
MSI Capability ID
Bits Read Initial Description Write Value 05h
Message Control
Commands
3.1.4 Message Address
3.1.5 Message Upper Address
3.1.6
Accepted PCI/PCI-X Command as a Target
PCI Commands Abr PCI-X Commands
Transaction Target PCI Commands PCI-X Commands
Transaction Cause PCI Commands PCI-X Commands
PCI/PCI-X Command Usage
Memory Write Operations
Master Write Command Usage Algorithm
MWI Bursts
PCI-X Command Usage
Memory Read Operations
MW Bursts
Rules for Memory Read Operations
Cache Line Information1
Outstanding Memory Read
Interrupt Assignment 82547GI/EI Only
LAN Disable
Target Transaction Termination
CardBus Application 82541PI/GI/EI Only
Eeprom Interface
General Overview
Component Identification
Component Identification Via Programming Interface
Stepping Vendor ID Device ID Description
Eeprom Device and Interface
Software Access
Signature and CRC Fields
Eeupdate Utility
Command Line Parameters
Eeprom Address Map1
Ethernet Controller Address Map
Word Used Bit Image
For the 82541xx and 82547GI
LAN a
82545GM 82540EP
82541xx and 82547GI/EI only
82546GB/EB only
82541xx
82545GM
82540EP/EM
ASF
GC/EI and 82541ER Eeprom Address Map
Word Description Default HW Access
Address Hi Byte Low Byte
Ethernet Address Words 00h-02h
Software Compatibility Word Word 03h
Software Compatibility Word Word 03h
Bit Name Description
SerDes Configuration Word 04h
Eeprom Image Version Word 05h
Compatibility Fields Word 05h 07h
PBA Number Word 08h, 09h
Initialization Control Word 1 Word 0Ah
Initialization Control Word 1 Word 0Ah
Subsystem ID Word 0Bh
Subsystem Vendor ID Word 0Ch
Device ID Word 0Dh, 11h1
Vendor ID Word 0Eh
Initialization Control Word 2 Word 0Fh
Initialization Control Word 2 Word 0Fh
82541PI/GI Only
Common Power Word 12h
Software Defined Pins Control Word 10h1, 20h
PHY Register Address Data Words 10h, 11h, and 13h 1Eh
OEM Reserved Words Words 10h, 11h, 13h 1Fh
Software Defined Pins Control Word 10h, 20h
CSA Port Configuration 2 Word 21h
CSA Port Configuration 2 Word 21h
Bit Description Default
20 D0 Power Word 22h high byte
21 D3 Power Word 22h low byte
Circuit Control Word 21h
Reserved Words 23h 2Eh
Management Control Word 13h1, 23h2
10. Initial Management Control Register Settings
82541PI/GI/EI and 82547GI/EI Only
SMBus Slave Address Word 14h1 low byte, 24h low byte
11. SMBus Slave Address
Initialization Control 3 Word 14h1 high byte, 24h high byte
12. Initialization Control
82546GB/EB uses INTB#
For Address 24h High Byte / LAN a
LED Configuration Defaults Word 2Fh2
Boot Agent Main Setup Options Word 30h
27 IPv4 Address Words 15h 16h1 and 25h 26h
28 IPv6 Address words 17h 1Eh1 and 27h 2Eh
15. Boot Agent Main Setup Options
DBS
Boot Agent Configuration Customization Options Word 31h
BBS
