Page
Page
Page
Preface
Page
Table of Contents
Parameters
Troubleshooting
Operation and Start Up
Fault Code Information and Maintenance
Appendix a Specifications Appendix B Accessories
Appendix C How to Select the Right AC Motor Drive
Recommended Position the Rubber Magnet of the Digital Keypad
Introduction
Receiving and Inspection
Nameplate Information
Model Explanation
VFD110VL23A
15HP/5.5-11kWFrame C 20-30HP/15-22kWFrame D
Series Number Explanation
Drive Frames and Appearances
VFD750VL43A
Please refer to .3 for exact dimensions
40-100HP/30-75kWFrame E
Drive Features
Communication Port Internal structure Removable fan
Preparation for Installation and Wiring Ambient Conditions
Operation
Storage
Transportation
Remove Front Cover
15HP/5.5-11kWframe C & 20-30HP/15-22kWframe D
Step
Lifting
40-100HP/30-75kW frame E
Flange Mounting
Fixed plate Fixed pl ate
Fixed plate
Cutout Dimensions
15HP/5.5-11kW frame C
20-30HP/15-22kW frame D
Dimensions
Frame C
Unit mm inch
Frame
Frame D VFD150VL23A/43A, VFD185VL23A/43A, VFD220VL23A/43A
Frame D
255.0 226.0 403.8 384.0 360.0 21.9 168.0 10.04 15.90 15.12
Frame E
This page intentionally left blank
Installation and Wiring
Wiring
Installation and Wiring
Sink NPN mode Source PNP mode
Used with internal power +24Vdc
Used with external power
DC voltage Low voltage level Battery voltage
Run
Valve
EPS detection MI-COM=43 Electromagnetic Valve Drive ready
Loops
Grouning terminals
External Wiring
Main Circuit Main Circuit Connection
Brak e res istor
Pti onal Non-fuse break er
Motor
Mains power terminals R/L1, S/L2, T/L3
Output terminals for main circuit U, V, W
Models
Models Wire Torque Wire Type
Main Circuit Terminals
Position of External Terminals
Torque Wire Type
Control Terminals
OFF
REV
MI1
MI2
Analog input terminals ACI, AUI1, AUI2, ACM
Frame Torque Wire
Digital outputs MO1, MO2, MCM
AWG 0.3-2.1mm2
Terminal 0V/24V Kgf-com1.4 in-lbf AWG 0.051-1.3mm2
Installation and Wiring
Operation and Start Up
Operation Method
RUN
STOP/RESET
KPVL-CC01
Trial Run
Auto-tuning Operations Flow Chart
Basic parameter settings Motor tuning
Explanations for the Auto-tuning Steps
Operation and Start Up
Step
IM motor
PM motor
Step
SIN/COS
EMVL-PGABO/ABL
EMVL-PGABL
EMVL-PGH01/02
Step
Operation and Start Up
Trial run
Operation and Start Up
Operation and Start Up
Operation and Start Up
Parameters
Group 0 System Parameters
Summary of Parameter Settings
Parameter can be set during operation
Focpg Tqcpg Focpm
Group 1 Basic Parameters
Vfpg SVC Focpg Tqcpg Focpm
Group 2 Digital Input/Output Parameters
Vfpg SVC Focpg Tqcpg
By FWD/REV By Enable 02-25
Explanation Settings
Group 3 Analog Input/Output Parameters
03-19
Group 4 Multi-Step Speed Parameters
Group 5 IM Motor Parameters
Group 6 Protection Parameters
~100.0%
Group 7 Special Parameters
Group 8 PM Motor Parameters
Group 9 Communication Parameters
Group 10 Speed Feedback Control Parameters
