M P a X U s e r G u i d e
Contents
Compax 1000SL Unit characteristics
Compax 25XXS unit characteristics
Compax 45XXS/85XXS unit characteristics
Technical data
Contents
Interfaces 138
173
Optimization functions 125
Process interfaces 179
Appendix 207
226
238
Key to unit designation Hauser type plate
General dangers
Compax 0260M
Please check the software version of your unit
General dangers
Safety instructions
Special safety instructions
Safe working practices
Conditions of warranty
Conditions of warranty
Commissioning
Switch-on status
Configuration when supplied
COMPAX-M / -S LED
Configuring
Motor is powered Compax display shows RUN Flow chart
Commissioning
Transferring system parameters
Equipment replacement
Previous software ≥
Previous software ≤
Compax 35XXM
Equipment replacement
NMD10 / Compax 45XXS / Compax 85XXS
Compax 25XXS
Start-up manual
Overview
Components required
Overview of unit technology
Common function characteristics
Overview
Compax P1XXM COMPAX-M
Dimensions DxHxW 275*350*125 mm Design Power KVA
Dimensions DxHxW 146*180*85 mm Design
Design Power KVA
KVA
Connector and terminal assignment
COMPAX-M unit features
COMPAX-M unit features
Connector and terminal assignment
Short circuit connectors
COMPAX-M system network, NMD10 / NMD20 mains module
Voltage Power supply Control voltage
Wiring up mains
Power / control
Screened Connection Upper unit side
COMPAX-M dimensions/installation
Compax P1XXM, Compax 05XXM, Compax 15XXM
Compax 02XXM, NMD10, NMD20
Connector assignment COMPAX-M
Connector assignment COMPAX-M
Dimensions / installation
Mains module NMD10/NMD20
Overview NMD
Mains module NMD10/NMD20
NMD connector assignment
Technical data / power features NMD
CE conformity
NMD10
NMD20
LED red LED green Possible errors Error Ready
If a phase malfunctions, no displays appear
Technical data / power features NMD
Ready contact and green LED are coupled
Compax 35XXS unit features
Plug and connection assignment Compax 35XXM
Specific technical data
Compax 35XXS unit features
Installation and dimensions of Compax 35XXM
Regeneration mode
Wiring Compax 35XXM
PE connection must be a version of at least 10mm2
Compax 35XXM connector assignment
Assignment of X12 does not apply for the S3 option
LED / color Meaning, when switched on
Compax 25XXS unit characteristics
Compax 25XXS connector and connection assignment
Meaning of the LEDs on the front plate
Compax 25XXS connector and connection assignment
Compax 25XXS unit characteristics
Wiring up motor
On unit side
Compax 25XXS 1000 ∝ F / 27 Ws
Compax 25XXS-specific technical data
Connecting ballast resistance to COMPAX-S
Compax 25XXS ≤ 1.0 kW Unlimited With R ext ≥ 56 Ω ≤ 2.5 kW
Design in series
Compax 25XXS dimensions / installation
Compax 25XXS dimensions / installation
Flat design
Connector assignment Compax 25XXS
O1...O8
Plug and connection assignment Compax 45XXS/85XXS
Compax 45XXS/85XXS unit characteristics
Compax 45XXS/85XXS unit characteristics
Plug and connection assignment Compax 45XXS/85XXS
Compax 45XXS/85XXS installation / dimensions
Meaning of the LEDs on the front plate
Compax 45XXS/85XXS-specific wiring
Wiring up motor Control voltage Enable
Compax 45XXS/85XXS-specific wiring
Enable bridges
Enable internal ballast resistance X2/5 X2/6