16. Boot Agent Configuration Customization Options Word 31h
SIG
Mode
DFU
Boot Agent Configuration Customization Options Word 32h
17. Boot Agent Configuration Customization Options Word 32h
IBA Capabilities Word 33h
IBA Secondary Port Configuration Words 34h-35h
18. IBA Capabilities
19. WOL Mode and Functionality Word 0Ah
20. WOL Mode and Functionality Word 20h
Checksum Word Calculation Word 3Fh
Eeprom Images
Parallel Flash Memory
21. Flash Memory Manufacturers
Manufacturer
Number
124
Flash Control and Accesses
Flash Interface Operation
Read Accesses
Write Accesses
Flash Buffer Write Cycle
128
Introduction to Power Management
Assumptions
Power States
D3cold support
Dr State
1.2 D0u State
1.3 D0a D0 active
Timing
1.4 D3
Power Up Off to Dr to D0u to D0a
Diagram #
Transition From D0a to D3 and Back Without PCI Reset
Transition from D0a to D3 and Back Without PCI Reset
Transition From D0a to D3 and Back with PCI Reset
RST#
PCI Reset Without Transition to D3
PCI Reset Sequence
PCI Power Management Registers
Bits Default Description
Capability ID Byte Offset = 0 RO
Next Item Pointer Byte Offset = 1 RO
Reserved
Power Management Capabilities PMC 2 Bytes Offset = 2 RO
Eeprom
Software Developer’s Manual 139
Pmcsrbse Bridge Support Extensions
3.6 Data Register
Byte Offset = 6 RO
Byte Offset = 7 RO
Advanced Power Management Wakeup
Wakeup
Acpi Power Management Wakeup
Pre-Defined Filters
Wakeup Packets
Directed Exact Packet
3.1.3 Broadcast
Directed Multicast Packet
3.1.4 Magic Packet*1
Offset Field Value Action Comment
Offset Field Value Action Comment Bytes
3.1.5 ARP/IPv4 Request Packet1
+ S a
+ D + S a
ARP
Directed IPv4 Packet1
Offset # of bytes Field Value Action Comment
Directed IPv6 Packet1
IPX Diagnostic Responder Request Packet Example1
Flexible Filter
+ S
+ D + S
Directed IPX Packet Example
3.4 IPv6 Neighbor Discovery Filter1
Wakeup Packet Storage
CRC
152
Ethernet Interface
Link Interfaces Overview
Internal SerDes Interface/TBI Mode- 1Gb/s1
1.2 8B10B Encoding/Decoding
Gmii 1 Gb/s
Code Groups and Ordered Sets
Code Group and Ordered Set Usage
Code OrderedSet
Duplex Operation
Internal Interface1
MII 10/100 Mb/s
Full Duplex
Half Duplex
Carrier Extension 1000 Mb/s Only
Packet Bursting
Auto-Negotiation and Link Setup1
Auto-Negotiation and Link Setup2
Link Speed
Link Configuration in Internal Serdes/TBI Mode1
Auto-Negotiation
TXCW.txConfigWord
Hardware Auto-Negotiation
Software Auto-Negotiation
Bit Description
Internal GMII/MII Mode
Forcing Link
Using Auto-Speed Detection ASD
Forcing Speed
Automatic Detection of Link Speed using SPD-IND
Duplex
MII Management Registers
Comments Regarding Forcing Link
Internal SerDes Mode1 Control Bit Resolution
Internal Serdes Mode1 Hardware Enabled
Internal Serdes1 Mode Software Enabled
