FR-F500
This section is specifically about safety matters
Safety Instructions
Additional instructions
Treat as industrial waste
Emergency stop
Contents
102
100
103
104
Watt-hour meter clear/actual operation hour meter clear
163
192
184
195
Chapter
Chapter Outline
Installation
Precautions for operation
Wiring
Pre-Operation Information
Basic configuration
Basic Configuration
Japanese Harmonic Suppression Guideline
Name Description
Appearance and structure
Structure
Front view
Without front cover
FR-F520-0.75K to 11K, FR-F540-0.75K to 11K
Removal and reinstallation of the front cover
FR-F520-30K to 55K, FR-F540-30K to 55K
Removal and reinstallation of the operation panel
Chapter
Instructions for installation
Installation
Clearances around the inverter
97inches1.97inches
For installation in an enclosure
Wiring cover and handling 22K or less
Vertical mounting
NFB
Type Symbol Terminal Name Description
Symbol Terminal Name Description
Description of main circuit terminals
Description of control circuit terminals
Terminal Name Description
Type
RUN
IPF
Wiring instructions
Wiring of the main circuit
Overall wiring length 1.5K or more
Inverter Capacity 75K 5K or more
Motor Capacity Ground Cable Gauge 200V class 400V class
FR-F520-1.5K, 2.2K, 3.7K FR-F520-45K
Terminal block layout
FR-F520-5.5K, 7.5K FR-F520-55K
FR-F520-11K
FR-F540-5.5K, 7.5K, 11K FR-F540-45K, 55K
400V class FR-F540-0.75K, 1.5K, 2.2K, 3.7K FR-F540-30K, 37K
FR-F540-15K, 18.5K, 22K
Terminal names in parentheses are those of the EC version
Cables, crimping terminals, etc
Connection of the power supply and motor
Model FR-F520-0.75K to 3.7K, FR-F540-0.75K to 3.7K
Connection procedure
Model FR-F520-5.5K to 55K, FR-F540-5.5K to 55K
Terminal screw size M3.5 Tightening torque 1.2 N⋅ m
Wiring of the control circuit
Changing the control logic
Current flow related to RUN signal
How to use terminals STOP, CS and PC
Recommended cable connector
Connection to the PU connector
PU connector pin-outs
System configuration example
Wiring of one RS-485 computer and one inverter
Wiring method
RS-485 terminal Computer
Max m
Connection of the FR-BU brake unit option
Connection of stand-alone option units
Connection of the conventional BU brake unit option
Connection of the FR-HC high power factor converter option
Connection of the power factor improving DC reactor option
Connection of the FR-RC power regeneration converter option
Design information
Interlock Power Supply MC2 Leakage current
MC1
Power harmonics
Other wiring
Harmonics RF Noise
Japanese harmonic suppression guidelines
Received Power 5th 7th 11th 13th 17th 19th 23rd Over 23rd
Conversion Factors for FR-F500 Series
Class Circuit Type
Equivalent Capacity Limits
Harmonic Content Values at the fundamental current of 100%
ACL, DCL
Harmonic suppression techniques
FR-HC
Inverter-generated noises and reduction techniques
Noise Path Measures
Data line filter
Following measures must be taken
Bundle them
Data examples
Noise Induced to Signal Cables by Inverter Output
Noise Terminal Voltage of Inverter and Example
Its Reduction by Noise Filters
To-ground leakage currents
Leakage currents and countermeasures
# Example of counter measures against noise
# Countermeasures
Line-to-line leakage currents
Inverter-driven 400V class motor
Rectifying the motor insulation
Suppressing the surge voltage on the inverter side
Selection of peripheral devices
Peripheral devices
400V class
Example
Wiring of the power supply and motor