Maximum braking power of the internal ballast resistance
Compax 45XXS/85XXS connector and pin assignment
Assignment/ cable
PE terminal
Compax 1000SL Unit characteristics
Connector and terminal assignment for Compax 1000SL
LED display
Connector and terminal assignment for Compax 1000SL
Compax 1000SL Unit characteristics
Unit wiring
Compax 10XXSL 660 ∝ F / 17 Ws
Connector assignment Compax 1000SL overview
Mating connectors X1, X2, X3
Bridges for test operation
Mounting and dimensions Compax 1000SL
Mounting and dimensions Compax 1000SL
Safety chain / emergency stop functions
Readiness, safety chain Emergency stop
Emergency stop and ready on connector
Ready contact max .5A
Emergency stop input direct to COMPAX-M
Emergency stop input on COMPAX-M
60V, 30W
Cable assignment in the terminal boxes
Connections to the motor
Resolver / SinCos
Resolver / SinCos
Length m
Connections to the motor
Length codes for preformed cables
Code
Packaging of device
Procedure
MOK42 max ,8A
Material
MOK21 max ,9A
MOK21
SinCos cable for HJ and HDY motors
Version in high-flex GBK17 same layout
Connections to the motor Additional brake control
External contact connection
Assignment of X8 Input/Output
Interfaces
Digital inputs and outputs excluding Compax 1000SL
Assignment of X10 Input/Output
Start
Interfaces Digital inputs and outputs for Compax 1000SL
GND
24VDC
Technical data / Connections of inputs and outputs
Compax 1000SL
Connection plan for the initiators with initiator connector
Interfaces Initiators and D/A monitor
Connection assignment on
Service D/A monitor / override
Service D/A monitor / override
Service D/A monitor
Wiring of override with screened cables only
Standard
Interfaces
Monitor
Measuring
7 D/A monitor option D1
Meaning and range of values of P71 P74
Absolute value sensor option A1 Interfaces
Wiring diagram SSK1/...COMPAX PC/terminal
8 RS232 interface
Cable plan GBK1/.. Compax absolute value sensor
Area of application of process interfaces
Encoder interfaces / analogue rpm specification for Compax
10 X13 Encoder interfaces
Assignment on
Process interfaces Configuration options
Encoder interface Step direction input for Compax 1000SL
Interfaces
Configuring
Process
Applications with Compax 1000SL and encoder
Cable plan
Interfaces Heda interface option A1/A4
Bus connection
SSK14
Technical data
Power characteristics
Bus connection optional
Operation
Housing
Permissible 3-phase mains
Standard delivery
Operating Instructions
RS232 / RS485 Bus-Systems
Operating Instructions
PLC data interface
Program memory / parameter memory
Functions
Setting Parameters
Explanations for the block structure
System controller
Password Protection Activate password
Password protection
Interfaces for signals
Deactivate
Meaning of the bus parameters Acknowledging error messages
Configuration
Configuration
Front plate operation not available with Compax 1000SL
Power on with motor switched off
Configuration when supplied
Configuration process
Switching off the drive Modifying parameters
Safety instructions for initial start-up
Power on for drive
Risks from incorrect wiring
Normal mode Continuous mode Speed controller
Configuration parameters
Operating mode
Unit for travel data
Motor type
Ramps