SIN/COS
Group 11 Advanced Parameters
Group 12 User-defined Parameters
Group 13 View User-defined Parameters
00-01
Description of Parameter Settings
00-00
Factory setting
Content of Multi-Function Display
Factory setting
00-02
SEEEEEEE0 0 HzEE
DI EON/ OFFESt a t
DOEON/ OFFESt a t
FFF
MI8 MI7 MI6 MI5 MI4 MI3 MI2 MI1 REV FWD
Factory setting Read Only
Settings Read Only Display #.##
00-05
User Defined Coefficient K
Password Input Unit
Password Set Unit
Settings To 9998 and 10000 to Display
00-07
00-09Control Method
Decoding Flow Chart
Pass word Setting
00-10
00-11
00-12
230V/460V Series
Source of the Master Frequency Command
Source of the Operation Command
00-14
00-15
01-03
01-01
01-02
01-04
01-05
01-06
01-07
01-09
01-10
Output Frequency Upper Limit Unit
01-11
01-12
01-14
01-16
01-18
Switch Frequency between 1st/4th Accel/decel Unit
01-22
JOG Frequency Unit
01-23
1st/4th Acceleration/Deceleration Switching
01-31
01-29
01-28
Parameters
02-00 Control Circuits of the External Terminal
02-00
02-01
02-02
02-03
02-04
02-05
Settings Functions Descriptions
By Pr.07-28 setting
Eeprom
02-09
02-10
MI8 MI7 MI6 MI5 MI4 MI3 MI2 MI1 REV
02-11
02-12
Settings Control Mode
Settings Functions Descriptions
Active when the warning is detected
Enable
Input MI=40
Multifunction output MO=15
02-23
02-25
02-26
02-27
02-28
02-31
02-32
2 7=S
02-35
02-33
02-34
03-02
03-00
03-01
Settings 100.0~100.0%
03-03
Analog Input Bias 1 AUI1 Unit
03-04
03-05
03-06
03-07
03-08
03-12
03-13
03-14
03-15
03-21
03-18
Analog Output Gain Unit
04-00
04-01
04-02
04-03
Pr 06 Pr Equivalent circuit for VFD -VL ser ie s
05-00
Factory setting #.##
Settings 40 to 120%
05-02
05-03
05-12
05-13
05-14
05-15
05-16
05-17
Core Loss Compensation Unit
Settings To 250%
05-20
06-02
06-00
06-01
06-03
06-04
06-05
06-06
06-07
06-08
Pr.06-06
Pr.06-09
Pr.06-07
06-10
Operation time min
Load
Fac tor %
60Hz
Readings No fault
06-16 06-17 06-18 06-19 06-20 06-21
Parameters
06-30
Setting Method of Fault Output
Bit Fault code
Bit Fault code
Fault code Bit0 Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Current Volt
06-22
06-23
06-24
Bit1 Bit2 Bit3 Bit4 Bit5 Bit6 Fault code Volt
Fault code Current Volt. OL
Bit0 Bit1 Bit2 Bit3 Bit4 Bit5
06-26
06-27
06-28
06-29
07-00
07-01
07-02
07-03
07-05
07-0
07-06
07-07
07-13
07-11
07-12
07-14
07-15
07-17
07-18
07-19
07-20
07-21
07-22
07-23
07-24
07-25
07-26
100%
300% x 07-29=t
00-01
07-28
08-00Motor Auto Tuning
Settings No function
Rated Power of Motor Unit
08-02
08-03
08-04
08-05
08-06
Parameters
RS-485 5 NC 6 NC
09-00
09-01
09-02
Code Description
Ascii mode
RTU mode
STX
Data
Start
END
FEH
5CH
A0H
F7H
Count by word 02H CRC CHK Low
6FH
Content
AC drive Parameters Command Write only
Address Function
GG means parameter group, nn means parameter number
Content Address Function
Exception
Ascii mode RTU mode
A1H
09-05
ABZ
SIN/COS+
Settings Disable
Motor will run Motor won’t run 10-00=5