Standard to comply UL 508C 1 Installation
Branch circuit protection
Short circuit ratings
Motor overload protection
Instructions for compliance with the European standards
EMC Directive
Our view of transistorized inverters for the EMC Directive
During operation Storage During transportation
Low Voltage Directive
90% RH or less
Maximum Altitude 000 m 10,000 m
Earthing and Earth Leakage Current
Earthing EC version
Earthing methods
Unit mm2
OPERATION/CONTROL
PU operation mode
External operation mode factory setting
External/PU combined operation mode
Devices and parts to be prepared for operation
Communication operation mode
Before switching power on, check the following
Power on
Names and functions of the operation panel FR-DU04
Operation Panel
Key indications
Unit indications, operating status indications
Used to set the running frequency in the PU operation mode
Frequency setting
Monitoring
Parameter setting method
Help mode
Operation mode
Alarm history
Parameter clear
Alarm history clear
All clear
User clear
#Parameter setting mode
Copy mode
Simple mode parameter list
Parameter Checking and Setting
Parameter checking
Pr user group read selection
Name Application
Setting of maximum frequency Pr maximum frequency
Main parameter settings
Setting of minimum frequency Pr minimum frequency
Parameter Factory Setting
Selection of load pattern Pr load pattern selection
Application Setting
Gain
0Hz at 4mADC, 60Hz at
Pre-operation checks
Operation
External jog operation
Operation at 60Hz
Description Image
Start Press
PU jog operation
Stop Press
Motor is decelerated to a stop
Step Description
Decelerates when Pr = 9999 to a stop
Start
Hold down the key to change the frequency
Parameters
Parameter list
Parameter List
Setting Tion
F4 fourth frequency voltage
Minimum Factory Refer Cust Func Parameter Setting
PID
Can be accessed when Pr =
Function rewrite prevention
List of Parameters Classified by Purposes of Use
Parameter Factory Setting Range Remarks
Setting
Parameter Function Details
Torque boost Pr , Pr
Use Pr to set the lower limit of the output frequency
Pr maximum frequency Pr minimum frequency
120Hz To 120Hz
8888
Base frequency, base frequency voltage Pr , Pr , Pr
9999 To 120Hz Function invalid
Multi-speed operation Pr to Pr , Pr to Pr.27
Parameter Factory Setting Setting Range Remarks
60Hz To 120Hz 30Hz 10Hz 24 to 9999
To 360 s minimum setting increments 0.01 s
To 3600 s minimum setting increments 0.1 s
Factory Setting Range Remarks
Acceleration/deceleration time Pr , Pr , Pr , Pr , Pr , Pr
Pr electronic thermal O/L relay
Electronic overcurrent protection Pr
Acceleration
Decelerationtime s
Operated at
DC injection brake Pr to Pr
Value Operated
To 10 s
Pr starting frequency
Starting frequency Pr
5Hz To 60Hz
Output Characteristics
Parameter Factory Setting Range
Load pattern selection Pr
Pr load pattern selection
Jog operation Pr , Pr
Pr jog acceleration/deceleration timereference frequency
Pr jog frequency
Related parameters
Pr Setting Specifications of MRS Signal
Wiring example
MRS input selection Pr
Pr MRS input selection
Stall prevention Pr , Pr , Pr , Pr , Pr , Pr
Parameter Number Factory Setting Setting Range Remarks
To 120Hz 148
149
Pr multi-speed input compensation
Multi-speed input compensation Pr
Not compensated
Compensated
Function Description
Acceleration/deceleration pattern Pr , Pr.140 to Pr.143
When using the high power factor converter FR-HC