Linear
Smooth Quadratic
Drive type
Spindle drive
Transfer of P94
General drive
P213=0 P213=1
Reference system
P215 direction of rotation
Specifying software end limits
P206=2
Absolute value function with standard resolver
Activated with
Absolute value function with standard resolver
Machine zero mode
Real zero
Machine zero
Additional machine zero modes
P213 Standard machine Zero mode for linear Movements
Machine zero equals external initiator & resolver zero
P212 =1 Find machine zero Application
Resolver zero pulse is a fixed
Machine zero initiator MZ-INI is
Low active
Position of the rotor position
Conditions for this operating mode
Machine zero equals external zero pulse
P213=0 P29=0 P29=90 General rotatory
P212=4 only permitted for Compax XX00 and Compax
Find machine zero Application
Machine zero equals resolver zero
P212 =5 Find machine zero Application
P212 =7 Find machine zero Application
Condition
Wiring up
Function
P212 =8 Find machine zero Application
Operating Instructions
Limit switch operation
COMPAX-M / -S
Installing ServoManager
Configuration via PC using ServoManager
Configuration via PC using ServoManager
Configuring Compax
EMC
Other parameters are derived from the type plate data
Nominal motor speed for the Hbmr motors
Min-1
Parameter for saturation characteristic curve
Holding brake For motors with holding brake
Drive type
Safety instructions for the first start-up
Individual configuration of synchronous motors
Positioning and control functions
Positioning and control functions
Start program
Absolute positioning Posa
Absolute positioning Posa
Relative positioning Posr
Posa value
Process velocity Speed
Acceleration and braking time Accel
Switch off drive unit. Output O0
Setting/resetting an output Output
Setting multiple digital outputs Output O12=1010
O12=1010
Password Goto
Password Goto
External velocity specification. Speed Sync
External speed set via option E7
Mark-related positioning Posr
Preparatory instructions
Preparatory instructions
Changes in speed within a positioning process Posr Speed
Syntax Example
Speed step profile extended by ramp time
Compatibility
Posr x Speed y Accel z
Changes in speed within a positioning process Posr Speed
Comparators during positioning Posr Output
Diagram of specified example for Posr Output
Diagram of example using Posa -1000 as positioning
Comparators during positioning Posr Output
Function of the cam controller
Cam controller with compensation for switching delays
Cam controller with compensation for switching delays
Outputs of the cam controller
Problem point
Explanation regarding cam controller
105
Example 2 Positioning with subsequent cam operation Compax
Explanation
Sub-program jump Gosub
Rogrammable waiting time Wait
Program jump Goto
Instruction to end a sub-program. Return
If I7=1
Start a program loop Repeat
Branching if I7=1
Binary if query of inputs if I12=101-1
Comparative operations
Specific processing of data record groups. Wait Start
Jump with data record selection Goto EXT
If Error Gosub
Error handling if Error Gosub
Function Priority Error program
Sub-program jump with data record selection Gosub EXT
Wait Start
Error program with
Stop / Break handling if Stop Gosub
Stop / Break handling if Stop Gosub