Motor will run 10-00=6
10-01
10-03
10-04
10-05
10-06
10-11
10-08
10-09
10-12
10-18
10-19
10-20
10-21
10-24
10-22
10-23
Setting auto gain adjustment Pr.11-00=1
Adjust by requirement
11-00
System Control
11-01
11-02
11-03
11-04
11-05
11-06
11-07
11-08
11-12
11-10
11-11
11-15
11-13
11-14
FREQ. Esetpoi NTn t
SEEEEEE6 0 1 2 0 0 Prog
Umap ADD0 Eeeetee SEEEEE0 8 0 3 0 8 0 3 0
PMSMOTORUB- Emf ET SEEEEEE6 0 1 3 0 0 Prog
FREQ. Esetpoi NTn t SEEEEEE6 0 Hz EEE
SEEEEEE6 0 1 2- 0 0 Prog
EEE- EEn d . E- EEE Eeeeeeeeeeeeeeee
DI SPL AYEUSER- SET SEEEEEE6 0 1 3 0
FREQ. Esetpoi NTn t SEEEEEE6 0 Hz EEE Prog
Systemsparameter press SEEEEEE6 0 0 0 EE twice
Ma x Eo f s Fc md i n t ET SEEEEEE6 0 1 3 0
2127
Settings Refer to group 12 for details
13-00
View User-defined Parameters
13-31
Troubleshooting
Over Current OC
Over Voltage OV
Ground Fault
Ground fault
Suitable power
Low Voltage Lv
Over Heat OH
Overload
Yes
Phase Loss PHL
Display of KPVL-CC01 is Abnormal
Motor cannot Run
Motor Speed cannot be Changed
Motor Stalls during Acceleration
Motor does not Run as Expected
Electromagnetic/Induction Noise
Environmental Condition
Affecting Other Machines
Fault Code Information and Maintenance
Fault Code Information
Common Problems and Solutions
EEE Fault Co d e 0 E
Ea t EAc c e l Eeeee
EEE F a u l t code 0 E3
Motor drive protection, not for protection of the user
EEE Fault Co d e 0 9 E
Display Description Ground fault Corrective Actions
EEE Fault code 1 E
Ea t ES t o p Eeeeee
EEE Fault code 2 E0
Eeef a u l t code 2 2 E
EEE Fault code 3 0 E
EEE Fault code 3 2 E
EEE Fault code 3 E
EEE Fault code 2 E7
FEEEFault code 3 E9
EEE Fault Co d e 4 E
EEE Fault code 4 E
EHWEEr r o r Eeeee
EEE Fault Co d e 5 E
PC EE r r ECo mma n d EE
EEE Fa u l t code 5 E
EEEFa u l t code 5 E6
Eeef a u l t code 6 3 E
Reset
EEE Fault code 5 E
Fault Code Information and Maintenance
Maintenance and Inspections
Voltage Maintenance Check Items Methods and Criterion
Keypad Maintenance Check Items Methods and Criterion
One
Main circuit Maintenance Check Items Methods and Criterion
Change of copper plate
Year
Visual, aural inspection and smell Or peculiar smell
Daily
Change fan Overheat
Daily
This page intentionally left blank
Appendix a Specifications
Per torque 100% Accel up 140% Cruise 80% Decel up Post
General Specifications
This page intentionally left blank
Appendix B Accessories
All Brake Resistors & Brake Units Used in AC Motor Drives
Decrease accordingly. Recommended cycle time is one minute
Appendix B Accessories
Dimensions and Weights for Brake Resistors
Dimensions are in millimeter
Order P/N BR500W030, BR500W100, BR1K0W020, BR1K0W075
Specifications for Brake Unit
189.5 200.0
Dimensions for Brake Unit
121.0 80.0 130.0
VFDB4132
Non-fuse Circuit Breaker Chart
Fuse Specification Chart
Phase Model
Model Recommended Input Current a
110 120 225
142 145 250
130 110 250
160 150 300