Control Bit Effect on Control Bits
GMII/MII Mode PHY Speed Indication
Internal PHY Mode Control Bit Resolution
Internal Serdes Mode1 Auto-Negotiation Skipped
GMII/MII Mode Auto-Speed Detection
GMII/MII Mode Force Speed
Loss of Signal/Link Status Indication
Internal Serdes Mode
Internal PHY Mode
GMII/MII Mode Force Link
10/100 Mb/s Specific Performance Enhancements
Adaptive IFS1
Flow Control
MAC Control Frames & Reception of Flow Control Packets
10. Flow Control Registers
Register Name Description
3x MAC Control Frame Format
Discard Pause Frames and Pass MAC Control Frames
Transmission of Pause Frames
Software Initiated Pause Frame Transmission
External Control of Flow Control Operation1
802.1q Vlan Packet Format
1 802.1q Tagged Frames
Vlan Packet Format Comparison
Packet #Octets
Transmitting and Receiving 802.1q Packets
802.1q Vlan Packet Filtering
Adding 802.1q Tags on Transmits
Stripping 802.1q Tags on Receives
Packet Reception Decision Table
VFE
178
Configurable LED Outputs1
Selecting an LED Output Source
Polarity Inversion
Blink Control
Blink Control
182
PHY Functionality and Features
Auto-Negotiation
Register Update
Next Page Exchanges
11.2 MDI/MDI-X Crossover copper only
Status
Pin
1000BASE-T
Polarity Correction copper only
11.2.2 10/100 Downshift 82540EP/EM Only
Cable Length Detection copper only
PHY Power Management copper only
Link Down Energy Detect copper only
11.4.4 D3 Link-Up, Speed-Management Disabled copper only
11.4.3 D3 Link-Up, Speed-Management Enabled copper only
11.4.2 D3 State, No Link Required copper only
Mdio Control Mode
Initialization
Determining Link State
Overview of Link Establishment
Configuration Result
False Link
Forced Operation
Determining Duplex State Via Parallel Detection
Link Criteria
Auto Negotiation
Parallel Detection
11.7.1 1000BASE-T
Using SmartSpeed
Link Enhancements
11.7.3 10BASE-T
SmartSpeed
Low Power Operation
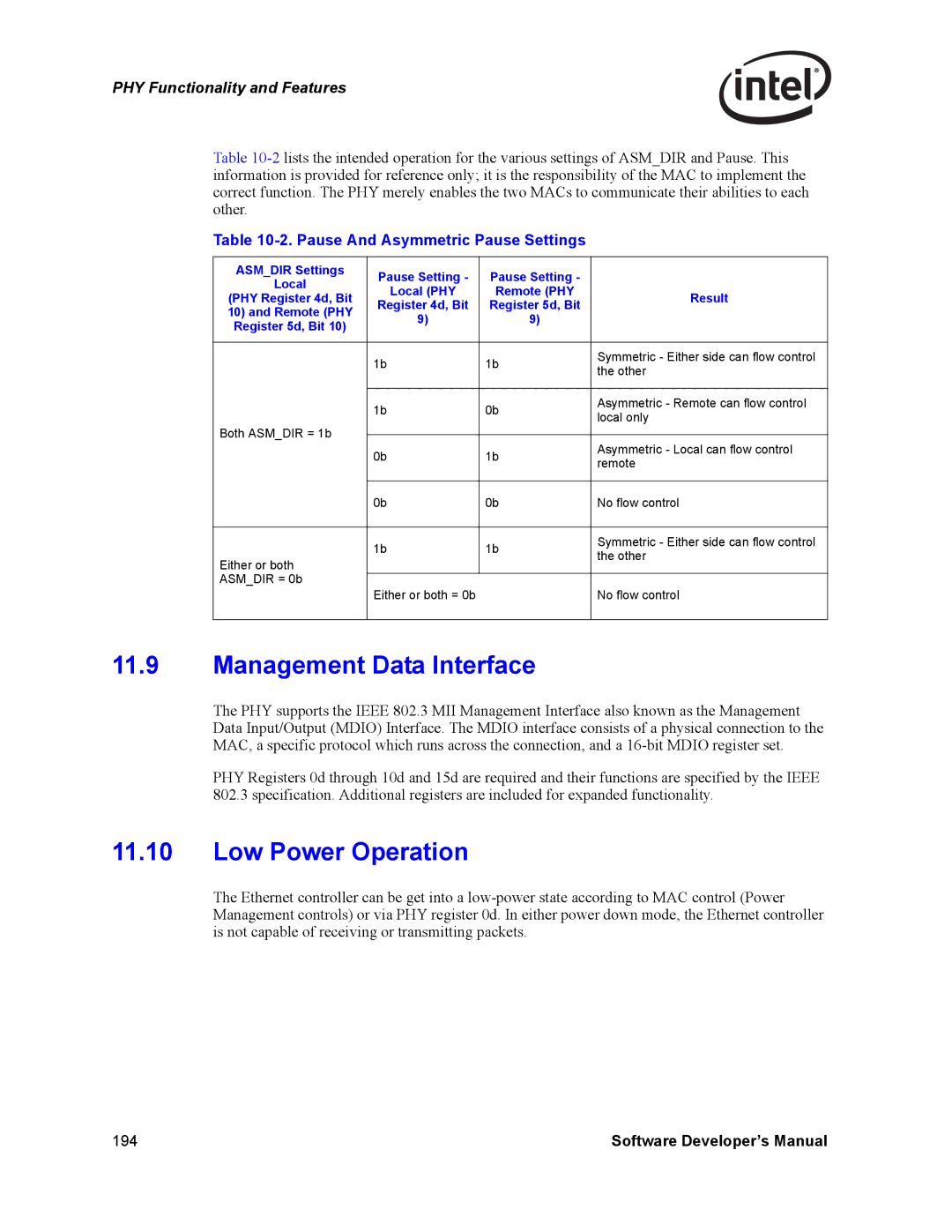
Pause And Asymmetric Pause Settings
Asmdir Settings Pause Setting
Management Data Interface
Smart Power-Down
Powerdown via the PHY Register
11.11 1000 Mbps Operation
DSP ECHO, Next 4DPAM5
Transmit Functions
Transmit Fifo
Spectral Shaper
Low-Pass Filter
Line Driver
Transmit/Receive Flow
Receive Functions
11.12 100 Mbps Operation
11.13 10 Mbps Operation
Descrambler
Viterbi Decoder/Decision Feedback Equalizer DFE
PHY Line Length Indication
202
Introduction1
Features of Each MAC
12.2.1 PCI/PCI-X interface
204
12.2.3 SDP, LED, INT# output
MAC Configuration Register Space
IO BAR
Eeprom Map
Shared Eeprom
Eeprom Arbitration
Flash Access Contention
Shared Flash
Values Sampled on Reset
Pin sampled LAN device controlled Enable/Disable
Multi-Function Advertisement
Power Reporting
Interrupt Use