N241 Wait Start
Stop program
N001 if Stop Gosub
N243 Return
Curve memory
Arithmetic
Parameter assignments
Example
Arithmetic and variables
Status values Variables
Division y = x1 Example
Or absolute
115
Read status and assign variables Initializing variables
OM2
Position monitoring P93=1, 2
Functional description
OM3
OM2 O5 = 1 nominal value reached and lag error P14
OM3 O5 = 1 nominal value reached
Idle display
Idle display
Bit counting begins with 119
Speed monitoring in speed control mode P93=4
OM1 O5 toggles when speed is reached
Nominal value
Can be adjusted using P227 bit 429 =0 default setting
OM3 O5 =
Reached
PLC sequential step tracking
PLC sequential step tracking
Implementation
Via
Final stage blocked by Final stage is enabled via
Engaging and disengaging the motor brake
Range of values
Service D/A monitor channels
Output of variable voltage
Option D/A monitor channels
Optimizing the movement cycle
User-defined settings
Optimization functions
Optimizing with the ServoManager
Sensor
User-defined settings with variant P59=
Output of variable voltage Optimization process
Increase control dynamic
Structure
P59 Structure switch measuring P23 stiffness of drive
Optimization parameters
Variants
P24 damping of drive
P56 D section rpm controller
Increase damping Reduce damping
Advance control measures
Advance control of speed, acceleration and power
Optimization functions
Without advance control measures
Speed control
P26 Advance acceleration control P70 Advance power control
P25 Advance
Advance speed control
Control processes for optimization
Accel
Speed monitor
Function Settings Using the speed monitor
Speed monitor
Speed determination standard
Optimization display
Optimization display
P233/P23430 Meaning
Reference value 80 000A2
Square of peak motor current
You will find a complete status list on Page207
Use the effective value
Access to additional parameters via S13 and S14
P233/P234 Meaning
External position localization with position adjustment
Configuring the external position adjustment
Only available in Compax
P214
Slip filter for external position localization
Limit values
Drive type Measuring unit Determining
Digital inputs and outputs
Digital inputs and outputs
Assignment of standard unit
Input Assignment
Digital inputs and outputs Output Assignment
P156 bit
Allocation of logic inputs for input pins
Digital inputs and outputs for Compax 1000SL
P157 bit
Following assignment must be configured Input X19 pin
Digital inputs and outputs Example
Operating Instructions
Inputs
Free assignment of inputs and outputs
Free assignment
Free assignment of outputs
Output Function Valency
Compax virtual inputs
Heda
Remarks regarding the structural diagram
Interrogation of inputs in the Compax program if
1.4 I/O assignment of variants
Function of inputs
Hand+/Hand
Exception Start
Find MZ
Approach RZ
Input Shift
P211 blocking and modifying teach in functions
Activate position adjustment
Break
Quit Start Stop
Fast start
Synchronous Stop using
Diagram
Synchronous Stop
Additional assignment of P219
No fault
Function of outputs
No warning
Diagrams
Data record memory mode
Caption
Finding machine zero in normal mode Approaching real zero
Direct command
Specification