Setting When using the brake unit, power return converter
Regenerative brake duty Pr.30
Pr regenerative function selection
Pr.3335Hz Pr.3430Hz
Frequency jump Pr to Pr
Running Speed Parameter Setting Unit Pr Setting
Pr speed display Pr speed setting switch-over
Speed display Pr , Pr
144 4, 6, 8, 10 104, 106, 108
Automatic torque boost Pr , Pr
Factory Setting Setting Range Setting Capacity
Up-to-frequency sensitivity Pr
Pr up-to-frequency sensitivity
6Hz To 120Hz 9999 Same as Pr Setting
Output Signal
Output Signal
Output frequency detection Pr , Pr , Pr
Second stall prevention Pr , Pr
Pr Setting Operation
120%
Second stall prevention function is not activated
Set Pr to Pr and Pr in accordance with the following table
Parameter Number Factory Setting Setting Range
Output current monitor
Output frequency monitor
Set value 17, 24 monitor
100
Monitoring reference Pr , Pr
Setting Parameter
Maximum output voltage of terminal AM is 10VDC
To 120Hz Rated output
9999 1 to No restart
Parameter Factory Setting Remarks
Frequency 162 Search No frequency 163
164
To the load inertia moment, torque 165
Parameter Setting Description
Pr remote setting function selection
Remote setting function selection Pr
FrequencyOutput
Pr intelligent mode selection
Intelligent mode selection Pr
Operation Mode Description Automatically Set
Ordinary operation
Pr Ref. I for intelligent mode accel
Setting Pr Reference I for intelligent mode
Pr Ref. I for intelligent mode decel %
Setting Reference Current
Errors Reset for Retry Setting
Use Pr to select alarms to be reset for retry
Retry function Pr , Pr to Pr
P24
Retry is not made
Use Pr to set the number of retries at alarm occurrence
To 10 times Not output 101 to Output
Pr applied motor
Applied motor Pr
Motor
Parameter Factory Setting Description
Pr PWM frequency selection Pr Soft-PWM setting
PWM carrier frequency Pr , Pr
Refer to the following list and set the parameters
Pr 0-5V/0-10V selection
Voltage input Pr
Related parameters
To 5, 10 to
Input filter time constant Pr
Reset Selection PU Disconnection Detection
Pr filter time constant
Key from the PU during
Pr alarm code output selection
Alarm code output selection Pr
Alarm code output
Pr Setting Output Terminals
Parameter write inhibit selection Pr
Pr parameter write disable selection
Parameter Name
Pr reverse rotation prevention selection
Reverse rotation prevention selection Pr
Pr operation mode selection
Operation mode selection Pr
External signal input terminal STF, STR
To 4, 6 to
PU operation interlock
Switch-over mode
X12 MRS Function/Operation
X16 Signal Operation Mode
Operation mode external signal switching function
Operating Condition
X12 MRS
38 V/F control frequency voltage Pr to Pr
Confirm the settings of Pr , Pr and Pr
Parameter Number
Computer link operation Pr to Pr
Parameter Description Setting
Parameter Factory Setting Range Number
117 118 192 119 Data length 120 121 To 10 122 9999
123 9999 To 150ms 124
Computer programming Communication protocol
Required after no data error ACK. Refer to
Data format
Reply data from inverter to computer during data read
Data definitions
Send data from computer to inverter during data read
Control codes
= Data sending time s
Response time
Number of Bits
Stop bit length Bit Bits Data length Parity check
H7F
Instruction Data
HFF
Return
Instructions for the program
Instruction
Setting items and set data
H7A
HFA
H6E
H6D
Error Definition Inverter Operation
Error Code List
H6C
HEC
Operation at alarm occurrence