Enabled
Summary
Interrupt Line Used
INTA#
Register Descriptions
Register Conventions
Memory-Mapped Access to Internal Registers and Memories
Memory-Mapped Access to Flash
Memory-Mapped Access to Expansion ROM
Memory and I/O Address Decoding
Ioaddr
Iodata
Offset Abbreviation Name Size
Ioaddr
Iodata Register Configurations
AD C/BE#30 Bits
Ethernet Controller Register Summary
Category Offset Abbreviation Name
82544GC/EI
82547GI/EI only
Ipat 82544GC
Xofftxc
Fcruc
PRC64
Gprc
Category
Abbreviation Name Register
82544GC/EI , 82541xx , or 82547GI/EI
To the 82544GC/EI , 82541xx , or 82547GI
PCI-X Register Access Split1
Device Control Register
Main Register Descriptions
Ctrl 00000h R/W
Ctrl Register Bit Description
Field Bits Initial Description Value
Ilos
SLU
Speed
Frcdplx
SDP0DATA
SDP1DATA
ADVD3WUC
Field Bits Initial Description
BEM = 0 64-bit mode Little-Endian
Device Status Register
Status 00008h R
Little-Endian Data Ordering
Txoff
Status Register Bit Description
Tbimode
Asdv
PCI66
Pcixmode
Pcixspd
EEPROM/Flash Control & Data Register
Eecd 00010h R/W
Eecd Register Bit Description
82544GC/EI Only
Eereq
Eegnt
Eepres
Eesize
Eerd 00014h RW
Eeprom Read Register1
Eeprom Read Register Bit Description
Eeprom Read Register Bit Description 82541xx and 82547GI/EI
Done Start
Flash Access FLA
Flash Access1
FLA 0001Ch R/W
Extended Device Control Register
Ctrlext 00018h, R/W
10. Ctrlext Register Bit Description
23 16
SDP6IODIR
SDP2IODIR
SDP7IODIR
Asdchk
Vreg Power
11. GPI to SDP Bit Mappings
Down
Linkmode
Swdpinshi
12 GC/EI Ctrlext Register Bit Description
Swdpiohi
CTRL.RST
13 GC/EI GPI to SDP Bit Mapping
MDI Control Register
Mdic 00020h R/W
14. MDI Control Register Bit Description
RSV PHY REG Data
Regadd
Phyadd
Register Mode Description
15. PHY Register Bit Mode Definitions
PHY Registers
Field Bits Description Mode HW Rst SW Rst
MSB
242
Enaxc
LSB
RO,L
Software Developer’s Manual 245
246
For the 82541xx and 82547GI/EI
82544GC/EI only 82541xx
Pause
82541xx 82547GI/EI 82541xx and 82547GI/EI only
82544GC/EI Only
ANEG3
ANEG2
RF1
Software Developer’s Manual 251
23. Link Partner Ability Register Base Page Bit Description1
82541xx and 82547GI/EI Only
24. PHY Link Page Ability Bit Description1
10BASE-T
100BASE-TX
1b 82541xx
Software Developer’s Manual 255
Bits Field Description Mode HW Rst SW Rst
Master
ANEG0
MASTER/SLAVE
ANEG1
258
Software Developer’s Manual 259
DIS
NLP
Preen
SFD
Software Developer’s Manual 263
264
Software Developer’s Manual 265
266
82541EI/82547GI B0 stepping
82541/GI/ER and 82547GI B1
268
HCD
NOK
Software Developer’s Manual 271
272
Field Bits Description Mode HW Rst
Ledactled
SPEED100LED
SPEED1000LED
276
Software Developer’s Manual 277
51. MDI Register 30 Operations
Documented MDI Register 30 Operations1