Before the 1st machine zero travel, O3=0
Input/output Meaning
BCD coded
Syntax of individual commands
Acceleration time
157
Operating Instructions
Signal procedure using the example of a status query
Commands
Procedure for transmitting a sign
Function codes
3 RS232 interface
Interface description
RS232 interface Function Activation using P20 Valid From
$=com19600,N,8,1
Positioning commands
Interface functions Direct command entry
Commands permitted for the various modes of operation
Influencing the active positioning process
Read the status values
Read and write program sets and parameters
P211 blocking and modifying the teach in functions
Negative command acknowledge- ment
Transmitting control instructions
Quit
Statuses
Commands available
All operating modes
Output O0
Binary data transfer using RS232
P20 switching on binary data transfer
Meanings of the binary command codes
MSB LSB
RS232 interface Valency *1
Examples of the number format of xx xx xx xx xx Number
360 450,5
Process coupling using Heda Option A1 / A4
Fast start
Transmittable parameters Master output quantity
Slave input quantities
Permissible combinations and required parameter settings
P98 is identical in all units
Application examples 1st unit Master Slave
Synchronizing
Error handling
Error messages
Process values
172
System concept
System concept
Accessories and options
174
Power module NMD
Options
EMD motors Linear motor
Unit Nominal Peak current Power kVA
Motors
Current Aeff Aeff 5s With mains supply 230V AC
Initiator set
Hauser linear actuators
Hauser linear actuators
177
Data interfaces
1 RS232
Bus systems
Encoder interface
Process interfaces
Process interfaces
Meaning Unit
Encoder module and accessories
Individual connections
Applications with encoder
Requirements per Compax EAM 4/01
Compax Compax
Compax not
BUS 1/01
Encoder bus mixed
Following are required
Encoder module
Enable absolute value sensor input
High resolution SinCos sensor system S1/S2
Technical data
Process interfaces Absolute value sensor A1
SinCos multi-turn with programmable transmission factor
Option S3 for linear motors
S2 option
See 184
Process interfaces Heda interface
6 D/A monitor D1 option not available with Compax 1000SL
Signal Circuit proposal EAM4/01 Input
Configuration Accuracy Connection assignment
Connector Pin X13 or
I16 = 1 external nominal value is valid
BDF1/03 with housing
Accessories
BDF1/02 for front plate installation
External control panel not available for Compax 1000SL
Terminal assignment
Wiring plan
Terminal module for Compax 1000SL EAM
SSK6
Input voltage range 100V DC 650V DC
3 EAM5/01 DC feed for COMPAX-M
EAM5/01 DC feed for COMPAX-M
Design of EAM5/01
Delivery scope
Power filter
EMC measures
NMD10 / Compax 45XXS / 85XXS
Length of connection between power filter
Motor output throttle
Compax 25XXS Compax 10XXSL
External ballast resistors
Dimension diagram BRM4, BRM6 and BRM7
BRM5/01 is fitted with a 0.3m connecting cable
Compax 25XXS with external ballast resistance of 56Ω
Maximum permitted length
Diagrams Brake pulse power cooling period
Authorised braking impulse power with NMD20
Is 2m
Authorised braking impulse power for NMD20 with BRM4/02
195
Authorised braking impulse power for NMD20 with BRM4/01
196