Communication specifications for RS-485 communication
Communication error
Operation Mode Operation Location
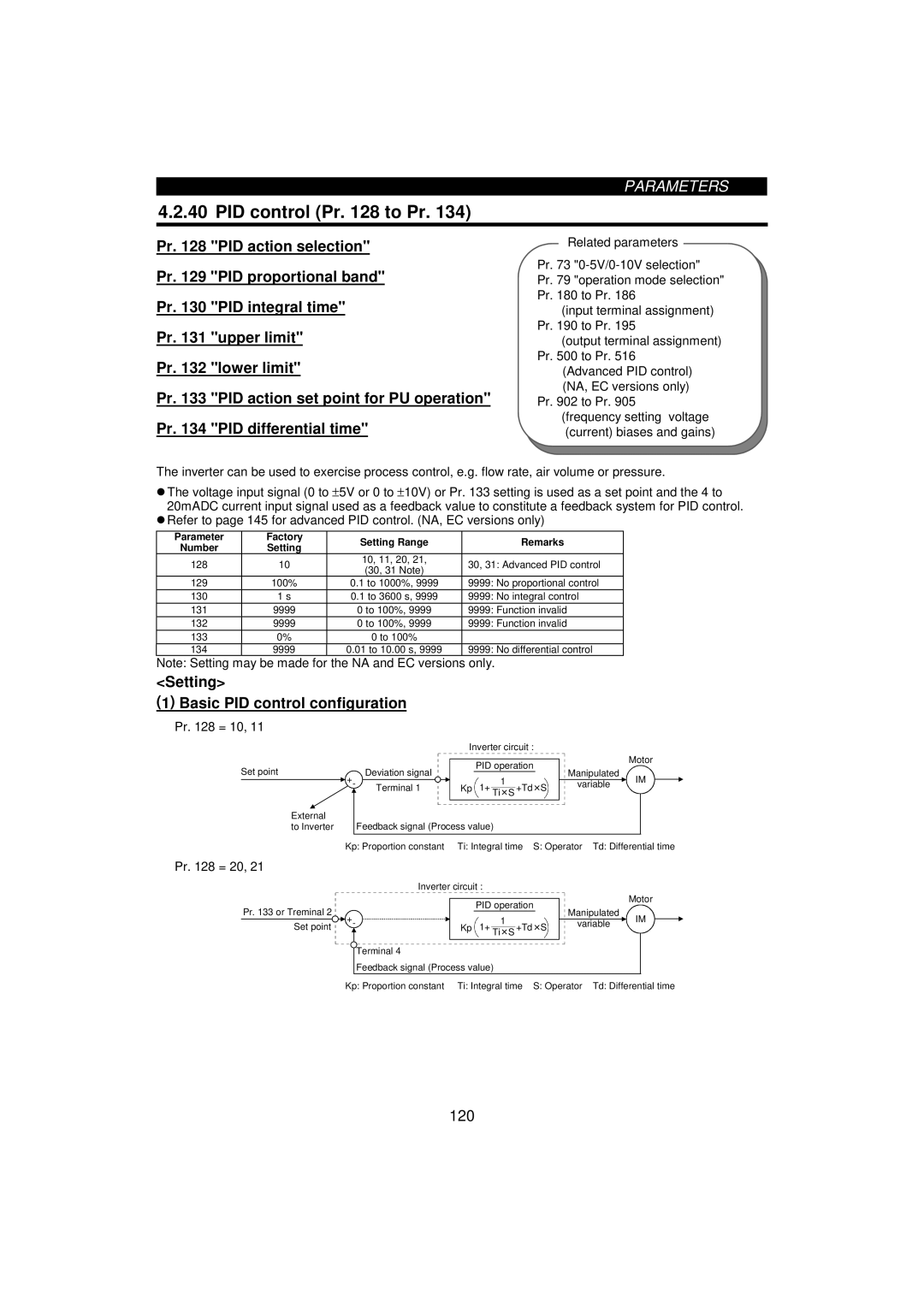
PID control Pr to Pr
Setting Basic PID control configuration
Pr = 10
Pr = 20
PID action overview
Pr =
Sink logic
Deviation
Reverse action Forward action
Signal
O signals
Function Description Remarks
Entry Description
Adjustment procedure
Parameter setting
Gain K = 1/proportional band 9999
132
Start
Calibration example
Detector output calibration
Set point input calibration
137
135 136
138 139 9999 To 60.0Hz No automatic
NFB MC1
Sink logic, Pr = 7, Pr = 6, Pr = 17, Pr = 18, Pr =
Magnetic Place of Installation Role
Signals
Signal Terminal Used Description
Roles of the magnetic contactors MC1, MC2, MC3
Commercial power To 60.0Hz 139
Parameter Name Setting Description
Operation sequence
Sets the MC2 and MC3 operation interlock time
Operation procedure for running Operation pattern
Operation procedure
Signal on-off after parameter setting
OFF OFF →
Pr to Pr % Refer to Pr Pr , Pr % Refer to Pr
Zero current detection level
Zero current detection Pr , Pr
Zero current detection period
Related parameters Pr to Pr
Pr RT signal activated condition
RT signal activated condition selection Pr
Stall prevention function and current limit function Pr
Pr stall prevention operation selection
Deceleration
#...Operation not #...Not activated Acceleration
100 Driving
101 Driving
Pr OL signal waiting time
OL signal output timer Pr
157 To 25 s No signal output
Related parameters Pr RUN terminal function selection
Examples of use
User group selection Pr , Pr to Pr
160 9999 10, 11 173 174
Batch deletion
184 Current input selection AU For the NA and EC 185
Input terminal function selection Pr to Pr
Jog operation selection JOG
Setting Signal Functions Relevant Parameters
Refer to the following table and set the parameters
Output terminal function selection Pr to Pr
Commercial power supply Inverter switch-over MC3 125
Commercial power supply Inverter switch-over MC1
FAN
Sleep
Pr users initial value setting
User initial value setting Pr
Setting example
199
Pr output phase failure protection selection
Output phase failure protection selection Pr
Cooling fan operation selection Pr
Pr cooling fan operation selection
Pr override bias Pr override gain
Override bias/gain Pr , Pr
50%
150%
Advanced PID control Pr to Pr NA, EC versions only
Pr motor switch-over selection = 1 Alternative Method
Pr motor switch-over selection = 0 Basic Method
Pr =0
Pr =1
System configuration
Pr motor switch-over selection = 2 Direct Method
Pr motor switch-over selection = 0 Basic Method Example
DC24V
Signal name Function
Parameter Number Name Additional Setting Description
Parameter Number Name
Start Stop
Motor switch-over timing
Start
Name Setting Range
Stopstart
Output stop detection
M1 operation
Status transition chart
Sleep
EC version 50Hz
Commercial power
Supply operation
Pr FM terminal calibration Pr AM terminal calibration
Meter frequency meter calibration Pr , Pr
Calibration of terminal FM
Calibration of terminal AM
When operation panel FR-DU04 is used
Operation procedure
902 0Hz To 60Hz 903
Frequency setting voltage current bias and gain Pr to Pr
904 4mA 0Hz To 20mA To 60Hz 905
To 20mA To 120Hz
Mode
Power-on monitoring mode
Mode
#Setting change
#Parameter setting mode
Least significant
Press to change the set frequency Press for 1.5 s
To 90 to Current setting of gain frequency