To Perform Operation MDI Read/Write Sequence
Flow Control Address Low
Flow Control Address High
Fcal 00028h R/W
Fcah 0002Ch R/W
Flow Control Type
Vlan Ether Type
FCT 00030h R/W
VET 00038h R/W
Flow Control Transmit Timer Value
Fcttv 00170h R/W
56. VET Register Bit Description
57. Fcttv Register Bit Description
Txcw 00178h R/W
Transmit Configuration Word Register1
58. Txcw Register Bit Description
Receive Configuration Word Register1
Rxcw 00180h R
59. Rxcw Register Bit Description
LED Control1
Ledctl 00E00h RW
ANC
LED1 ACTIVITY# LED0 LINKUP#
Mode Encodings for LED Outputs1
60. LED Control Bit Description1
61. Mode Encodings for LED Outputs
Mode Pneumonic State / Event Indicated
Packet Buffer Allocation
PBA 01000H R/W
62. PBA Register Bit Description
Field Bits Initial Value Description
ICR 000C0H R
Interrupt Cause Read Register
63. ICR Register Bit Description
RXT0
Mdac
Rxcfg
GPISDP6
ITR 000C4h R/W
Interrupt Throttling Register1
Interval
ICS 000C8h W
Interrupt Cause Set Register
64. ICS Register Bit Description
Interrupt Mask Set/Read Register
IMS 000D0h R/W
65. IMS Register Bit Description
To the 82544GC/EI
Interrupt Mask Clear Register
IMC 000D8h W
66. IMC Register Bit Description
Receive Control Register
Rctl 00100h R/W
67. Rctl Register Bit Description
SBP
MPE
LPE
LBM
Rdmts
BAM
Bsize
VFE
Cfien
Bsex
Pmcf
Secrc
XON Enable 82544GC/EI , 82541xx , and 82547GI/EI only
Flow Control Receive Threshold Low
Fcrtl 02160h R/W
68. Fcrtl Register Bit Description
Fcrth 02168h R/W
Flow Control Receive Threshold High
69. Fcrth Register Bit Description
Receive Descriptor Base Address Low
Receive Descriptor Base Address High
Rdbal 02800hR/W
Rdbah 02804h R/W
Receive Descriptor Length
Receive Descriptor Head
Rdlen 02808h R/W
RDH 02810h R/W
Receive Delay Timer Register
Receive Descriptor Tail
RDT 02818hR/W
Rdtr 02820h R/W
Receive Interrupt Absolute Delay Timer1
Radv 0282Ch RW
Receive Small Packet Detect Interrupt1
Transmit Control Register
Rsrpd 02C00h R/W
Tctl 00400hR/W
76. Tctl Register Bit Description
Cold
PSP
TCTL.COLD
Transmit IPG Register
Tipg 00410R/W
Rtlc
Nrtu
77. Tipg Register Bit Description
IPGR2 IPGR1 Ipgt
Aifs 00458R/W
Adaptive IFS Throttle AIT
IPGR2
Transmit Descriptor Base Address Low
Tdbal 03800h R/W
78. Aifs Register Bit Description
79. Tdbal Register Bit Description
Transmit Descriptor Base Address High
Transmit Descriptor Length
Tdbah 03804h R/W
Tdlen 03808h R/W
TDH 03810h R/W
Transmit Descriptor Head
82. TDH Register Bit Description
Transmit Interrupt Delay Value
Transmit Descriptor Tail
TDT 03818h R/W
Tidv 03820h R/W
TX DMA Control 82544GC/EI only
Transmit Descriptor Control
Txdmac 03000h R/W
Txdctl 03828h R/W
86. Txdctl Register Bit Description
Lwthresh RSV1 Gran RSV Wthresh Hthresh Pthresh