Authorised braking impulse power for Compax 4500S
Compax 8500S
197
198
199
ServoManager
ServoManager
Hand-held terminal
200
Keys Function
Special Compax XX70 commands
Hand-held terminal Functions
Special functions
Hand-held terminal Menu
Status Level
View Edit, delete program
Hand-held terminal
VC is generated when you exit the menu
View, edit and reset parameter
View, set configuration
Exits the menu without VC
Set configuration
205
Appendix Compax components
206
Actual values
Status values of the standard unit Compax
Status values of the standard unit Compax XX00
Diagnosis values
Special Compax XX00 status values
Appendix
Unit designations
Meaning of status bits
Explanation of error history S18
Output of status bits via the front plate
S16, S17
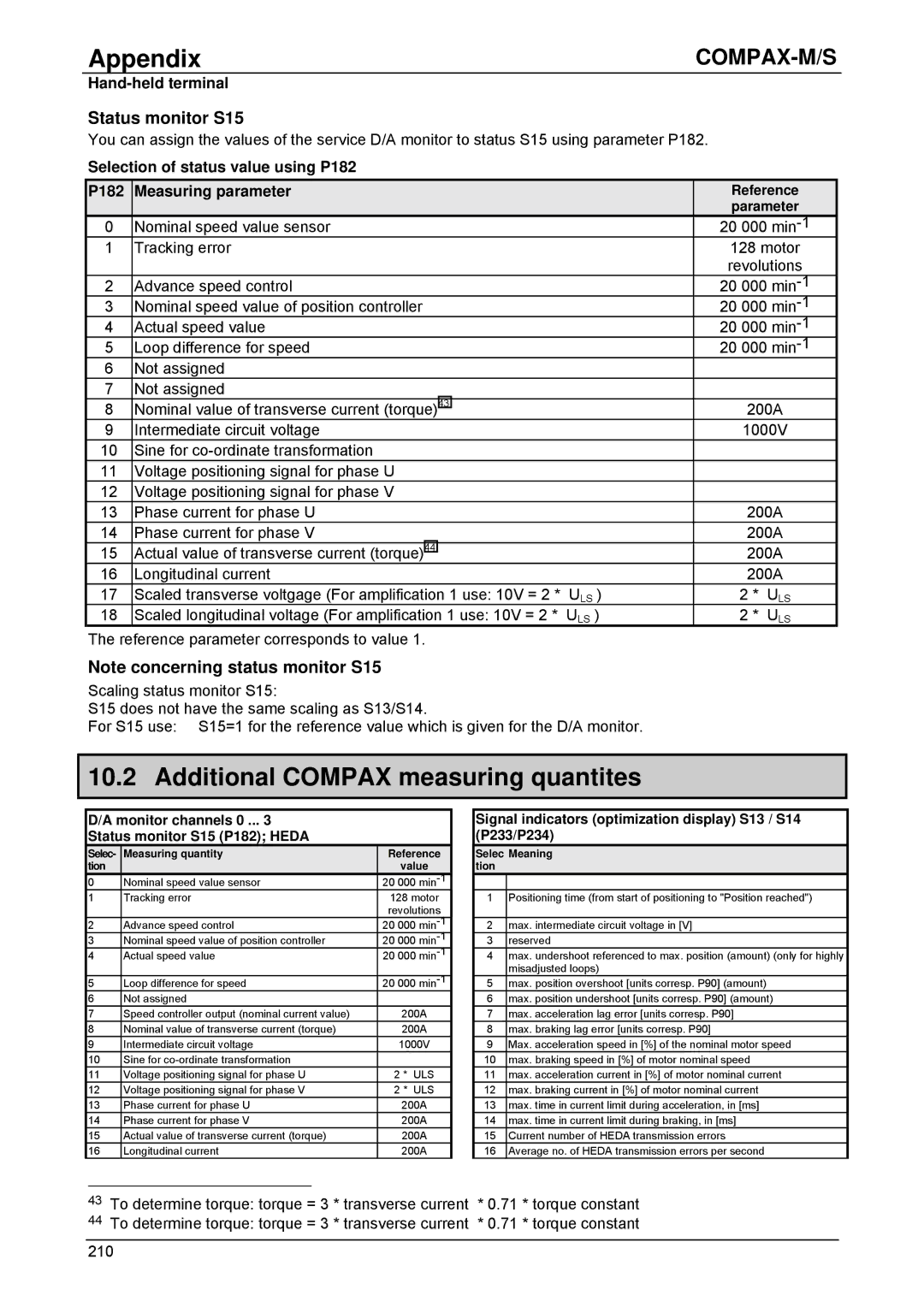
Status monitor S15
Selection of status value using P182 Measuring parameter
Additional Compax measuring quantites
Scaled longitudinal voltage For amplification 1 use 10V =
Additional Compax measuring quantites
211
Compax parameter
VP parameter46can be modified On Line
Compax standard parameters
Remark
Only permitted with P18 when bit 1=1
Compax parameter
List of parameters, sorted by number
P20 setting
Compax standard parameters
Drive Type Spindle drive P80=2
Rack
General drive drive type P80=16
EMC
P112 Slip frequency MHz 100 P113 Maximum speed Min-1 9000
P115 Angular speed 100 200
Source for
P144 Settting encoder channel
X19
Bit 0 Input
P212 Machine zero mode
Default value P184=0
Enable final stage with Output O0=0 without
Settings 3 and 4 with Compax XX00
Output Word
P245 Assign outputs O1
P243 Heda operation
Mode
O8 to the Heda
Dynamic monitoring
Monitoring and limitation characteristics
Structural diagram
Static monitoring
Error handling and error messages
Error handling and error messages
With Compax 70 Curve number not present 223
224
Too hard E40
Quit is not required
Response to lag error error E10 Position controller
Response to E15
Speed control mode, control is referenced to speed
Application examples
Application
Wiring up the digital inputs and outputs
External data record selection
Assignments
Names of inputs and outputs
Configuration
Programming
List of programs
Mark-referenced positioning
Mark-referenced positioning
Mark reference = block
Sets the acceleration and braking ramp
N003 Output O7=0 Shears = block
Message = mark found
Speed step profiling / comparator switching points
Speed step profiling / comparator switching points
Names of the inputs and outputs
Speed Sync
Speed control mode
Design and wiring up of the digital inputs and outputs
Speed control mode
Interlock # closed # open
N019 if I10=0 Goto removing Operating mode query
Light barrier
Sets the accelerating and braking ramps to 10s
Fast start
Assignments Function
Fast start
Changing error response
Using speed control mode
Position controller mode
Implementing a torque controller
Index
COMPAX-25XXS
COMPAX-M / NMD
If Error Gosub
Installation arrangement COMPAX-M
Installation / dimensions
Installation Dimensions
Limit switch monitoring Without locking
Process interfaces Configuration options
Power on with motor
Power with linear motor
Safety chain Emergency stop
Compax 25XXS Compax 45/85S COMPAX-M
Compax 25XXS Compax 45/85S