AC Reactor AC Input Reactor Recommended Value
AC Output Reactor Recommended Value
Impedance
37.5 52.5 18.5 67.5 82.5 120 100 150 130 195
Applications for AC Reactor
37.5 52.5 18.5 67.5 120 100 150 130 195 160 240
Correct wiring
M1 reactor
AC motor drive
AC motor drive Motor
Silicon rectifier Powerreactor AC motor drive Reactor Motor
Zero Phase Reactor RF220X00A
Diagram a
Diagram B
Nominal Method
230Vac Built-in 50/60Hz 18.5 110 Phase 125 460V DC Choke
460Vac 18.5 Built-in 50/60Hz Phase 110 125 200 100 240
DC Choke Recommended Values
230V DC Choke
Digital Keypad KPVL-CC01
Description of the Digital Keypad KPVL-CC01
=Sto p
=Ru n
Paramecopyeeeeee SEEEREADE1 Eeeeee
Paramecopyeeeeee SEEESAVEE1 Ev 1
Syst Emeparameter S0 EEEEEEEE0 0 EE
EEE- EEr r . E- EEE
How to Operate the Digital Keypad KPVL-CC01
To set parameters
When Read 1 starts blinking, it starts to save to KPVL-CC01
Enter parameter settings
From drive to KPVL-CC01
Press and hold on for about 5 seconds
Dimension of the Digital Keypad
Recommended Position the Rubber Magnet of the Digital Keypad
Terminal Symbols
Specifications
PG Card for Encoder
V, V, W, W
Encoder
Line driver
Division Factor
10 11
A/O B/O
A/O
B/O
Terminal Symbols Descriptions
Power source of encoder
Power source common for
TB1
A/O, B/O, B/O Z/O
Open collector
Leads B Leads a A/O B/O
EMVL-PGH01 only for Heidenhain ERN1387
Sinusoidal Encoder Function
SIN COS COS 900mech
+5V Vdc
900el
Terminal Symbols Descriptions Specifications
+ Z
SIN, SIN’
COS, COS’
Division factor
Leads B Leads a
EMVL-PGS01
+COS
Refcos
+SIN
Encoder
+ +CO S
+ +S
Data+
OA-GND OB-GND
OA-GND
Appendix B Accessories
AMD-EMI Filter Cross Reference
AC Drives Model Number FootPrint
50TDS4W4C VFD185VL43A
„ EN61000-6-4 „ EN61800-3 „ EN55011 1991 Class a Group
Saddle on both ends Saddle on one end
Length of motor cable
Dimensions are in millimeter and inch
230VAC input voltage
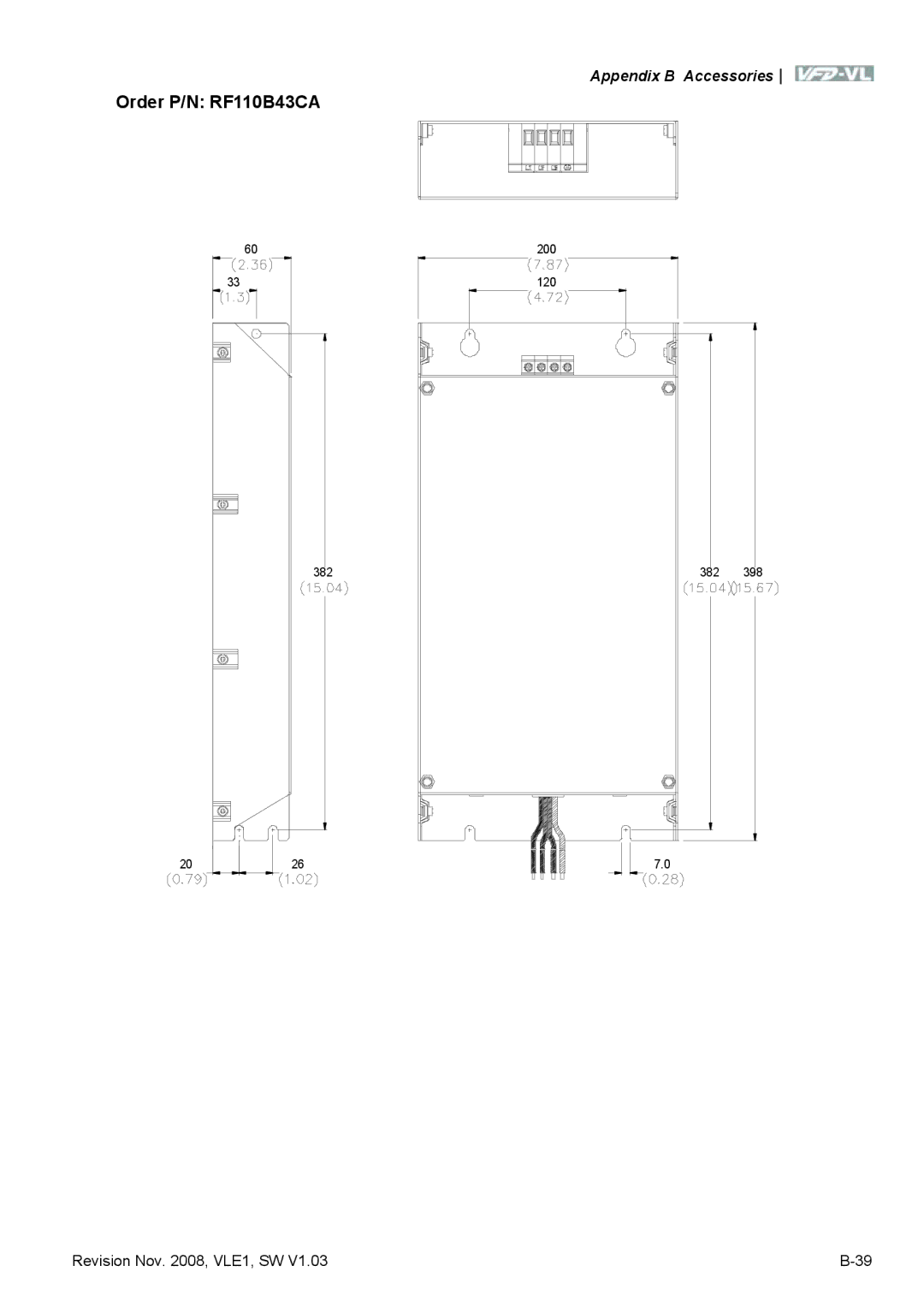
Order P/N RF110B43CA
Order P/N 50TDS4W4C Order P/N 100TDS84C
Order P/N 200TDDS84C
Order P/N 150TDS84C Order P/N 180TDS84C
Max +24V/5mA MO3~MO10 Internal circuit MCM
AVO1-AGND AVO2-AGND
AVO1 Agnd MO10 MO9 MO8
MCM MO7 MO6 MO5 MO 4 MO3
Relay contact Connect to J P19 On the c ontrol board
Safety Relay EMVL-SAF01 Functions of the Terminals
Wiring of the Safety Relay
Descriptions
This page intentionally left blank
Related Specification
Speed Time Overload Starting Torque Ratings
When one AC motor drive operates one motor
When one AC motor drive operates more than one motor
Capacity Formulas
„ Acceleration time ≧60 seconds Starting capacity=
⋅ IM ≤ the rated current of AC motor drive a
Selection Note
General Precaution
Parameter Settings Note
Standard motor
How to Choose a Suitable Motor
Torque% 25% 40% 60% 100 Continuous Frequency Hz
Special motors
Pole-changing Dahlander motor
Power Transmission Mechanism
Motor torque
This page intentionally left blank