Transmit Absolute Interrupt Delay Value1
Tadv 0382Ch RW
Gran
Lwthresh
Tspbp Tsmt
TCP Segmentation Pad And Minimum Threshold Tspmt 03830h RW
Tspbp
Software Developer’s Manual 319
Receive Descriptor Control
Rxdctl 02828h R/W
87. Rxdctl Register Bit Description
Wthresh RSV Hthresh Pthresh
Receive Checksum Control
Rxcsum 05000h R/W
88. Rxcsum Register Bit Description
3111
Tuofld
Ipofld
IPV6OFL
Filter Registers
Multicast Table Array
MTA1270 05200h-053FCh R/W
89. MTA Register Bit Description
Destination Address
Receive Address Low
Receive Address High
RAL 05400h + 8*n R/W
RAH 05404h + 8∗n R/W
Vlan Filter Table Array1
VFTA1270 05600h 057FCh R/W
91. RAH Register Bit Description
RAH
Wakeup Registers
Wakeup Control Register
WUC 05800h R/W
92. VFTA1270 Bit Description
Wakeup Filter Control Register
Wufc 05808h R/W
Apmpme
SPM
Wakeup Status Register
WUS 05810h R
330
IP Address Valid
Ipav 5838h R/W
13.6.5 IPv4 Address
IP4AT 05840h 05858h R/W2
Address
Field Dword # Address Bits Initial Value Description
13.6.6 IPv6 Address
IP6AT 05880h 0588Ch R/W
IPV6ADDR0
Dword # Address Bits Initial Value Description
Wakeup Packet Memory 128 Bytes
Wakeup Packet Length
Flexible Filter Length Table
Flexible Filter Mask Table Ffmt 09000h 093F8h R/W
LEN0
LEN1
LEN2
Flexible Filter Value Table
Statistics Registers
Ffvt 09800h 09BF8h R/W
CRC Error Count
Alignment Error Count
Crcerrs 04000h R
Algnerrc 04004h R
Symbol Error Count
RX Error Count
Symerrs 04008h R
Rxerrc 0400Ch R
Missed Packets Count
Single Collision Count
MPC 04010h R
SCC 04014h R
Excessive Collisions Count
Multiple Collision Count
Ecol 04018h R
MCC 0401Ch R
Late Collisions Count
Collision Count
Latecol 04020h R
Colc 04028h R
Defer Count
Transmit with No CRS
DC 04030h R
Tncrs 04034h R
Sequence Error Count
Carrier Extension Error Count
SEC 04038h R
Cexterr 0403Ch R
Receive Length Error Count
XON Received Count
Rlec 04040h R
Xonrxc 04048h R
Xoff Received Count
XON Transmitted Count
Xoff Transmitted Count
FC Received Unsupported Count
Packets Received 64 Bytes Count
Fcruc 04058h R
PRC64 0405Ch R
Packets Received 65-127 Bytes Count
Packets Received 128-255 Bytes Count
PRC127 04060h R
PRC255 04064h R
Packets Received 256-511 Bytes Count
Packets Received 512-1023 Bytes Count
PRC511 04068h R
PRC1023 0406Ch R
Packets Received 1024 to Max Bytes Count
Good Packets Received Count
PRC1522 04070h R
Gprc 04074h R
Broadcast Packets Received Count
Multicast Packets Received Count
Bprc 04078h R
Mprc 0407Ch R
Good Packets Transmitted Count
Good Octets Received Count
Gptc 04080h R
Gorcl 04088h R/GORCH 0408Ch R
Good Octets Transmitted Count
Receive No Buffers Count
Gotcl 04090h R/ Gotch 04094 R
Rnbc 040A0h R
Receive Undersize Count
Receive Fragment Count
RUC 040A4h R