# Analog voltage A/D value % Across terminals
⋅ 9 times
Analog voltage calibration value 5V 10V, 20mA
Once to display the current For 0V 0mA, 100% for
#Press
Pr buzzer control
Buzzer control Pr
990 Without beep, 1 With beep
Protective Functions
Error alarm definitions
Errors Alarms
Major faults
OV During Acc
OC During Dec
Check for too slow acceleration
Decrease the acceleration time
Find the cause of instantaneous power failure occurrence
Instantaneous power failure is within 15ms
Remedy the instantaneous power failure
Ground Fault
Set the ambient temperature to within the specifications
Output side ground fault overcurrent protection
Check for a ground fault in the motor and connection cable
Check for a wrong option function setting and operation
Option slot alarm 1 to
Check the communication cable for wire breakage
Parameter storage device alarm
CPU Fault
Find the cause of alarm occurrence
Fault
CPU error
Output phase failure protection
Check for a short circuit in the PU connector cable
P24
Check for a short circuit in the PC terminal output
Minor fault
PU stop Stop made by pressing
Reduce the load volume or the frequency of operation
Key of the PU has been set in Pr PU
Stop selection
Correspondences between digital and actual characters
To know the operating status at the occurrence of an alarm
Actual Digital
Resetting the inverter
Alarm code output
Key to reset the inverter
Speed greatly differs from the setting
Troubleshooting
Motor remains stopped
Motor rotates in opposite direction
Power lamp is not lit
Operation mode is not changed properly
Motor current is large
Speed does not increase
Precautions for maintenance and inspection
Precautions for Maintenance and Inspection
Check items
Periodic inspection
Pressure test
Insulation resistance test using megger
Daily and Periodic Inspection
Disconnect cables
Inspection Description Periodic Method Crlterlon Instrument
Analog meter Converter Across terminals
Module device numbers and terminals to be checked
Checking method
Assumes the use of an analog meter
Tester Polarity Measured Value
Part Name Standard Replacement Interval Description
Replacement of parts
Cooling fan
Smoothing capacitor in main circuit
Smoothing capacitors
Inverter replacement
Relays
Measurement of voltages and currents
Measurement of main circuit voltages, currents and power
Typical Measuring Points and Instruments
Measuring Point
Measuring Points and Instruments
5VDC
10VDC
Specifications
Model specifications
Standard Specifications
36.0
Voltage, frequency Permissible AC
Setting To +10V, 11 bits/-5 to +5V
Common specifications
Collector output
Alarm
Unit mm inches
Outline drawings
Unit mm inches
# FR-F520-5.5K, 7.5K, 11K # FR-F540-5.5K, 7.5K, 11K
FR-F520-45K 450 380 430 550 525 250 154
Inverter Type FR-F520-37K 340 270 320 550 530 195 71.5
FR-F520-55K 480 410 460 700 675 250 154
W1 W2 H H1 FR-F540-30K,37K 340 270 320 550 195 71.5
# Operation panel FR-DU04
Outline drawing Panel cutting dimension drawing
Chapter Options
Stand-alone options
Option List
193
Name Type Function
Inboard dedicated options
Appendices
Multi-speed setting speed
Appendix Data Code List
Data Codes
Read
PID
118 Communication speed
Read Write
Name Read
Func
Output stop cancel process value level
Motor switch-over selection
Auxiliary motor start delay frequency
Auxiliary motor stop delay frequency
Print Data Manual Number Revision
Manual number is given on the bottom left of the back cover