RFC 040A8h R
Receive Oversize Count
Receive Jabber Count
ROC 040ACh R
RJC 040B0h R
Mgtprc 040B4h R
Management Packets Received Count1
129. RJC Register Bit Description
Management Pkts Transmitted Count1
Management Packets Dropped Count1
Total Octets Received
Total Octets Transmitted
Totl 040C8h R/W / Toth 040CCh R
130. Torl and Torh Register Bit Descriptions
131. Totl and Toth Register Bit Descriptions
Total Packets Received
Total Packets Transmitted
TPR 040D0h R
TPT 040D4h R
Packets Transmitted 64 Bytes Count
Packets Transmitted 65-127 Bytes Count
PTC64 040D8h R
PTC127 040DCh R
Packets Transmitted 128-255 Bytes Count
Packets Transmitted 256-511 Bytes Count
PTC255 040E0h R
PTC511 040E4h R
Packets Transmitted 512-1023 Bytes Count
Packets Transmitted 1024 Bytes or Greater Count
PTC1023 040E8h R
PTC1522 040ECh R
Multicast Packets Transmitted Count
Broadcast Packets Transmitted Count
Mptc 040F0h R
Bptc 040F4h R
TCP Segmentation Context Transmitted Count
TCP Segmentation Context Transmit Fail Count
Tsctc 040F8h R
Tsctfc 040FCh R
Diagnostics Registers
Receive Data Fifo Head Register
Receive Data Fifo Tail Register
Rdfh 02410h R/W
Receive Data Fifo Head Saved Register
Receive Data Fifo Tail Saved Register
Rdfhs 02420h R/W
Rdfts 02428h R/W
Receive Data Fifo Packet Count
Transmit Data Fifo Head Register
Rdfpc 02430h R/W
Tdfh 03410h R/W
Transmit Data Fifo Tail Register
Transmit Data Fifo Head Saved Register
Tdft 03418h R/W
Tdfhs 03420h R/W
Transmit Data Fifo Tail Saved Register
Transmit Data Fifo Packet Count
Tdfts 03428h R/W
Tdfpc 03430h R/W
Packet Buffer Memory
PBM 10000h 1FFFCh R/W
151. Tdfpc Register Bit Description
152. PBM Bit Description
370
Power Up State
General Configuration
General Initialization and Reset Operation
Receive Initialization
Transmit Initialization
Fiber Copper 82544GC/EI
Ipgt IPGR1 IPGR2
Signal Descriptions
Signal Ball Name and Function
Signal Interface
Carrier Sense
Receive Data
Receive Clock
GMII/MII Features not Supported
Signal Functions
Signal Function Pin Gmii 1000 Mbps Operations
MII 10/100 Mbps Differences
Signal Functions Not Supported
Avoiding Gmii Test Modes MAC Configuration
Direct PHY Indications to MAC
Link Setup
CTRL.FD
PHY Initialization 10/100/1000 Mb/s Copper Media
CTRL.RFCE
Reset Operation
Lanpwrgood
382
Software Developer’s Manual 383
Initialization of Statistics
Diagnostics
Fifo State
Fifo Data
Loopback
Testability
Internal Loopback
Extest Instruction
SAMPLE/PRELOAD Instruction
Idcode Instruction
Bypass Instruction
388
New Features
Appendix Changes From 82544EI/82544GC
Register Changes
Table A-1. Register Changes
Register Offset
EEC
82540EP/EM Differences
Serial Flash Interface
Single-Port Functionality
No TBI/Internal SerDes Interface
4 32-Bit PCI Support